目前,線控底盤,我推薦 【PIX Moving】,官網產品介紹以及理由如下。
PIX自動駕駛線控底盤 - 自動駕駛技術、無人駕駛、線控底盤--PixMoving
執行中的PIXKIT自動駕駛開發套件
PIXKIT 是一套開源自動駕駛開發及教學套件。
一站式、低成本、高效能, 支持自動駕駛開源軟件 Apollo、Autoware及 ROS、MATLAB/Simulink 等平台 ,軟硬車 + 指導文件一體,降低開發門檻,助力師生、開發者和工程師快速實車上手,演算法研發, Demo 演示,套用落地,激發更多可能性。

硬件構成 x 4

文件構成 x 4
開源自動駕駛軟件 Apollo、Autoware 教程文件ROS 開發指導手冊
底盤線控技術手冊
科研專案案例文件
真正提供一站式的開發解決方案

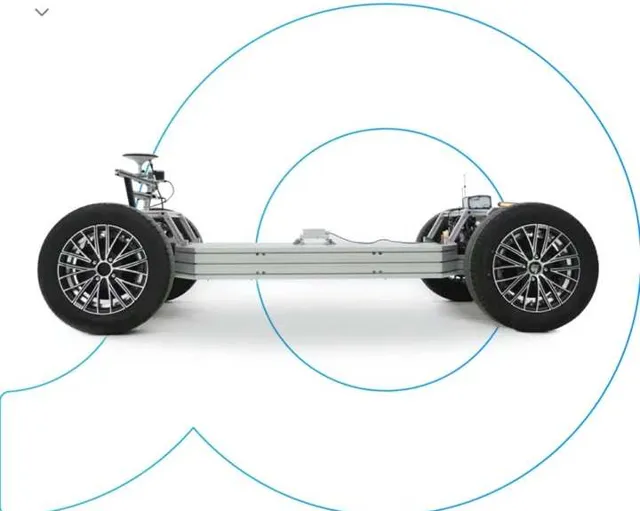
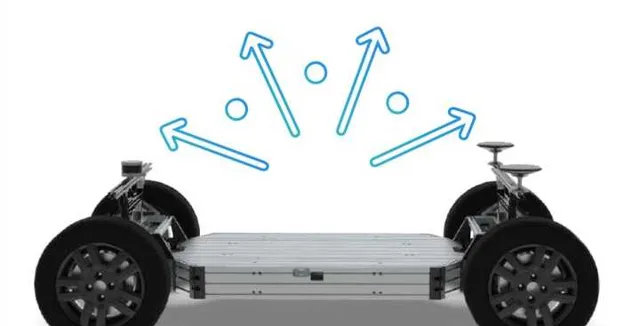
1 、全線控底盤
純電開源線控底盤,
工程師為工程師設計的
開發平台


高精度線控 轉向、制動、動力、檔位、駐車、車燈全線控。

開源 底盤 VCU 程式碼、CAN 協定介面、機械設計全開源。
輔助功能 超低速自動泊車模式、半坡起步輔助功能。

支持Apollo、Autoware 提供與Apollo、Autoware匹配的底盤DBC檔,具備開放的CAN介面,隨插即用。同時支持各類自動駕駛演算法系統及格式。

多重轉向模式 四輪輪轂電機獨立驅動閉環控,相容四輪轉向和兩輪轉向模式,靈活強大。

安全可靠 速度誤操作保護,遙控急停,仿生架構,小腦 (VCU) 獨立於自動駕駛系統,控制底盤安全執行機構,減輕電子控制冗余同時保證高安全等級自動駕駛。
支持 Matlab/Simulink 開發環境 開發者可以將 Simulink 中開發的自動駕駛演算法模型,其計算結果透過 CAN 即時發送給 PIXLOOP 線控底盤,實作 Vehicle-in-loop,快速驗證演算法。例如,將 Simulink 中搭建的自適應巡航控制演算法計算出來的加速踏板量、制動踏板量,透過 CAN 發送給 PIXLOOP 線控底盤,實作快速演算法實車驗證。
2 模組化支架
標準模式
兩端標準化支架設計,
充分預留中間位置,
安裝不同功能裝備。
可延伸模式

