本文主要是對英文論文【Baidu Apollo EM Motion Planner】(By Haoyang Fan, Fan Zhu)的學習總結。
自動駕駛的技術,從軟體層面來說,分成基於嵌入式系統的軟體平台部份,以及演算法部份。前者提供類似OS(如Windows、MacOs,或手機上的IOS、Android)一樣的執行支持和資源分配管理功能,後者更接近於提供具體功能的APP。
自動駕駛的演算法一般主要分成感知、融合、規劃、控制,其中規劃處於承上啟下的位置,作用是根據感知結果和環境資訊,產生車輛的移動軌跡,從而讓控制演算法按照這個軌跡控制車輛的移動。
這篇文章說的就是規劃演算法之中一個常用的演算法:EM Planner。它針對的是L4級別的自動駕駛場景。
EM planner同時覆蓋多車道和單車道的自動駕駛,基於EM-type iterative algorithm。
一、從總體來看
整體思路:
- 平行計算每條車道的軌跡,基於Frenet frame來叠代計算最優的path和speed。
- 比較每條車道的軌跡,判斷換道策略。
- 計算最優的path和speed:結合動態規劃和基於樣本的二次規劃求解。
主要考慮的自動駕駛安全形度 :
- 交通法規
- 覆蓋範圍:8秒或200公尺的軌跡
- 工作周期:100ms內
- 緊急安全:當前方輸入模組出錯,輸出緊急保險策略
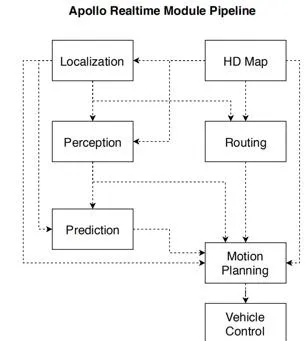
阿波羅頂層軟體架構:
考慮的駕駛體驗及最佳化方向:
- 場景覆蓋(基本行駛、換道、擁堵等)
- 交通法規
- 舒適度(軌跡的smoothness)
多車道策略
對於L4自動駕駛,必須考慮換道策略。要決定車輛在不同車道中,走哪一條車道的哪個軌跡,常規做法是在所有車道中,基於cost來搜尋最優軌跡,但這樣的弊端在於:
- 搜尋空間太大成本高;
- 交規在不同車道是不同的;
- 應避免突然換道。
EM中的換道策略分成主動換道和被動換道,主動換道由routing模組觸發,預設車道被阻擋則觸發被動換道。
所有障礙物和環境資訊都會投射到每個備選車道的Frenet frames,每個車道再各自符合交規,每個車道都會根據cost生成一條最優軌跡,再選出全域最優軌跡。
求解最有軌跡的演算法: Path-Speed Iterative Algorithm
在F座標裏面找最優軌跡是一個3D約束最佳化問題,一般有兩種方式:
1、直接求解:
軌跡采樣或柵格(lattice)搜尋。受限於隨著空間時間而增加的搜尋復雜度,因此得出的軌跡是suboptimal次優的。path主要考慮靜態障礙,然後在生成的路徑上計算速度。對於動態障礙可能找不到最優解。
2、path-speed去耦求解:
首先,由最新的speed資訊評估未來的、低速的動態障礙,從而得出基於這個速度的最優path。然後生成的這個path又返回給speed計算針對新的path的最優的speed。
註意,這裏的speed不會再馬上傳給path,所以叠代不是在同一個計算周期裏進行,而是在下一個周期再進行叠代的。這裏最好想一想,理解一下。
對於高速障礙,EM采用換道而不是閃躲來處理,因此對於高速障礙,EM也能處理。至於為什麽要換道而不是閃躲,我猜測是因為閃躲對於動態障礙物的預測精度要求更高,而去耦求解的EM的預測前提是「預測都是基於當前周期的speed和path來進行的」,並不會考慮基於這個預測作出的行動會影響到障礙物的軌跡,這種互動對於高速動態障礙物來說,足夠產生無法忽略的預測偏差,導致不能進行安全閃躲。
決策和交規
EM中,為了平滑軌跡,在規劃開始之前就進行決策。
常見決策有兩種模式:
Hand-tuning decision:可以調,但受限於規模。還有可能出現超出其定義的決策規則。
Model-based decision:將車輛狀態分解成有限的駕駛狀態,用大量數據來訓練模型。
EM的決策同時采用了以上兩種模式。但說到模型應該更多在於預測模組對障礙物軌跡的預測,EM的決策目標還是提供一個大概的可選空間,決策的內容主要是換道、重用、針對每個障礙物判斷是否閃躲超車等。
