零點是指使z變換X(z)的值為零的z值,極點是指使X(z)的值為∞的z值。如果X(z)是有理分式,表示為:
X(z)=\frac{B(z)}{A(z)}=\frac{b_0+b_1 z^{-1}+\cdots+b_M z^{-M}}{a_0+a_1 z^{-1}+\cdots+a_N z^{-N}}=\frac{\sum_{k=0}^M b_k z^{-k}}{\sum_{k=0}^N a_k z^{-k}}
也可以理解為:
物理意義為,
零極點的影響:
從時間域上,極點和零點會影響二埠網路的瞬時響應(就是大家做仿真時候看的transient)。例如如果有些零極點對會造成電路 輸出上升下降時間很慢 。二埠網路拉普拉斯域輸出Vout(s)即輸入Vin(s)與傳輸函式H(s)的乘積:
V_{\text {out }}(s)=H(s) V_{\text {in }}(s)=\sum_{j=1}^m \frac{K_H}{s-p_{j H}}+\sum_{j=1}^n \frac{K_{I N}}{s-p_{j N}}
重點關註,零極點對模擬系統的影響。
系統的零極點決定了系統的 頻率特性 和 穩定性 。 系統的穩定性與閉環傳遞函式的極點有關。如果 閉環傳遞函式的所有極點都在s平面的左半平面 ,即實部都為負數,那麽系統是穩定的。如果有任何一個極點在s平面的右半平面,即實部為正數,那麽系統是不穩定的。如果有極點在虛軸上,即實部為0,那麽系統是臨界穩定的,會發生持續振蕩。
只 含有左半平面極點的系統才是穩定的 ,因為這樣可以保證系統對任何有界輸入都能產生有界輸出。如果有右半平面極點,那麽系統對某些輸入會產生無界輸出,即發散。如果有虛軸上的極點,那麽系統對某些輸入會產生持續振蕩,即不收斂。
拉氏變換s與實際頻率f理解
所謂的零極點,主要是因為在對訊號進行頻率分析的時候,需要求解系統的傳遞函式。然而直接求解過程中,由於微分方程式、積分方程式等的復雜性,對於系統的分析具有較高的難度。通常的處理方法是對系統的微分方程式進行傅立葉變化或拉氏變換(重點理解拉氏變換),拉氏變換將傳遞函式從時域轉換為頻率,將實際物理中的頻率f轉換為s域中的s。即:拉氏變換可以將時域的微分方程式轉化為復頻域的代數方程式,從而簡化了求解過程。 實際訊號的頻率和拉氏變換s中的角頻率是有一定關系的 。實際訊號的頻率是指訊號或系統在時域上周期性變化的快慢,單位是赫茲(Hz)。 拉氏變換s中的角頻率是指訊號或系統在復頻域上旋轉的快慢 ,單位是弧度/秒(rad/s)。兩者之間的轉換關系是: ω=2πf 也就是說,當實際訊號的頻率增延長,對應的角頻率也會增加,反之亦然。但是, 實際訊號的頻率只能取正值 ,而 角頻率可以取正負值 。就是公式的值可以轉換,但是f只能有正值,而角頻率ω卻能有負值,數學符號上的含義是ω取負時,複數平面代表s值按照逆時針旋轉。 當ω絕對值相同,大小相反,代表著物理中相同的頻率點 。
這是因為 拉氏變換s中還有一個衰減因子σ ,它決定了訊號或系統在復頻域上的衰減或增長。當σ為正時,訊號或系統是不穩定的,當σ為負時,訊號或系統是穩定的。
拉氏變換中的ω和相位θ的關系
拉普拉斯變換中s運算式中的ω和複數平面旋轉的θ的關系是這樣的:
左半平面極點穩定理解
理解了拉氏變換s和實際頻率的關系後,所謂的左半平面極點, 指的是該系統的傳遞函式中,s的解為負數或者實部為負數的共軛復極點,該系統就可能穩定 。 左半平面極點是指在複數平面上,實部為負的極點 。它們通常與系統的穩定性和因果性有關。根據拉普拉斯變換和z變換的關系,s平面的左半平面對映到z平面的單位圓內部,所以 線性時不變因果穩定的系統,其極點都在s平面的左半平面 。
