「這些車的自動駕駛系統太TM糟糕了」
這句話,是美國汽車AAA協會的技術大佬們在一次測試後,發出的牢騷。
這些年,自動駕駛產業無人不曉的【加州自動駕駛脫離報告】已經火出圈。然而,美國汽車協會(AAA)每年最具現實意義的汽車系統橫評報告,卻鮮少有人關註。
自2015年底,美國加州機動車管理局(DMV)要求州內所有中外測試企業送出一份「脫離」報告以來,這份年度報告便一直被當做各家技術能力的權威評價參考。
然而,我曾經在2019年的分析中詳細解釋過,盡管【加州脫離報告】涵蓋數據指標非常豐富,特別是MPI/MPD(指代「無人車每行駛多少裏程需要人工幹預一次」)這項指標,對衡量技術水平頗為重要。
但這些數據並非強制,都由企業自發上報,這無形給予了可操作空間。當初國內部份無人駕駛企業為了提高排名的造假門事件,曾引起圈內私下裏的哄笑——「想必L4到底什麽水平,只有工程師們心裏清楚」。
另外,從具體指標來看,僅時間跨度與路測環境,彼此敘述詞差別巨大(反正你也猜不出誰撒了謊),更不用說車隊規模、車型、系統叠代以及偵錯情況都不盡不同。
因此,
它在公信力方面存在很多問題,更不能證明自動駕駛整體技術到底達到了什麽水平
。
另一邊,隨著自動駕駛輔助系統(L2級自動駕駛)逐漸成為各大品牌中高端車型的標配。2017年以來,從消費者端發起的測試與評價層出不窮。
其中,在美國車主群裏威震八方的美國汽車協會(AAA)從2018年開始,便一直在各種封閉與開放場景中,利用專業檢測器材,對消費級汽車品牌的自動駕駛輔助系統(約L2水平)的各項元件做橫向評估。
2022年5月,他們釋出的一份小規模L2系統橫向試驗,雖沒有引起格外的關註,
但卻將3家車廠的L2技術水平,置於統一且嚴謹的環境與配置條件下。
當然,一些結果也許在很多人意料之中,
橫評的車廠品牌也只有3個,但實操細節和很多數據卻更具備現實上路的參考性。
這次,我們就是要來說一下這份並不出名的報告——
【主動駕駛輔助系統(L2)評估報告】。

當然,AAA釋出這一報告的目的,主要是想幫協會的車主們更清醒地認識目前汽車ADAS配置的安全水平。但另一方面,報告其實也反應了當下汽車消費者的態度:
「狼來了」的故事,第三次聽時就會不再有吸重力。
很明顯,你可能已經猜出了這份報告的大致測試結果:
L2自動駕駛系統,對,就是你車上那個,仍然相當糟糕。

這是一項針對不同汽車品牌L2系統的橫評測試,意味著做一個相對公正客觀的「對照組試驗」,要保持測試條件的一致性,並使外界變量盡可能控制在最小範圍。
因此,AAA從測試車型、測試器材(采用了英國老牌OxTS公司的RT3000器材,這家是自動駕駛測試Top企業)、數據采集維度,再到開放道路測試條件的選擇,都執行了嚴格的標準。
舉個例子,他們在選擇裝有ADAS系統的車型方面,采用了4個標準。並在測試前,為每輛車做了嚴格的第三方檢查測試,證明 ADAS 系統符合SAE(美國汽車工程協會)的L2系統定義,可以正常執行。
值得註意的是,之所以選擇2020年這個時間節點,
是因為這一年是ADAS系統市場滲透率取得突破且技術套用已經成熟的一年
。根據統計,
2020年34%的車型中,ADAS系統成為標配或可選
。
最終,基於以上要求,AAA選擇了
2021版現代聖達菲(高速公路輔助系統HDA)、2021版斯巴魯森林人(輔助駕駛系統EyeSight)以及特斯拉Model3(自動駕駛輔助系統Autopilot 10.2)。

從上到下分別是現代聖達菲、斯巴魯森林人、特斯拉Model3。這些並非真實測試車,僅供車型參考
三輛車雖然總共經歷了60多場測試,但其實只是回答了兩個設定的命題:
A、當配置有L2系統的轎車與
另一輛載人轎車
發生碰撞時,其表現如何?
B、當與騎單車的人發生碰撞時,配置有L2系統的車輛表現如何?
很明顯,A在高速公路上最為常見。
在高速公路環境中,我們經常會遇到緩慢或停滯的交通。有時候,前面的車輛會突然無預兆的減速或停止,而L2系統中的ACC(自適應巡航)等元件便為此而生,通常應對良好。

