做為汽車主動安全的主要手段,ADAS承載著自動駕駛第一步的重任,目前ADAS功能的第一步都是感知,也就是感知車輛周邊的負責的路況環境。在這個基礎上才能做出相應的路徑規劃和駕駛行為決策。目前感知所采用的傳感器包含:各種形式的雷達、單目網路攝影機、雙目網路攝影機等,或是由這些傳感器進行不同組合形成的感知系統,而這些傳感器件各有利弊,傳感器融合是大勢所趨。在這其中,網路攝影機作為不可或缺的傳感器之一,透過采集前方道路影像,實作車道線障礙物以及行人檢測ADAS功能。關於ADAS網路攝影機選用有哪些講究,單雙目方案存在哪些差異,談一談我的看法。
ADAS網路攝影機成像哪些要求?
根據ADAS檢測需要,網路攝影機在選擇時需要具備下面三個特點:
一是要看得足夠遠。 看的越遠就能有更加充裕的時間做出判斷和反應,從而避免或者降低事故發生造成的損失。這類網路攝影機關註的參數是焦距,焦距越長看的會越遠。但是焦距越長,帶來的問題是視角越窄,所以需要折衷考慮。
二是要求高動態。選用具有高動態範圍的黑白相機,可以有效抑制光暈現象,並有效增強暗處的細節,從而提高成像品質。另外, 彩色影像在鏡頭表面進行了鍍膜或分光的帶透過濾光譜,雖然提升了人眼的感知體驗,但實際上降低了訊雜比或者說資訊量。這對後續的影像處理不利。
根據這些要求,很容易發現目前行業裏的一種炒作現象。很多車上使用的智慧硬體多是行車記錄儀、雲鏡等產品,會在原來成像系統的基礎上添加ADAS功能,其實只是廠家賺取噱頭的方式。
因為行車記錄儀的目的是記錄車輛周邊的狀況,看的越清晰越好、越全面越好,即「人友好」。這就需要成像系統具有超高的分辨率、超好的色彩還原性、超大的廣角鏡頭,視角增大意味著焦距的縮小。這與ADAS對成像系統的要求截然相反,ADAS要求的影像品質是「機器友好」,因此在行車記錄儀的成像系統基礎上開發ADAS功能是不切實際的。目前很多號稱有ADAS功能的行車記錄儀,一般都只有車道線檢測這一個功能。有的雖然有別的如碰撞預警的功能,但是使用者體驗極差。
單 / 雙目的測距原理區別
目前網路攝影機ADAS有單目和雙目兩種方案,兩者的共同特點,就是透過網路攝影機采集影像數據,然後從影像數據上得到距離資訊。ADAS一個很重要的作用是碰撞預警。碰撞預警需要關註距離的變化,需要估計即將碰撞的時間。有了距離測量,才會有距離變化,有距離變化才會有碰撞時間的估計,最後才會有預警。
單目網路攝影機的大致測距原理,是先透過影像匹配進行目標辨識(各種車型、行人、物體等),再透過目標在影像中的大小去估算目標距離。 這就要求在估算距離之前首先對目標進行準確辨識,是汽車還是行人,是貨車、SUV還是小轎車。準確辨識是準確估算距離的第一步。要做到這一點,就需要建立並不斷維護一個龐大的樣本特征資料庫,保證這個資料庫包含待辨識目標的全部特征數據。比如在一些特殊地區,為了專門檢測大型動物,必須先行建立大型動物的資料庫;而對於另外某些區域存在一些非常規車型,也要先將這些車型的特征數據加入到資料庫中。
如果缺乏待辨識目標的特征數據,就會導致系統無法對這些車型、物體、障礙物進行辨識,從而也就無法準確估算這些目標的距離。導致ADAS系統的漏報。
