所謂的自動駕駛,實際就是一個模仿人類駕駛的行為。
人開車,遇到任何一種狀況,都需要先感知,再思考,最後行動的這麽一個過程。
而自動駕駛的感知就是來自於各種探測器材,那麽為什麽現在自動駕駛需要高畫質網絡攝影機、紅外網絡攝影機,毫米波雷達,激光雷達,超聲波雷達、聲音傳感器,GPS等定位裝置來感知。
不是不想節省,而是節省不了。
實際上,車企比我們任何消費者都想節省成本,因為成本越低他們賺得越多啊,沒有人和錢過不去。但是因為汽車作為我們消費者最常用的交通載具, 安全 絕對是放在第一位的,其中也包括 成本。
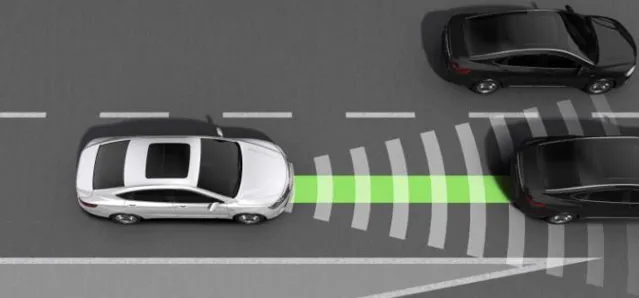
早期的ADAS基本方案就是 一個車頭毫米波雷達+一個駕駛位擋風玻璃下的網絡攝影機+車尾超聲波來答的配置 ,因為三個零部件成本不高,技術成熟,而且可以實作L2級別的大多數功能,如自適應巡航,AEB,LKA,行人保護,交通標誌辨識,倒車輔助等。

而現在為了達到更好的智能輔助駕駛,是不能模擬人的狹小視角為基礎的。感知的範圍需要覆蓋遠中近距離,車輛周圍的全部立體空間。其中即便只用一種感知器材,比如特斯拉推崇的全網絡攝影機自動駕駛模式,也必須要多個網絡攝影機來探知不同角度的周圍環境,包括能看到地面和天空,務必做到在任何駕駛中,都能杜絕盲區的出現。
因為每一種感知器材, 探測距離有長中短 ,也有 不同的FOV(視角) 的,HFOV(水平視角),VFOV(垂直視角)。
為了讓車輛擁有360°無死角的盲區,必須要覆蓋所有的方位和視角。
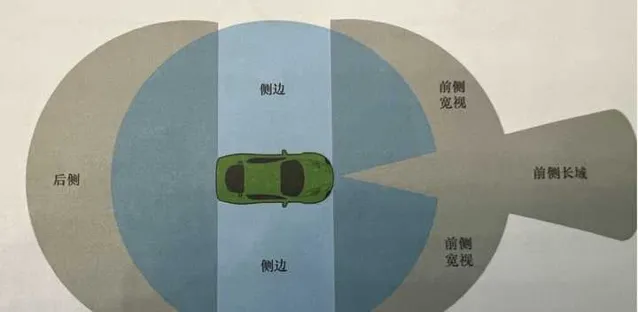
但實際上,現在主流的自動駕駛方案中,上述的每一種車輛感知的器材都有著其存在的必要,只有多個傳感器材融合,在 範圍、精度、FOV、取樣率、成本和一般系統復雜性 之間做好平衡,才能打造出一個安全的智能自動駕駛所需要的感知。
毫米波雷達
毫米波雷達的工作原理就是透過發射無線電訊號(毫米波段) ,再將反射的零散訊號收回,來探測感知周圍物體,透過演算法(閾值去掉雜訊值留下訊號能量峰值)得到反射點的資訊,再得到汽車和其他物體之間的相對距離、相對速度、角度、運動方向等。
由於毫米波雷達的穿透性較好,可以輕松穿透塑膠,所以常安裝在汽車的前保險杠處,塑膠板的裏面。
毫米波的最大優點就是無視天氣,穿透霧氣、煙塵的能力強,受到環境因素影響較小,可以保障在日常情況下的使用。
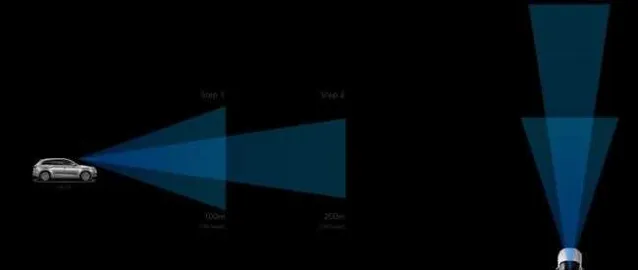
毫米波雷達早期為24GHZ,探測距離短,精度低,探測距離大概50米到100米,精度大概是40-70CM的分辨率。而最近兩年推出的77GHZ的探測距離遠,能達到200米以上,精度相對較高,大概是10-40CM分辨率。但因為成本較高,還是主要用在高端車型上,如果要達到更好的輔助駕駛級別,一般至少一個77GHZ毫米波雷達(車頭)搭配多個24GHZ毫米波雷達(車側)來使用。