搭配10米型材包,無需打孔,
連線底盤任意位置,
輕易搭建傳感器支架,
可實作個人化外觀。

擴充套件模式下,
可部署不同配置傳感器,
支持全級別自動駕駛的開發。
3 全套傳感器
支持全環境自動駕駛
包含顯視器、CAN卡、工控機、交換機、激光雷達、網絡攝影機、GNSS、IMU 等傳感器和器材,支持 Autoware、Apollo自動駕駛功能的實作。

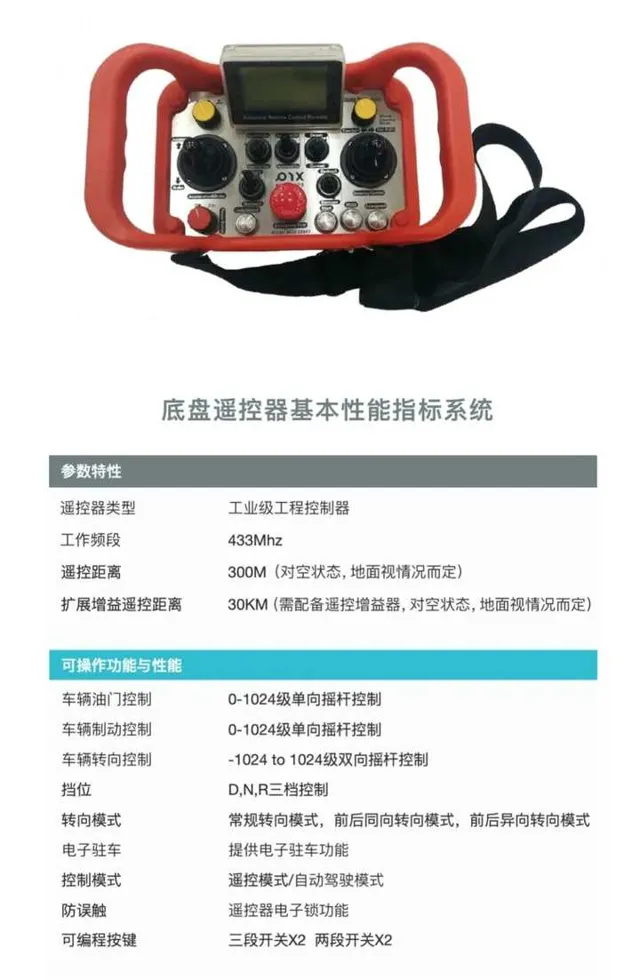
4 工業遙控器
強大效能,保障安全
PIXKIT 文件構成 x 4
4套文件,內容涵蓋自動駕駛開源軟件Apollo、Autoware,ROS 系統,線控技術和科研專案案例,實作全維度指導,滿足立體式教學,上下層研發,專案研究,落地 Demo。
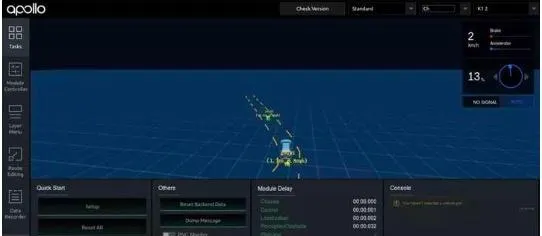
1 Apollo 教程文件合集 Autoware 中文指導手冊、影片 助力快速全面上手
Apollo 教程文件合集
PIX 將 Apollo 制作的公開教程文件整理成了 合集文件,涵蓋從入門到進階每個步驟的 圖文教程,Apollo 社區在中國擁有強大的 技術支持和社區夥伴,開發者可輕易的獲取大量學習資源,進入 Apollo 生態。

