这题我会,先讲一下"看到"红绿灯的难点。
难点1:小物体检测
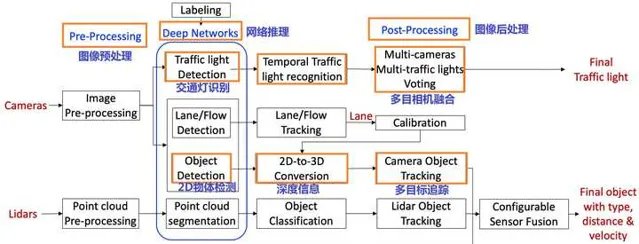
红绿灯检测属于 小物体检测问题 ,在一副图像上所占的像素比极小,并且不同于车辆,行人的检测,红绿灯所能提取的特征有限,基本上是颜色特征,这个对设计 神经网络的特征提取 提出极大的挑战。还需从其它角度考虑,如红绿灯的位置始终在高处,红绿灯的时序信息等去判断;另外对于相机的选型也有要求,选择fov小的,聚焦功能好,所检测的距离远,但视野范围小;选择fov大的,视野范围大,但检测距离近,所以可能会配合两个甚至多个不同fov大小的相机来检测红绿灯,这又会涉及到 多个相机融合 的难点问题。
难点2:红绿灯实时变化
虽然跟交通标志牌类似,都属于静态物体检测,但红绿灯的状态是 实时发生变化 的,这提升了检测的难度。此外,在不同光照条件下,红灯和黄灯的 相似度很接近 ,甚至人眼都难以区分,只能根据灯的位置信息来区分。另外不同地区的 红绿灯设计方式 ,展现形式不一样,如天津地区的条形展现形式,这就对红绿灯的数据采集提出更多的挑战,要覆盖更多场景,增加了采集成本,同时对检测网络提出了更高的要求,具备更强的泛化性。

难点3:红绿灯的倒计时
红绿灯还会有 倒计时 的问题,在检测到红绿灯状态的同时,对数字的倒计时同样需要进行检测。此外同一个交叉路口,存在多个 不同状态下的红绿灯 ,对这么多类型的红绿灯检测,就算是人可能也没办法区分清楚,需要配合一定的经验。而对于机器来说,它需要的是短时间能做出判断,难度极大。
 复杂的红绿灯路口
https://www.zhihu.com/video/1411668461311954946
复杂的红绿灯路口
https://www.zhihu.com/video/1411668461311954946
难点4:红绿灯的漏检和误检
难点4:仅凭感知层面的红绿灯检测是远远不够的,一容易误检,漏检,这对决策规划层有极大的影响,红灯识别成绿灯,继续往前开,想想都是很危险的。所以需要结合高精度地图,以及V2x技术来解决,一方面高精度地图提供当前的车所在的车道信息和距离红绿灯的远近信息,V2x技术可以感知车辆红绿灯的状态信息,再配合感知检测的备份冗余,才能准确的实现红绿灯的检测问题。
实现方案:
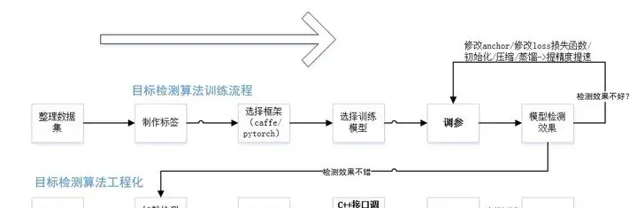
通过感知去识别红绿灯,有一种舍身取义的感觉, 效果一般,适应性差 ,条件允许的话(如固定园区限定场景),该装V2X就装V2X,多个备份冗余, V2X > 高精度地图 > 感知识别 。若碰上GPS信号弱的时候,感知识别可以出场了,大部分情况,V2X足以Cover掉大部分的场景。感知方案的具体实现参照文章,主要为 红绿灯数据集采集,标签处理,检测模型训练,算法部署,追踪后端优化,接口开发 ;
总结:
所以可以看出,在我们日常生活中不起眼但是在城市道路不可或缺的红绿灯,要达到量产级别的检测识别,难度是相当大的,涉及到 不同地区的场景 , 光照条件的影响 , 多种技术 (高精度地图/V2x/感知)的融合 多相机的融合 等,难度远远超过车辆行人的检测,所以红绿灯问题难度大,棘手,又是在复杂城区智能驾驶不可回避的一个问题。
通过单车智能的方式去感知红绿灯难度太大,而且不能保证100%的识别成功率,红绿灯的误识别后果影响很严重,所以智能交通基础设施建设需要及时跟上,包括 红绿灯的智能化、动态道路分配、智能路网设计 等;这就需要得到城市政府部门的支持,能够获得城市路网的检测数据,同时对获得到数据的分析能力,高频次的流动车的数据,位置信息,需要极佳的信号灯控制算法及产品才能把优势发挥出来。
效果:



 单车智能识别红绿灯
https://www.zhihu.com/video/1411668565238353920
单车智能识别红绿灯
https://www.zhihu.com/video/1411668565238353920
 百度Apollo识别红绿灯方案
https://www.zhihu.com/video/1411668662986649600
百度Apollo识别红绿灯方案
https://www.zhihu.com/video/1411668662986649600