毫米波雷達雖然成本較激光雷達低,工藝也成熟,元器件也小,但是它也有著 致命的缺點,那就是分辨率低,無法清晰辨別較小的物體,且對金屬極為敏感。
假設40CM一個反射點,即便是77GHZ的毫米波雷達動態掃描到車前方的人體正面,很有可能也就得到十幾個點,如果行人對於毫米波雷達還是側面的運動體態,那可能接受過來的訊號就幾個點,關鍵這幾個點旁邊還有幹擾物,比如行人從一棵樹旁邊經過,行人拖著個大箱子,要從這一堆稀疏的點上分析出這是個人還是個其他什麽玩意,要是人的肉眼,肯定是看不出來的。
如果要更清楚辨別較小物體,雷達的探測閾值需要設低,但毫米波雷達又對金屬敏感度太高,調低閾值噪點增多,這樣的結果就是會有越來越多「鬼影」的出現,會出現眾多的虛報物體。你可以理解為一個超級近視的人取下了眼鏡,想要分辨一個遠處的閃閃發光的小物體,他越努力看,就越會看到四周到處都是晃動的影子和物體,哪怕前面啥東西都沒有,他都不一定敢往前走。

所以毫米波雷達分辨大型物體(前方車輛),抗天氣幹擾能力一流,但你指望這個精度幾十厘米級的雷達能夠準確分清楚高速行駛車輛的前面是個啥玩意,肯定是不行的。因為它的一驚一乍,一路上動不動給你虛報,那麽車都不用開了,就不停急剎著玩就好了。
所以,現在 AEB裏面,越來越多的企業把毫米波雷達的權重給調低了 ,要判斷前方有沒有障礙物,是個什麽障礙物,還是得高畫質網絡攝影機點頭才行。
當然如果高畫質網絡攝影機認為前方拖著個大樹走的卡車或者沒拖貨的一個超低平板卡車,都不屬於車輛,不管毫米波雷達的內部示警,車速完全不減地撞上去,也真的純屬正常。
高畫質網絡攝影機
汽車網絡攝影機是最接近人類視覺的車輛感知外界的手段了。
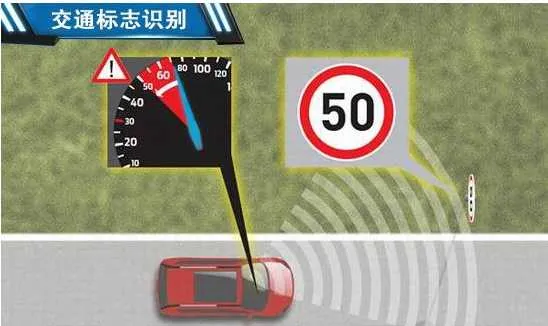
車載網絡攝影機一般都擁有較廣的垂直視場角,較高的分辨率,還能提供顏色和圖形的資訊。這就可以達到駕駛輔助中的行人、單車、機動車等的辨識。也可以分辨出路標,如路上的地面標線,路側的限速標識。
如果采用的車載立體網絡攝影機(如雙目網絡攝影機),還能計算出汽車和其他物體的相對距離,相對角度。(所以說馬斯克說可以自動駕駛不用毫米波雷達,可以全部用網絡攝影機來代替。)