更抽象來說,EM中的決策,首先將ego car的移動意圖描述成一個粗略但靈活的軌跡,在這條軌跡上評估與障礙的互動,從而保證scalable。然後,planner還會生成一個凸空間,用於在軌跡上平滑樣點參數。最後,一個二次規劃求解器依據decision生成平滑的path和speed。
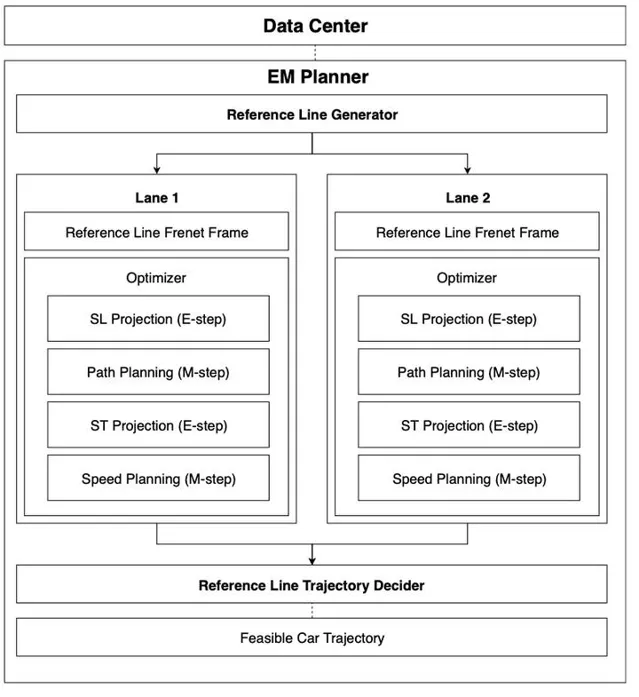
二、多車道策略的軟體架構
(EM PLANNER FRAMEWORK WITH MULTILANE STRATEGY )
首先,所有數據匯總到data center,生成車道級的參考線(帶交規和障礙物,基於高精地圖和導航資訊)。對每個車道,首先基於參考線構建F座標系,隨後所有評估均基於此。
隨後的決策和最佳化,均基於場景管理器和工作管理員進行。在一個場景下,按順序執行定義好的tasks,其中就包含各種path和speed的決策和最佳化tasks。
具體來看,經過決策後將可選軌跡空間限定縮小範圍,重構數據再傳給Optimizer(最佳化器),進行path和speed最佳化。
在path最佳化時,周圍資訊投影到F座標,最佳化的目標是在決策限定的空間內生成一條平滑的path,可以想象成閃躲障礙物往前走的遊戲,玩家需要選擇一條路線透過這條狹窄的通道,舒適又快捷地透過。
在speed最佳化時,障礙物投影到ST圖(station-time graph),同樣是為了生成一段平滑的speed profile(也就是盡量減少加速剎車)。
然後,組合path和speed,獲取該車道的平滑軌跡。
最後,所有車道的最佳軌跡匯總,軌跡決策器基於當前車輛狀態、交規、每條軌跡的成本,選擇最優軌跡。
三、車道級的EM Planner
現在分析單個車道的規劃過程。
首先,叠代是發生在不同的cycle之間。計算新軌跡是基於上一個周期計算的軌跡結果來開始的。
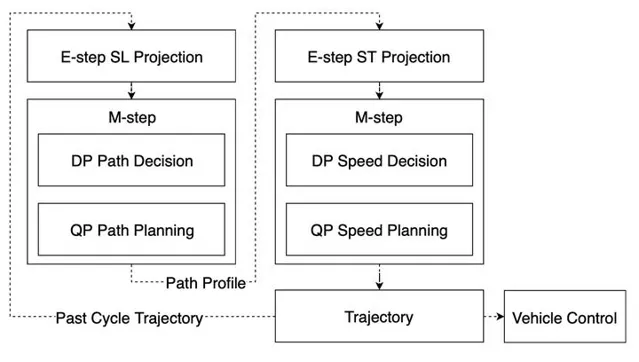
- SL投影:
障礙物投影到F座標。
直接透過Cartesian-Frenet 轉換(笛卡爾座標到F座標)。
在Apollo中透過障礙物移動軌跡描述,結合上一個cycle計算得到的軌跡,可以評估動態障礙物和ego car之間的在不同時間點的位置關系。其中兩者重疊的部份會被標記在F座標中。
(由於動態障礙物往往會導致閃避nudge,所以SL投影裏只會考慮低速和靠近中的障礙物)
2. ST投影:
根據生成的path,將所有障礙物(包含高速的)投影到station-time frame,這個ST圖是基於參考線做的,但無論是障礙物的軌跡,還是自車的軌跡,都是基於每條path來儲存及對比是否重疊的以及何時重疊的。
如果障礙物軌跡與規劃軌跡重疊,便標記出這個區域。
3. 兩個M-Steps:
透過動態規劃獲取一個rough solution(從此獲取障礙物策略:閃躲、讓道、超車等),然後基於此決定二次規劃樣點最佳化器的凸空間主體(a convex hull for the quadratic-programming-based spline optimizer)。
(雖然所有計算都基於凸空間——內部所有點的連線線都在空間內——但實際上最優軌跡在非凸空間裏。)
4. 以上模組再詳細來分析一下:
A. SL and ST Mapping (E-step)
SL投影基於G2(continuous curvature derivative) 平滑參考線。
在笛卡爾座標系,障礙物和自車狀態透過定位和朝向(x,y,θ) ,車道曲度及曲度變化率(κ, dκ) 來描述。
在F座標下,這些資訊轉換成(s, l, dl, ddl, dddl) ,即station、lateral及它的導數。
靜態障礙物與時間無關,因此座標轉換能直接進行。
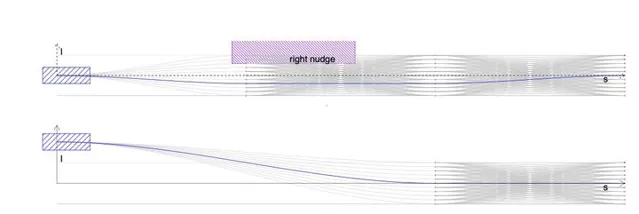
動態障礙物的座標轉換需要上一次計算出的自車軌跡。首先自車軌跡投射到F座標,獲取the station direction speed profile(提供自車在某個時間點的station座標,從而評估與動態障礙物的相對關系)。自車station座標與障礙物軌跡重疊部份就可以計算出來,如下圖紫色部份:

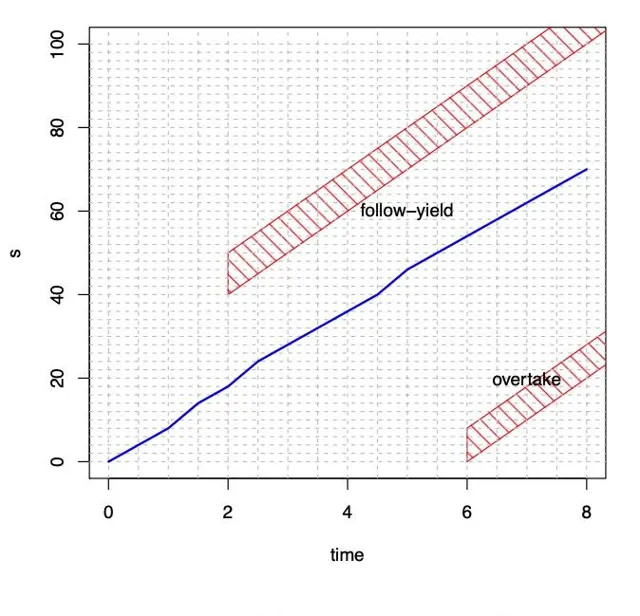
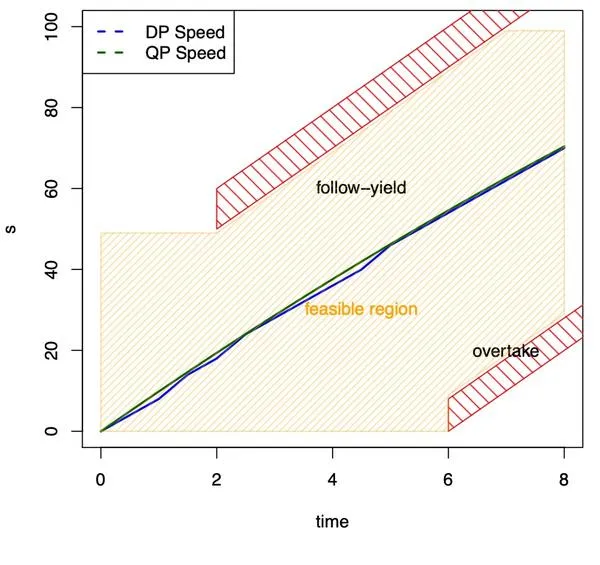
ST投影能幫助評估自車的speed profile。
當path投影到F座標後,若障礙物軌跡會跟自車產生互動,就會在圖上顯示。
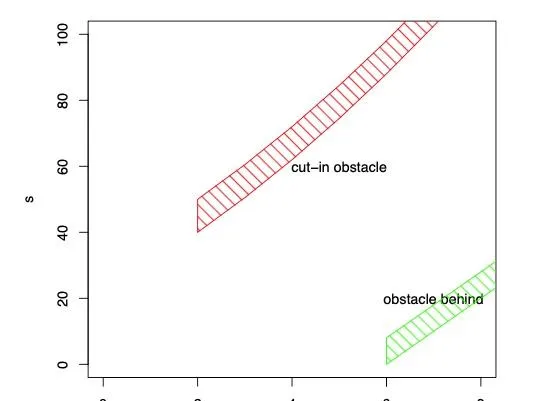
上圖中,一個障礙物在2秒後駛入自車道40m前;空白部份就是speed profile的可選空間。
B. M-Step DP Path
尋找橫向座標 l = f(s) 的最優解(在SL空間中基於station座標計算),包含兩步:
- 動態規劃
- spline-based 規劃
(但實際上Apollo 6.0之中,path的DP過程被簡化成獲取粗略可選空間的path boundary,並不需要復雜的cost函式最佳化求解過程。)