而雙目檢測的方式就是透過對兩幅影像視差的計算,直接對前方景物(影像所拍攝到的範圍)進行距離測量,而無需判斷前方出現的是什麽型別的障礙物。所以 對於任何型別的障礙物,都能根據距離資訊的變化,進行必要的預警或制軔。
雙目網路攝影機的原理與人眼相似。人眼能夠感知物體的遠近,是由於兩只眼睛對同一個物體呈現的影像存在差異,也稱「視差」。物體距離越遠,視差越小;反之,視差越大。視差的大小對應著物體與眼睛之間距離的遠近,這也是3D電影能夠使人有立體層次感知的原因。
圖中的人和椰子樹,人在前,椰子樹在後,最下方是雙目相機中的成像。可以看出右側相機成像中人在樹的左側,左側相機成像中人在樹的右側,這是因為雙目的角度不一樣。再透過對比兩幅影像就可以知道人眼觀察樹的時候視差小。而觀察人時視差大,因為樹的距離遠,人的距離近。這就是雙目三角測距的原理。雙目系統對目標物體距離感知是一種絕對的測量,而非估算。
單 / 雙目方案的優勢與難點
單目的優勢在於成本較低,對計算資源的要求不高,系統結構相對簡單。其缺點在於必須不斷更新和維護一個龐大的樣本資料庫,才能保證系統達到較高的辨識率;無法對非標準障礙物進行判斷;距離並非真正意義上的測量,準確度較低。
雙目系統成本比單目系統要高,但總體可接受但尚處於可接受範圍內,並且與雷射雷達等方案相比成本較低;二是沒有辨識率的限制,無需先進行辨識再進行測算,而是對所有障礙物直接進行測量;三是精度比單目高,直接利用視差計算距離;四是無需維護樣本資料庫,後期維護工作量小。
雙目系統的一個難點在於計算量非常大,對計算單元的效能要求非常高,這使得雙目系統的產品化、小型化的難度較大。所以在芯片或FPGA上解決雙目的計算問題難度比較大。國際上使用雙目的研究機構或廠商,絕大多數是使用伺服器來進行影像處理與計算的;也有部份將演算法進行簡化後,使用FPGA進行處理。目前,中科慧眼在芯片上的計算效率已經達到15fps,在FPGA+ARM架構上的計算效率達到了40fps。
另一個難點在於雙目的配準效果。透過雙目網路攝影機的影像配準可以計算生成表示距離的二維影像。下圖是中科慧眼雙目方案對實際場景資訊采集與計算得到的距離的對應關系,不同飽和度顏色代表不同距離,從暖色調至冷色調為距離由近及遠。在計算過程中,需要對噪點與空洞做很好的抑制。從右圖可以看出,色調(距離)是平滑過渡,沒有跳變。
一些FPGA方案中有很多噪點與空洞,對後續計算不利,存在安全風險。對於小障礙物的辨識,既要做到沒有雜點和空洞,又要表現細節。否則比如一條橫著的欄桿無法辨識,會增加駕駛的風險。下面的圖表現的是小物體和行人的探測的效果圖。
 (上圖為實景圖)
(上圖為實景圖)

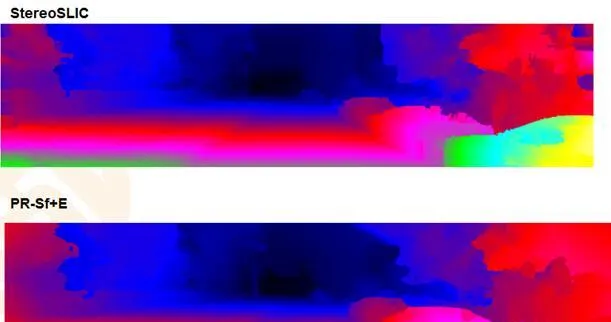
(Our為中科慧眼演算法效果、其它為國際流行傳統方法的處理效果)
小結
因為檢測原理上的差異,雙目攝影機在距離測算上相比單目是存在一定優勢。隨之帶來的硬體成本和計算量級的加倍,是難關也是突破口。就想谷歌自動駕駛汽車在積累大量的經驗和使用數據,才有可能一步步積累實作自動駕駛。中科慧眼的雙目產品樣機已經完成,也正在進行大規模路測。從產品理論技術原型走到真正被使用者接受的產品,還有很長的路要走。