但如果要盲點檢測,全景泊車、泊車輔助,就需要在車身上布置多個網絡攝影機,達到車周的覆蓋空間無死角。
車載網絡攝影機一般都是由CMOS鏡頭,芯片,記憶體,外殼組成。 原理就是將拍攝到的影像轉為二維數據,進行影像匹配辨識,分辨出拍到的物體是行人、汽車、單車、電動車、交通標識等。
現在的網絡攝影機排布,基本上都會采用前視,側視,後視,內視的排布,包括廣角鏡頭,長焦鏡頭,數量從5個到10個不等。
車載網絡攝影機的優點就是分辨率高,采集資訊豐富,最符合人類視覺的語意資訊,成本也低。
但 缺點也很明顯,因為是靠光的反射來進行拍攝,就會受光照影響較大 ,黑夜歷奇本無法使用。且受環境天氣影響較大,雨雪、大霧,灰塵、昆蟲等都會影響到網絡攝影機,導致它無法全天候全地形工作。另一個缺點,就是只能采集平面資訊,無法采集深度資訊,三維立體感不強,且拍照邊緣容易有失真現象,即便後期進行演算法修正,也有可能造成圖形的誤判。

所以,毫米波雷達的分辨率低,車載網絡攝影機又受到光照影響和無法構建3D圖形,那麽就需要一個分辨率高,不受光照影響且能構造清晰3D圖形的探測器,那就是現在比較熱門的激光雷達。
激光雷達
激光雷達,靠發射激光束,然後接受到目標回波,與發射訊號做出對比後,從而得知物體的相對位置和速度等數據。
目前最主要有三種類別的激光雷達。
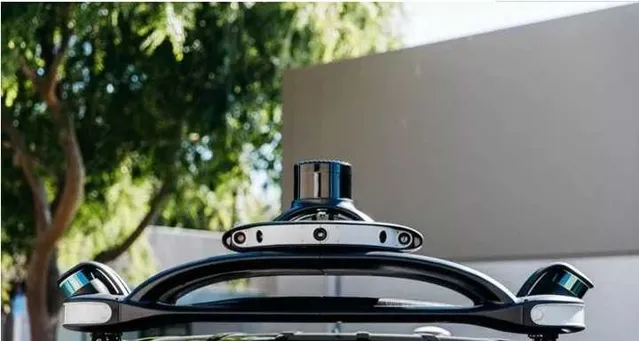
快閃激光雷達 ,用單個的大面積激光脈沖來照亮探測的環境,現在最常用的,大家說的基本就是TOF激光雷達。早期車企做實驗時,大部份都頂著一個雷達包,那就是機械激光雷達,使用一個旋轉元件,通常裝載在車頂,讓激光雷達可以360°覆蓋周圍。
另外一種固態激光雷達,就沒有移動部件,只有固定的視角,使用多個傳感器來覆蓋車輛周圍,現在上市的車輛配置的激光雷達,基本都是這種。
微機電系統激光雷達(MEMS) ,透過非常微小的鏡面,用電壓來改變鏡面,來調整發射激光的角度。
光學相控陣雷達(PA) ,透過光學相控陣(有多個光頻移相器組成)發射激光雷達。
激光雷達的優點就是分辨率高、精度高 ,對比10CM級別精度的毫米波雷達,激光雷達的精度可以輕松到 毫米級別 ,可以輕描淡寫給所有周邊大小物體建立3D立體圖形。
網絡有個經典的點雲圖,就是描述的激光雷達的效果。