關於 Apollo
Apollo是百度釋出的向汽車行業及自動駕駛領域的合作夥伴提 供的軟件平台,旨在向汽車行業及自動駕駛領域的合作夥伴提 供一個開放、完整、安全的軟件平台,幫助他們結合車輛和硬 件系統,快速搭建一套屬於自己的完整的自動駕駛系統。
Apollo Github 地址: https:// github.com/ApolloAuto/a pollo
Apollo 優勢
• 豐富的線上學習資源,全球頂尖的開發者社區:http:// apollo.auto/devcenter/i dpcourse_cn.html • Apollo 是一個高效能、靈活的架構,它加速了自主車輛的開發、測試和部署。
• 強大的開發團隊,不斷叠代升級
• 擁有360度的可視性,可以處理城市道路不斷變化的情況 • 基於場景的規劃可以在復雜的場景中導航• 支持車路協同技術
• 高效能 Cyber RT 框架,更加適合工業級自動駕駛
Autoware 中文指導手冊、影片


由 PIX 制作的中文版 Autoware 指導手冊,操作影片,內容涵蓋從環境部署、軟件安裝到實車連線、Demo 執行的全套教學。同時,Autoware 在 Gitlab 有全透明全場景的程式碼庫,豐富的線上學習資源,幫助開發者極速掌握 Autoware,實作多場景實車 Demo。

PIX 已基於 Autoware 開發數年,並於 2018 年與 TierIV、Udacity、Velodyne、Neousys 等共同發起全球首個無人駕駛工程師實訓實訓基地,有豐富的 Autoware 使用、開發和教學經驗。
關於Autoware
Autoware 是全球第一款開源自動駕駛軟件,起源於日本名古屋大學,目前已是全球著名的自動駕駛開源平台之一,有超過 100 個全球企業、高校和研究機構使用。系統涵蓋定位、感知、 預測、決策、路徑規劃和控制。軟件采用模組化設計,可針對不同場景進行相應增減和最佳化。
Autoware 開源平台 Gitlab :https:// gitlab.com/autowarefoun dation/autoware.ai/autoware/-/wikis/home
Autoware優勢:
· 針對 L4 級別的自動駕駛能力,已具備完備的核心功能
· Gitlab 全開放程式碼
· 部署簡易,兩天上手
· 豐富的線上學習資源,全球頂尖的開發者社區
· 基於 ROS 開源平台搭建,支持 ROS 開發環境
· 采用 Apache2.0 特許,支持二次開發,自主封裝套用
· 開放的高精度地圖工具,實作本地采圖、建圖、制圖
-執行展示-





2ROS 開發指導手冊

包含對 ROS 的基礎介紹和使用教程,以及專案移植的詳細講解,手把手教你如何深入使用 ROS 相關命令和功能模組。PIX 教程手冊還會針對自動駕駛介紹相關 ROS 編程技巧和專案移植以及正對 Autoware 的相關知識的詳細講解,幫助開發者更深入的了解自動駕駛開發原理和方式。
3 車輛線控技術指導手冊

提供從線控原理、線控轉向、制動、動力和檔位的全方位技術指導,從原理上介紹自動駕駛的控制原理和實作方式,為對線控車輛沒有基本概念和不太了解控制原理的工程師 提供開發捷徑,快速對自動駕駛汽車底層控制部份有客觀認識,從而更好的開發自動駕駛技術。
4 科研專案案例文件

提供基於本線控底盤的智能網聯汽車相關專案文件,作為案例樣版,助力高校及科研機構的科研立項工作。
PIXKIT 優勢
PIX 技術支持
基於各個指導手冊,PIX 的工程師為開發者們提供遠端線上的輔助技術支持,包含:
> 提供全車電子控制相關故障檢查與診斷 > 全車機械傳感器支架安裝指導
> 傳感器安裝位置參考建議等
> 全車維護與保養建議> 提供 Apollo、Autoware匹配dbc檔> 提供 Autoware 安裝線上支持
> 提供 Autoware 自動駕駛軟件與底盤對接偵錯支持> 提供匹配Autoware的高精度地圖建立指導
> 提供 Autoware 相關功能模組拓展介紹

客製化選購
同時,我們為開發者提供了選配版開發套件,可客製尺寸、轉向模式、傳感器、續航裏程、選擇是否預裝 Autoware 等,也可以單獨購買線控底盤或傳感器部份,更多選項更貼近你的開發需求。詳情可咨詢 PIX 客服。