與三輛測試車演「對手戲」的是扮演小型乘用車的全自動機器人Soft Car 360,由自動化測試系統小巨頭AB Dynamics提供,是歐盟新車安全評鑒協會認證的「汽車安全檢測目標物」。
而B,可能會喚起不少自動駕駛技術愛好者的
些許記憶
。
沒錯,2018年
讓Uber自動駕駛自此身敗名裂、無疾而終
的車禍致死事件,便是一個極為類似的場景。
值得註意,AAA把這類單車、摩托車以及行人稱為
「弱勢者道路使用者」
,這一類涉及的事故大多被產業內歸為邊緣案例。但他們對於提升自動駕駛系統在城市環境中的應對能力十分關鍵。

主動車輛安全平台4activeSystems提供的單車機器人,整合了網絡攝影機、雷達等傳感器,可以采集測試要求的各項數據,常用於自動駕駛專業測試
迎面飛車,束手無策
我們首先來看研究員專門為 A 場景設定的兩組測試:
A1、面對同一車道前方的慢行車(跟車),系統會有什麽表現?
在測試車前方,「對手車」處於同一車道,以同方向加速到20英裏/小時向前行駛。同時,它需要在距離測試車1700英尺的地方保持至少10秒行駛時間;
而後方,測試車輛將在車道內加速到55英裏/小時,L2系統必須在這個速度下啟動。
A2、面對迎面而來,突然沖進同一車道的車輛,系統會怎麽做?
美國的高速公路通常由兩車道公路組成,相鄰車道上迎面而來的車輛沒有分隔障礙物。在這種環境下,迎面車輛可能會因超車或駕駛員失誤等原因進入對面車道。
從歷史數據來看,這種類別的碰撞往往是最嚴重的。
譬如,2021年11月發生在加州布雷市的一起Model Y車禍,便是車主因誤入車道導致迎面相撞,雖無傷亡,但車輛嚴重損毀。
測試車與機器人的車速分別設定為25英裏/小時與15英裏/小時。
必須註意的是,由於相關限制,這些速度絕對低於現實車禍中的平均速度。
因此,研究人員推測,
評估結果代表了現實中出現的最好情況
。

實驗地選擇了AAA參與營運的GoMentum Station自動駕駛測試場。這裏的測試區域大約長0.7英裏,由一條中間用白虛線分隔的雙車道組成。
為了保證實驗結果沒有較大起伏,三輛車必須分別做5次實地測試。最後,三個不同品牌L2系統的A1結果並不出人意料:
5次測試均表現良好,均成功檢測到目標車輛,減速後保持了安全跟隨距離。
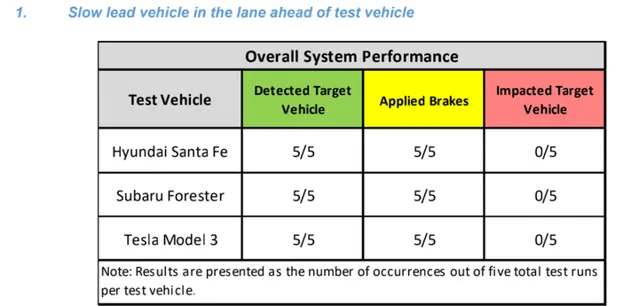
5次均未對目標物產生影響
這也驗證了過去兩年很多相關研究結果——
ADAS系統的自適應巡航控制(ACC)功能在自然環境中的跟車表現一直不錯。
值得註意的是,沒有一輛車在15次測試中提供AEB(自動緊急剎車)警告,AAA認為,這表明所有ADAS系統均對目標車輛做出了適當響應;
不過,斯巴魯森林人雖然檢測到前車,但從數據來看,啟動剎車最晚,因此相比之下剎車會相對猛烈一些。
然而,在
A2場景
下,
測試結果可以說是「全軍覆沒」也不過分
。
即便迎面駛來的車輛行駛速度緩慢,但現代聖達菲與斯巴魯森林人在5次試驗中,全部沒有檢測出目標車輛。因此,在每次接近目標車輛過程中,
它們沒有剎車,在沒有減速的情況下
與目標車發生碰撞。
很明顯,這表明在沒有駕駛員幹預的情況下,ADAS系統無法充分應對這種情況。

