自動駕駛意味著決策責任方的轉移
中國2020至2025年將會是向高級自動駕駛跨越的關鍵5年。自動駕駛等級提高意味著對駕駛員參與度的需求降低,以L3級別為界,低階別自動駕駛環境監測主體和決策責任方仍保留於駕駛員,而L4、L5高級別自動駕駛的環境檢測主體和決策責任方則會轉移至系統,即由系統進行環境監控,再將所感知到的資訊進行處理決策,再根據決策執行相應的操作,如轉向、制軔等。即感知層與決策層系統承擔的職能會逐級遞增,系統構成難度及所需元件也需逐級增加。

自動駕駛:感知、決策、執行,同步前進演化
決策層概述:軟體定義汽車,硬體同步升級
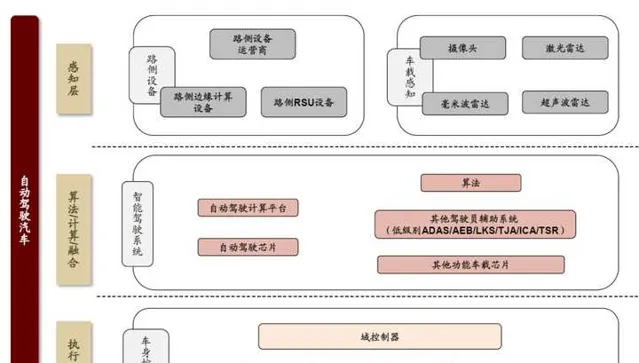
決策層主要由芯片、計算平台和軟體構成,可視為自動駕駛的中央大腦。
在進行決策規劃時,決策層會從感知層中獲取道路拓撲結構資訊、即時交通資訊、障礙物資訊和主車自身的狀態資訊等內容。結合上述資訊,決策規劃系統會對當前環境作出分析,然後對執行層下達指令,模擬大腦決策。
自動駕駛的實作,需要決策層在「軟體+硬體」上雙重提升,軟體在演算法,硬體主要就是汽車芯片。

決策層軟體:自動駕駛需要AI演算法支持
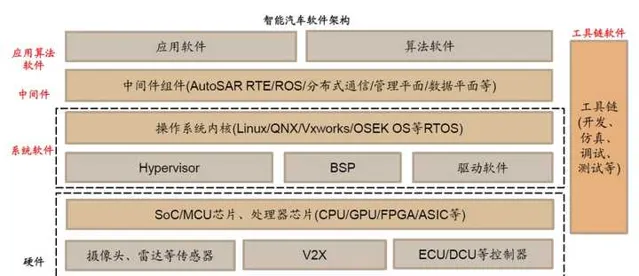
智慧汽車裏的軟體主要可以分為套用演算法軟體、中介軟體、系統軟體和工具軟體。
系統軟體主要包括作業系統以及底層驅動和板級支持包等。中介軟體位元於作業系統和套用演算法軟體之間,抽象化硬體資源,為上層的套用和演算法軟體開發提供統一的軟體介面,方便上層軟體開發呼叫;
套用軟體包括資訊娛樂系統的人機互動、界面設計,ADAS軟體、車身控制軟體等。高級別自動駕駛套用軟體背後需要靠基於人工智慧或深度學習的演算法軟體來提供支撐。
現在越來越多的芯片商開始提供工具鏈軟體來幫助主機廠研發自己的自動駕駛演算法。工具鏈軟體具體包括測試、設計和研發所用到軟體模組。例如ECU軟體的測試和驗證,自動駕駛系統的仿真測試等。
決策層硬體:乙太網路普及,控制器集中,算力提升
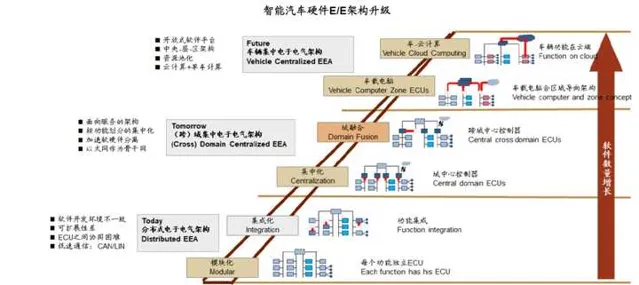
智慧汽車E/E硬體架構升級主要為3個方面:
1)乙太網路取代CAN/LIN:具有寬頻寬、低延時、低電磁幹擾的乙太網路將成為未來車內通訊網路的新骨幹。(L2級別的ADAS需要超過120Mbps的傳輸速率,傳統CAN匯流排傳輸速率為1Mbps左右,乙太網路的傳輸速率為1Gbps左右。)
2)控制器架構走向集中化:傳統汽車記憶體在許多個模組化的ECU(電子控制器)使得汽車內部線束復雜、各控制單元間通訊困難不利於整車數據互動和協同,難以實作整車統一的OTA升級。未來分布式E/E架構將經由(跨)域集中式最終邁向中央集中式,並透過一個高效能的中央控制器實作車雲端運算。
3)控制器集中和決策層算力提升對內在芯片提出要求,傳統MCU芯片無法滿足智慧化要求,SoC芯片需求大增。