2020雲棲大會於9月17日-18日線上上舉行,阿裏巴巴高德地圖攜手合作夥伴精心組織了 「智慧出行」 專場,為大家分享高德地圖在打造基於 DT+AI 和 全面上雲架構 下的 新一代出行生活服務平台 過程中的思考和實踐,並重點分享了「高精地圖、高精演算法、智慧時空預測模型、自動駕駛、AR導航、車道級技術」等話題。
「高德技術」知乎號把講師分享的主要內容整理成文並陸續釋出出來,本文為第2篇。
阿裏巴巴高級地圖技術專家王前衛分享的話題是 【AR&車道級導航技術演進與實踐】 。他為大家介紹了這些領域的核心技術、階段成果及未來方向。
王前衛主要分享了三部份的內容:
以往,高德透過全球衛星定位系統和數位化的電子地圖為使用者提供了一款道路級的導航服務,幫助使用者方便快捷的到達目的地。現在透過引入更能理解環境,感知環境的視覺感知系統,以及透過引入更貼近現實,更精細的車道級數據,為使用者精心打造了一款基於實景的 車道級導航產品 。它能為使用者帶來一種全新的導航體驗,做到所見即所得。
這款產品包含哪些功能呢?AR導航透過視訊增強技術實作了引導資訊與現實世界更完美的貼合,為使用者提供簡單易懂的方向性指引。這樣使用者再也不會因為走到復雜路口而走錯路;在距離路口較近,且使用者行駛在非正確的車道上時,高德AR導航也能進行及時準確的變道提醒;在路口等紅綠燈的時候,幫助使用者即時觀察周邊環境,及時提醒使用者,紅燈已變綠燈,或者前車已經啟動。AR導航功能一經上線就獲得了使用者的好評。
核心技術揭秘
高德AR導航需要具備三方面的能力:
環境即時感知
在環境感知上,高德AR導航選擇了成本較低但目前使用廣泛的視覺技術,透過深度學習演算法來感知周圍的環境。其中 最大的挑戰在於如何設計一款輕量化的深度學習模型 ,既能在低算力的裝置上即時執行,同時能保證較高辨識精度。高德主要在三個方面進行了最佳化:
第一,在數據上,高德采用了海量多源大數據的融合和提取來保證訓練樣本的多樣性和覆蓋度;第二,在演算法上,主要透過最佳化網路模型,特征共享等方法來保證演算法的準確度;第三,在效能上,透過知識蒸餾,模型的量化演算法,多工的跟蹤等方法來保證在低算力上能流暢執行。

高精定位
GPS定位精度不足,訊號幹擾大,特別是在遇到城市森林或者是天氣不好的時候,會產生訊號漂移、精度無法保證。目前精度不足已經成為大多數導航產品使用者體驗提升的瓶頸。基於此,高德提出了一種基於 雲端一體化視覺定位技術 ,基於端上影像,結合雲端檢視大數據,透過神經網路回歸出裝置絕對位姿。與此同時,透過端上辨識車道線、道路邊沿等標識,進行相對定位。最終結合時空一致性,進行雲和端的融合,大幅提升了定位精度,將定位誤差提升了一個數量級。

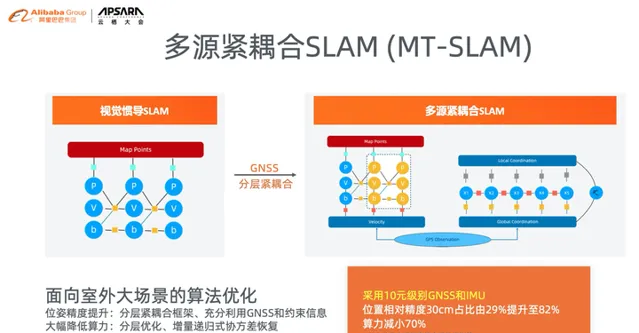
在沒有網路的時候,如何使用高精度定位呢?基於成本較低的GPS、慣導和視覺傳感器,高德設計研發了 多源緊耦合SLAM(MT-SLAM) 技術,透過演算法的深度融合實作低成本高精度的位置姿態估計,為高精地圖眾包采集、車道級AR導航等業務提供很好的能力支撐。其相對位置精度30cm占比在82%以上。
位置姿態的提升,主要是根據GNSS不同資訊的精度特性,采用分層緊耦合的融合框架,對資訊充分利用,同時考慮運動約束,在減少最佳化維度的同時也提高精度;根據實際場景的精度特點,縮減內層最佳化物件,來提升最佳化效率;根據共變異數套用場景,采用增量遞迴的方式提升共變異數恢復效率。
在實際的使用者場景中,定位遇到的環境是比較復雜的,在實作方式上,有的是基於手機RTK技術,有的是基於視覺傳感技術。在不同場景下,有的需要標準精度定位,也有的需要高精度的定位能力。
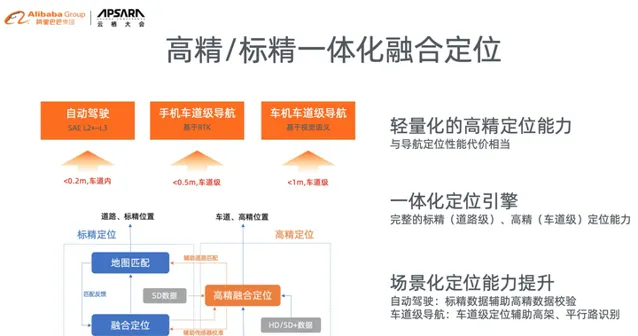
如何降低成本,提升效率,以成本最小化的方式來實作一體化定位技術套用和落地呢。高德設計了一套 高精/高標一體化融合定位系統 。基於成熟的差分衛星定位或環境語意資訊,構建輕量化的高精定位能力,並且和標精的導航定位結合形成一體化的融合定位引擎,滿足自動駕駛、車道級導航等不同業務的需要。
一體化定位引擎,已具備完整的道路級標精、車道級高精定位能力,高精、標精定位結果獨立輸出又相互關聯,為導航和自動駕駛聯動提供便利,確保在全場景下的定位結果輸出,保證定位連續性。
道路數據的精細化表達
現在有了車道級高精的定位,也有了對周邊環境的即時感知,最後還需要考慮的是如何把標準精度數據表達得更加精細,如何透過建立道路模型,使引導資訊的表達更加貼近現實場景。
大家首先能想到的是透過高精數據。高精數據的厘米級精度,確實能更真實的反映真實世界。然而,為了追求低成本,高覆蓋,高德選擇了利用標準數據精度,加上道路內容資訊,透過演算法來構建高精道路數據模型。

高德主要透過兩個方面來進行模型構建, 一是道路的模型 ,主要是利用SD的形點數據,結合道路的車道內容資訊,透過對路口的切分、建模、還原等演算法來建立道路的三維模型。 二是實景中的引導資訊展示 ,主要利用規劃路徑資訊和引導資訊,結合即時的道路影像特征提取資訊,再加融合的高精定位,在不同的場景下來分異位建對應的引導線模型。
目前高德的這套模型構建演算法,已在實際計畫中落地。其車道級三維模型已經能夠很好的反映真實世界,更加逼近現實世界;其AR導航的指示引導的鋪路線和引導線,在絕大多數場景已經做了和實景道路的貼合。