包含cost計算、lattice采樣、動態搜尋。其中lattice采樣需要在自車前獲取數row的點,不同row的點平滑連線。row裏撒點的間距由速度、道路結構、換道等決定,可以自訂。距離覆蓋8秒或200公尺。
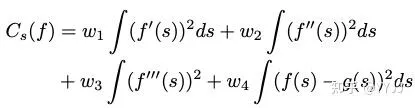
Lattice建立後,每個圖邊緣透過cost函式評估——基於SL投影、交規、車動態資訊。總edge cost函式是「平滑性、避障、車道成本」的線性組合。

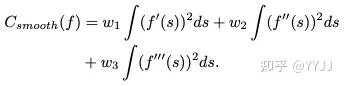
平滑cost函式中,f ′ (s)代表車道與自車的偏差角, f ′′ (s)是車道曲率。w則代表不同項的權重。
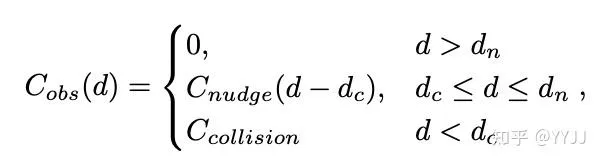
障礙物cost函式,與障礙物距離d大於設定的安全值dn時為0,小於碰撞距離dc則是無窮大。

參考線cost,代表與參考線的距離成本,其中g(s)是參考線函式。
C. M-Step Spline QP Path
QP的目標,是在DP產生的path可選空間中,透過QP spline solver對由線性化約束的目標函式進行最佳化,在其內生成一條平滑的path。

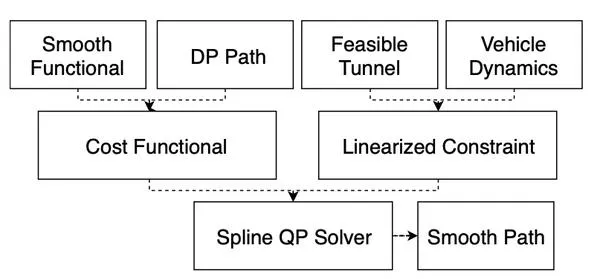
QP的目標函式是平滑cost和guidance line cost的線性組合。後者用到的比較項是DP產生的可選空間裏的大量path,用於評估障礙物的閃避距離。然後透過最佳化找最優解的方式,找出其中cost最低,也就是最優的path。
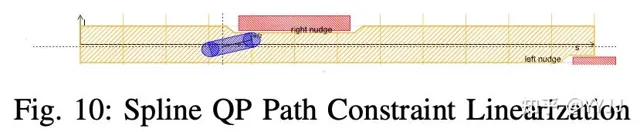
由於車輛的朝向會影響車輛邊界與周圍的位置關系,也就是需要確定車輛四個角與station點的關系,而不只是l=f(s)。