而激光雷達的角分辨率更是超過毫米波雷達數個等級,輕松可以達到0.1°,也就是說可以分辨3KM距離上的相距5M的兩個目標。
激光雷達比起毫米波雷達,能抗電子幹擾 。因為毫米波雷達發射的是無線電訊號,屬於電磁波,在我們的周圍,存在著大量各種電磁波,所以會幹擾毫米波雷達的判斷。而激光雷達則不會受到此類幹擾。
但是激光雷達由於是光束,會受到空氣中微粒的影響 ,所以雨霧霾塵裏會急速衰減,傳播距離大大受限。對比網絡攝影機,激光雷達無法分辨平面影像,所以也無法分辨圖形和顏色的含義。
而且還是因為是 光束,所以也會受到折射面和陽光的影響 ,比如反光強烈的物體會造成激光雷達的誤判,容易在點雲中形成和現實物體完全不同的 「虛影」、「重影」 。
而且激光雷達現在的造價還十分高昂,市面上的32線激光雷達(掃描數據量70萬點/秒)級別的,售價就高達數萬美元。線束越多,垂直角分辨率越高,精度越高的激光雷達就越昂貴。
但隨著自動駕駛的快速發展,需求量越來越大,國內廠商的發力。有望到 2023年,上述的激光雷達的售價降到千元級別。
超聲波雷達
超聲波雷達是透過發射並接受超聲波(機械波),根據時間差算出障礙物距離,測距精度達到1-3CM。
超聲波雷達一般有 UPA和APA ,APA和UPA的工作頻率不同,不形成彼此幹擾。
UPA的探測距離一般在15CM-250CM。通常安裝在汽車前後保險杠上,用於輔助泊車。
APA的探測距離在30-500CM,如果要進行自動泊車,車輛的側面也會裝有超聲波的傳感器,用於測量側方障礙物的相對距離,這裏一般用的是APA.因為APA的探測距離較遠,也可用在駕駛的時候探測後方、側面是否有來車過於靠近。

超聲波的優點是成本極低,制作方便,遇到障礙物後反射效率高,且耗能低,與障礙物近距離時的抗自然因素幹擾能力強,雨雪沙塵等惡劣天氣都能使用,也不受光暗度的影響。
其 缺點就是因為是機械波,所以受溫度影響較大 。零攝氏度的波速為332m/s,30攝氏度的波速為350m/s,所以溫度過高或者過低,車速如果過快,都會造成超聲波測距的誤差,所以現有的輔助泊車還是自動泊車,實際都是要求人的視線同步進行觀察的。
且因為超聲波散射角大,方向性不集中,無法精準描述障礙物位置,且在測量較遠距離目標時,無法保障精度。
上述這個超聲波雷達的弊病,也是很多人對自動駕駛AEB不理解的地方。
我不止一次地看到有人不解評論,甚至還有汽車行業的人問,為什麽輔助駕駛看到前方這麽大一個障礙物,比如翻倒的車輛,一個大箱子,都不會報警,還會撞上去。而我在倒車,牽車的時候,一個小障礙物影響到了我的車輛前進後退,車輛都會報警。

當作者解釋說,因為毫米波雷達和網絡攝影機無法確認前方有障礙物,反而這些評論的人更加迷惑,那要什麽分辨啥障礙物,像倒車一樣,就如同自動泊車一樣,後面有障礙物靠近了,不停報警,再不管剎停就好了啊。
但是因為倒車的原理是用超聲波雷達的特性,在近距離可以很精確判斷後方有無障礙物,但是 超聲波雷達距離越遠靈敏度越差 ,5米以上就無法判斷障礙物的相對距離,且方向性較差,無法精準描述障礙物位置。所以車輛行駛中,如果前方一百米處有障礙物,超聲波雷達是無法辨別出來的,等靠近了幾米後報警再剎停,因為車的速度在這裏,百公裏剎車都是三四十米起,用超聲波雷達來高速測距再剎停,黃花菜都涼了。
而現有的智能輔助駕駛中,毫米波雷達的分辨精度極低,且對金屬敏感,容易產生噪點,而網絡攝影機靠演算法(智能AI)來對比障礙物,一旦融合數據在演算法的辨析裏出不來,前方障礙物就會被無視掉。

綜上所述,就應該知道毫米波雷達,網絡攝影機,激光雷達,超聲波雷達是如何揚長補短的。
毫米波雷達精度低,但是可以方便得到周圍物體的相對速度和距離。網絡攝影機可以獲得平面圖形,看懂交通標識和分辨顏色。激光雷達探測精度高,可以獲得周圍物體的三維影像。超聲波雷達在短距離測距中有著極大的成本、能耗低的優勢。
所以自動駕駛走向完善,還是需要多種感知器材來進行一個搭配,才能在範圍、精度、FOV、取樣率、成本和一般系統復雜性之間做好平衡,搭建一個完美的感知平台。