左半平面和右半平面極點的區別是, 左半平面極點的實部為負數,右半平面極點的實部為正數。(都是指的拉氏變換中s的解,該解為負數,即為複數平面) 他們的物理含義是:
只有左半平面極點的系統才能穩定, 是因為 這樣可以保證系統對任何有界輸入都能產生有界輸出 。如果有右半平面極點,那麽 系統對某些輸入會產生無界輸出,即發散 。 如果有虛軸上的極點,那麽系統對某些輸入會產生持續振蕩,即不收斂。
理解右半平面極點造成的不穩定
右半平面極點會使系統的相位提前,並且在高頻時增益不會衰減到零,而是趨近於一個常數值。這樣就會破壞系統的相位裕度和增益裕度,使系統無法滿足奈奎斯特穩定準則,從而引起系統的不穩定性和振蕩。
共軛復極點理解
當在解拉氏變換後的傳遞函式時,有可能會得到s等於共軛復數的結果,或者稱之為共軛對。 即,s的解實部相同,虛部互為相反數。例如: s_1=σ+\text iω和s_2=σ-\text iω 當σ為負數時,該系統穩定;當σ為正數時,該系統發散。 共軛復極點的物理含義和後果取決於具體的套用場景,但一般來說,它們與系統的 穩定性、頻率響應、頻寬、相位等 有關。 例如,在電路分析中, 共軛復極點可以用來實作帶通濾波器 ,提高系統的選擇性和靈敏度。 共軛復極點的實部決定了系統的阻尼系數 ,如果實部為負,系統是穩定的;如果 實部為零 ,系統是臨界穩定的;如果實部為正,系統是不穩定的。
共軛復極點 會造成系統的振蕩現象 ,振蕩的頻率由極點的虛部決定,振蕩的振幅由極點的實部決定。穩定系統的共軛復極點還會造成電路的過沖,如下圖所示:

共軛復極點造成過沖現象 如何避免共軛復極點的出現,主要取決於系統的開環傳遞函式的特性。一般來說,有以下幾種方法可以嘗試:
單極點系統
單極點系統是一種只有一個極點的線性系統,其傳遞函式可以表示為
H(s)=\frac{A_0\omega_0}{s+\omega_0}
其中, A_0 是直流增益, \omega_0 是極點頻率。
https:// zhuanlan.zhihu.com/p/20 918998一個典型的單極點系統電路如下圖所示:
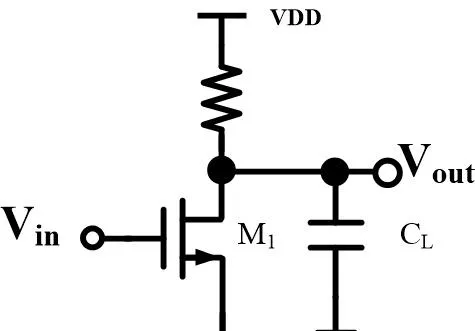
一個nmos和一個resistor,組成了一個基本的common-source amplifier。 暫時忽略Cgs、Cgd等寄生電容造成的高頻零極點。這個電路便是一個單極點系統:唯一的極點就在輸出Vout那裏。(負載電容 C_L 和輸出端等效電阻形成RC並聯諧振無窮大) 該電路的傳遞函式為: H(s)=\frac{A_0}{1+\frac{s}{\omega_0}} 據此畫出該單極點電路的波特圖:
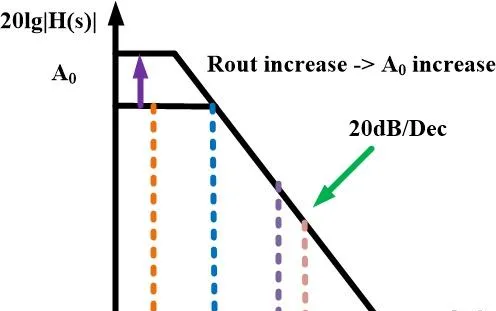
單極點系統有以下特性:
要分析單極點系統,可以使用波特圖(Bode plot)來表示系統的幅頻特性和相頻特性。波特圖可以用以下步驟繪制:
單極點系統的頻率響應運算式可以用以下公式表示:
高階無源網路極點的判別(時間常數法)
概述
高階無源網路極點的判別所使用的時間常數法是基於以下原理:
基本原理
要對一個系統進行零極點分析,首先要知道單極點系統和兩極點系統的基本分析,然後化繁為簡,采用單極點近似得到系統的大致頻率響應特性。 電路極點運算式經過化簡後,可以看到一次項系數為時間常數求和,二次項系數為時間常數求積,因此只要得出時間常數,即可直接寫出電路的極點運算式。
未完待續