而特斯拉 Model3 的 Autopilot 顯然在這個場景的對比中,
勝出
。
在5次測試中,Model3每次都能檢測到接近的目標車輛,並在縱向距離上使用剎車,
雖然最終也不可避免產生撞擊
,但卻明顯降低了撞擊速度。
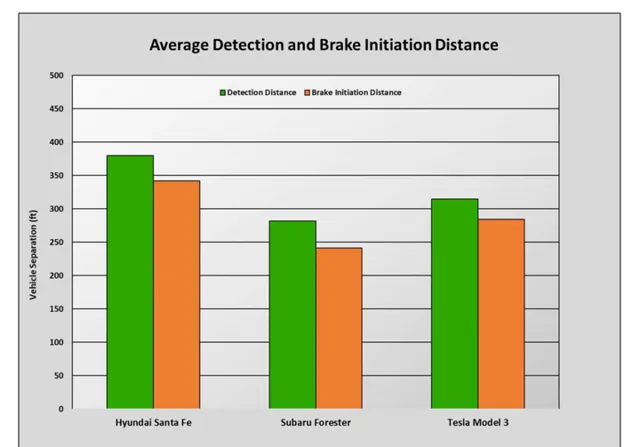
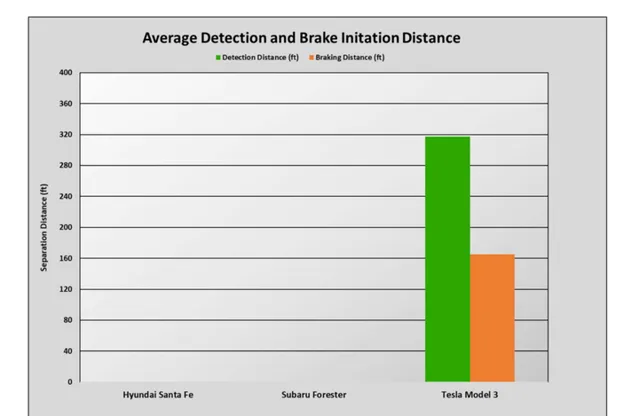
不過,雖然Model3的平均檢測距離為317.3英尺,
但平均2.89秒後才啟動剎車
。這與其在A1場景中的表現差距較大——在檢測到車輛後平均0.42秒就開始剎車。
AAA研究員認為,檢測與制動之間的明顯延遲時間差,表明 Autopilot 在響應方面存在不確定性。
特斯拉檢測到物體並剎車減速,但仍然有撞擊
總的來看,這些L2系統在典型場景中的應對效果並沒問題,但對於「橫向方向高速變化」這類邊緣情況,則靠不住。
甚至於,由於機器人車的行駛速度過於緩慢,特斯拉的表現都不一定在實際場景中有多少意義。
在A2測試中,其他兩車檢測與剎車完全失敗,只有特斯拉有…檢測與剎車數據,但也產生了撞擊
弱勢道路使用者的麻煩
B場景關於單車假人橫穿馬路的系統測試,很容易讓人想起2018年Uber自動駕駛引發的致命車禍——一位騎單車的亞利桑那州坦佩市女子晚上10點在橫穿人行道時遭遇uber無人車撞擊,最終搶救無效死亡。
盡管在此之前國內很多工程師猜測是
由於「假陽性」問題調松了辨識策略
,但調查結果在1年多後透過正規檔披露:
一方面,無人車其實在撞擊前5.6秒發現了這位女子,
但由於錯誤分類,把行人分為「其他物體」
,沒有緊急剎車,
且Uber事故檢測和行動之間只建立了一秒鐘的延遲
;
另一方面,Uber關閉了這輛沃爾沃的原廠自動緊急制動系統,但其實無人車企業這個做法並沒有錯——避免引發系統沖突。

我們之所以提及該事故,是因為
Uber後來把「對道路弱勢群體的關註」提高了優先處理等級,采取最大限度的緊急制動來防止事故發生;
另外,在這幾年見過的自動駕駛測試中,普遍來看,自動駕駛系統一直不擅長回應那些相對脆弱的道路使用者(但不得不說,外賣小哥真的是道路炸彈啊,誰能防的住)。但無論如何,沒有專用單車道的道路比比皆是,機動車與非機動車必須共享道路使用權。
而2022年的這場B測試,再次不幸地印證了以上觀點。
B1的場景設定與A1大致相同——單車機器人在測試車道的右側前方以15英裏/小時速度穩定前行;而車道內的測試車輛,則需要被加速到45英裏/小時後,啟動L2系統。
預料之內,經過每輛車5輪測試,結果與A1沒有太大差別。所有測試車成功檢測到單車後,減速以避免與目標碰撞。
但有趣的是,竟然沒有一輛車輛試圖超越單車。
不過,三輛車L2系統之間細微的效能差別還是被發現了。
現代聖達菲在5次測試中的三次表現良好——檢測與啟動剎車系統之間保持了足夠距離,司機有充分時間被通知。然而,在第3次、第4次的測試中發生了「意外」:
研究員根據采集的數據發現,其AEB系統透過儀器盤中的通知被啟用。這對應了顯著減少的檢測距離與剎車距離,
就導致第四次測試車與單車的縱向距離幾乎為0(下圖)
。
幸運的是,單車在橫向距離上與測試車相隔3.2英寸,因此沒有發生碰撞。
但這在真實環境中無疑是存在危險的,違反了相關法規的間隙規定
。