這樣就需要知道車頭朝向,其他三個角類似。
邊界的cost函式都可以進行線性化處理,隨後就可以用二次規劃快速求解。
D. M-Step DP Speed Optimizer
DP在ST圖裏生成speed profile。包含cost函式,ST圖柵格,動態搜尋。
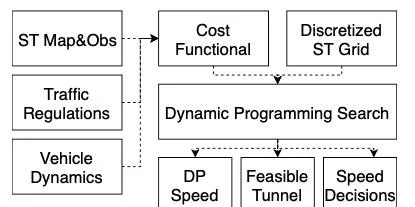
具體來說,首先障礙物資訊分散到ST的柵格中,柵格根據間隔dt平均劃分,速度的具體參數大概可以認為:

目標函式是令cost最低:
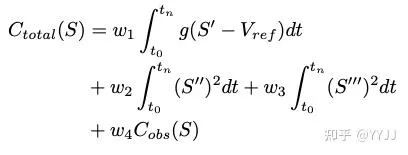
Vref 是參考速度,一般是車道的限速。第一項代表維持速度的cost,其後兩項代表平滑性,最後是障礙物cost——自車與所有障礙物的距離。
E. M-Step QP Speed Optimizer


其中必須滿足的邊界約束:

平滑擬合的速度曲線:
F. Notes on Solving Quadratic Programming Problems
基於安全考慮,Apollo EM評估的點約100個,約束條件大於600個。
QP中計算結果包含3到5個多項式,約30個參數。
因此二次規劃的目標函式較小而約束較多,求解較容易。同時為了加速計算,采用上周期的結果作為計算起點(hot start),平均3ms就能得到結果(看算力)。
G. Notes on Non-convex Optimization With DP and QP
DP和QP在非凸空間都有各自的不足。
DP:依賴於采樣柵格,有限的柵格數量只能給出一個粗略的DP解。即很可能不是最優解。譬如DP能得出向左閃躲的路徑,但閃躲的距離不一定是最好的。
QP:相反,QP解依賴於凸空間,因此不能脫離DP使用。譬如,沒有DP的decision,QP無法決定該怎麽走。
DP+QP:將各自的不足最小化。先找一個粗略的解,再在這個凸空間裏找最優。
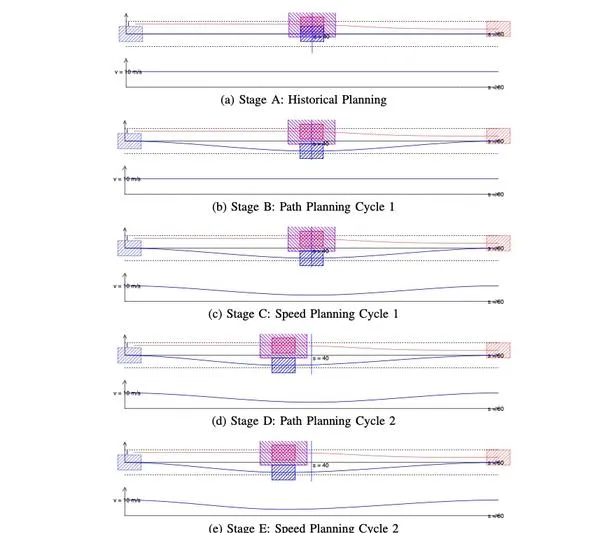
四、 CASE STUDY
根據初始速度計算交匯點,然後得出path,同時根據約束計算speed,speed更改後交匯點發生變化於是重新計算path,根據新的path重新計算交匯之後的speed(交匯之前的若也變化,那這個叠代就需要不斷進行了)。
五、算力
COMPUTATIONAL PERFORMANCE
本來的三維問題(station-lateral-speed)分解成兩個二維問題(station-lateral和station-speed),因此計算復雜度大大降低。對n個障礙物,M條備選path和N條備選speed,計算復雜度是O( n(M+N) ) 。
六、結論
EM planner是一個輕決策演算法,與其他基於大量規則的演算法不同,無需提前預估障礙物之間的相互影響,也不會因為規則變多導致找不到合適軌跡而規劃失敗。
安全性和透過性互相矛盾,安全規則增加後,可選的路徑就會減少,而且很容易導致走到一半的換道突然被中斷,而EM Planner則更可能保持連貫性,且得到可用的軌跡。
EM的計算復雜度較低。
EM已在北京和CA實地測試過,截止20180516,跑了3380小時、68000公裏。並在仿真環境跑了10w小時和100w公裏。
以上是論文的結論。
EM Planner整個框架能處理L4的自動駕駛場景,而且采用場景管理和任務管理,在去耦的角度看處理的也比較好,將三維問題分解成兩個二維問題,是這個演算法最大的特點了。整個演算法中,最核心的部份在於要理解Cost函式的構造和求解。之後我會寫關於這方面的學習備忘。