現代聖達菲第4次表現出現問題,縱向距離為0,相當於貼身而行
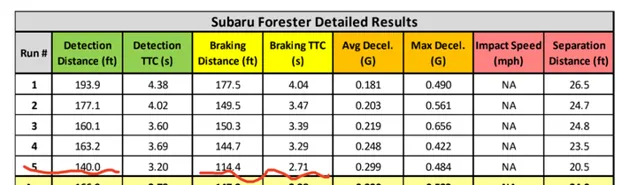
而斯巴魯森林人前四次測試同樣表現良好,但
在第五次測試中,檢測與剎車啟動時間明顯晚了
(下圖)。雖然與單車縱向距離有20.5英尺,但系統效能相對於1~4有明顯降低。
而特斯拉在5次測試中,均檢測到目標並成功剎車,並保持安全跟隨距離。
除了充足的檢測距離與剎車距離,測試車的平均減速與最大減速振幅一致
,具備逐步遞減的特點,有利於提高舒適度,這一點其他測試車有幾次可以做到。
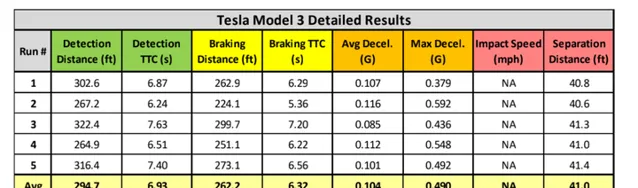
總的來說,在B1的15次測試中,差距並不明顯。但從檢測距離、剎車距離、單車與測試車之間的平均最小縱向距離來看,特斯拉表現的確更加穩定。

但B2的測試結果,差距懸殊。
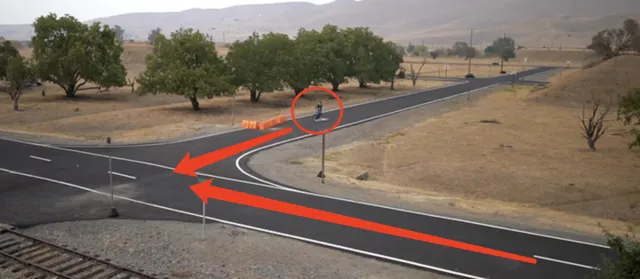
B2模擬了城市環境經常遇到的
四路交叉口場景
,是跟Uber致命車禍場景非常相似的行人橫穿式現場。
當然,盡管我們不能對L2級的自動駕駛輔助系統有太多奢望,但大多數L2系統的效能設計其實包含了這類場景。
單車假人這次要橫穿測試車車道,所以被放置在距離交叉口橫向100英尺開外(下圖)。
這次,測試車需要被加速至25英裏/小時(40公裏/小時),至少要在距離目標700英尺時就啟動ADAS系統。
你們應該能發現,這裏存在一個非常大的問題。
25英裏(40公裏)/小時的速度,很明顯要低於國內外高速公路的最低限速。
而在城市道路上,實際速度也會偏高。但由於受限於單車機器人對於最大沖擊速度的設計,測試只能采用這一行駛速度。
換句話說,
現實世界裏,L2系統效能還會遭遇更大沖擊。
測試結果顯示,現代聖達菲的5次測試都表現不錯——全部檢測到目標,並立即啟動緊急剎車。

此外,它的
檢測距離、剎車啟動距離、車與單車的分離距離在五次測試中基本一致
。研究員認為,這表明聖達菲AEB系統在特定測試速度下,對這類單車橫穿目標的響應能力是可重復的。

而斯巴魯森林人,5次測試直接跟單車發生了激烈碰撞,直接把單車撞飛。也就是說,系統未能提供任何檢測警報或剎車反應。因此,其中1、4、5測試的數據完全沒有采集到。

而第2、3次測試中由於駕駛員觸碰到了剎車板,因此不符合實驗驗收標準。但這兩次測試中,系統也沒有任何反應。


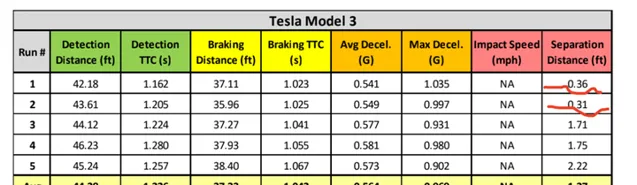
特斯拉Model3的表現也還不錯。5次測試每次都能檢測到單車並啟動緊急剎車。
不過,研究員們發現,Autopilot 第1、2測試的人車
最終距離明顯縮短
(下圖)。雖然並未發生任何碰撞,
但在特定測試速度下,特斯拉的系統在整個制動過程中的響應可能存在誤差
。
但研究員們認為,
這一觀察並不意味著Model3在檢測與緊急剎車方面的系統效能存在不良情況
。綜合數據表明這一系統具備可重復能力。
總的來看,結果非常明顯,
對於L2系統來說,對「弱勢道路群體」的檢測效果和制動靈敏度,要遠遠低於它們對同類的判斷。
特別是在平行方向的移動過程中,車輛檢測效果要明顯好於單車檢測。而現代聖達菲與斯巴魯森林人,對前方單車的響應並不穩定。

此外,在橫向交叉道路的單車測試中,雖然有兩輛車表現良好,但
另一輛車幾乎全程失靈
的事實告訴我們,這些所謂「邊緣性案例」對車廠的L2系統來說是致命的。
特別是對於國內城市道路中,人流車流摩托車流交匯,行人不守交通規則情況頻發的場景下,L2系統將會遭遇更大的挑戰。
寫在最後
雖然實驗規模不大,但在相對一致的影響因素控制下,我們可以認識到,只有A1的跟車測試是我們最想看到的結果。面對復雜環境,L2級系統明顯心有余而力不足,而試驗環境卻僅僅是現實世界裏的「底線」。
有趣的是,結合AAA在5月做的另一項測試——
DMS(司機防疲勞系統)與ADAS系統對比試驗
的結果(不巧也看了),他們得出的有利結論可能會讓渴望難度的自動駕駛工程師們產生不滿(畢竟在很多技術宅眼中,DMS並沒有什麽技術含量):
「從駕駛者安全形度出發,DMS比自動駕駛輔助系統更有用。」
無論如何,在這場多達60輪單項測試的L2試驗中,他們也發現,即使
駕駛員對系統做輕微幹涉,也會對撞擊結果產生明顯變化。
因此,他們認為,
「基於網絡攝影機的司機監控系統」(DMS)非常有必要整合到ADAS系統中
。「這可以讓非典型情況出現時,加強司機幹預能力。」
當然,他們對未來並不悲觀:「我們認為,隨著時間的推移,車輛將獲得檢測潛在可能性碰撞並尋找安全空間的能力。當然,尋找潛在碰撞,是一個當下難以解決的復雜問題。」
這場試驗並非沒有人提出質疑。
有人認為,大眾本來就不能給所謂的L2系統給予太高預期,畢竟這只是一個輔助系統;另外,面對A2與B2現場,連人類司機都不一定能做出正確判斷避免車禍;還有人覺得,除了特斯拉,其他兩個品牌的系統並不具有代表性。
甚至有人直接吐槽AAA做這個測試的意義:「他們從測試中得出的結果,僅僅是符合了SAE定義的L2標準——你必須在駕駛座上手握方向盤來監視這些能力。」
但一位網友對這個吐槽的回應非常有意思:「對那些開啟自動駕駛輔助系統後,就繼續看書、看電影、睡覺的傻X來說,這是值得不斷重復的。」
我們對此表示附議。
另外,從AAA在2022年最新的消費者統計數據來看,汽車車主其實正在變得愈加理智。現在的人們可能不太會相信「第三次‘狼來了」的故事」。
「 只有18% 的人對完全自動駕駛汽車感興趣。實際上,超過四分之三的人(77%)希望車廠把重點放在改進目前的自動駕駛輔助技術上,而不是推出一款高級別自動駕駛汽車。」
而在兩年前,相信自動駕駛到來的這個數據是55%。
所以,
如果我不信任現在,你憑什麽向我推銷未來?






