近兩年自動駕駛技術一直炒的火熱,作為百年汽車工業史上又一次偉大的轉移,它可以說重新定義了汽車產業規則。 讓汽車不再是「四個輪子加一套座椅」,更像是一個「行走的第三空間」 ,可以說自動駕駛的發展是一個必然的趨勢。
但對行外人來說,自動駕駛吵得再火熱他們也是聽個熱鬧。而且就目前而言,自動駕駛汽車技術還有相當曲折的路要走。今天小歐就盡可能用簡單的話術系統的給大家介紹一下自動駕駛。
首先,我們先大致了解一下什麽是自動駕駛汽車?
自動駕駛汽車(Autonomous vehicles;Self-driving automobile )又稱無人駕駛汽車、電腦駕駛汽車、或輪式移動機器人,是一種透過電腦系統實作無人駕駛的智慧汽車。在20世紀已有數十年的歷史,21世紀初呈現出接近實用化的趨勢。自動駕駛汽車依靠人工智慧、視覺計算、雷達、監控裝置和全球定位系統協同合作,讓電腦可以在沒有任何人類主動的操作下,自動安全地操作機動車輛。
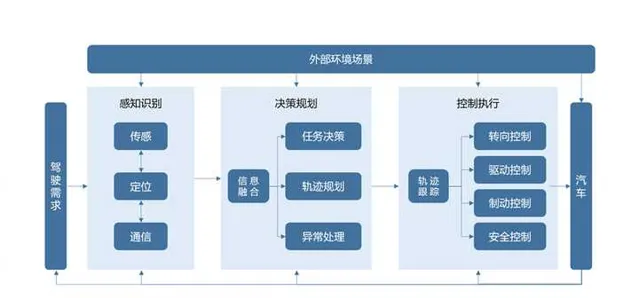
其結構一般分為:感知系統、決策系統、執行系統3個部份。
簡單來說,自動駕駛系統其實就是請了個司機代替你的眼睛、大腦、手、腳,最後做出反應。
當前,關於自動駕駛的分級, SAE(國際汽車工程學會) J3016檔曾提出的五級自動駕駛分級方案,這也是被自動駕駛領域和國際社會普遍認可的,從輔助駕駛(L1、L2)到自動駕駛(L3),再到無人駕駛(L4、L5)。至於我們常說的自動駕駛,其實就是L3。
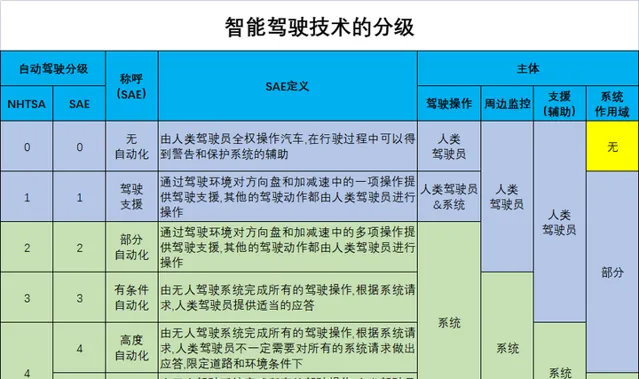
關於上面的定義,從另一個角度理解就是:
跟人類駕駛一樣,我們需要先觀察路況,然後腦海裏做決策,手腳再配合執行。自動駕駛亦是如此,所以它的技術框架核心也是分為 感知辨識、決策規劃、控制執行 三部份。
1、感知辨識
盡管自動駕駛汽車已經學會了辨識固定的紅綠燈和移動的行人,但是它們依然無法適應所有的新情況,尤其是在高速、復雜的城市環境中,歸根究底還是感知系統有待加強。
感知系統作為人工智慧系統的出發點、人工智慧系統的重要模組,也是人工智慧系統成功的關鍵。 在自動駕駛系統中,感知系統由傳感器+演算法+計算平台組成,三個模組的有機結合促成無人車具有像普通人一樣的感知能力。
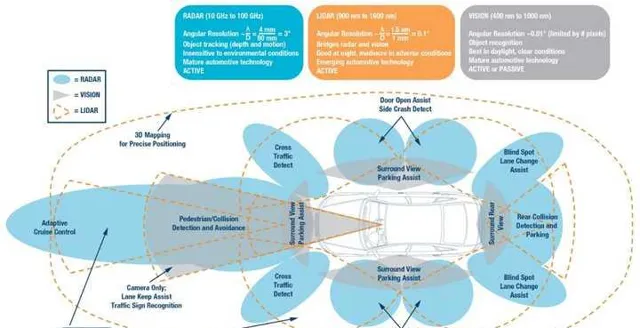
不同的傳感器提供不同型別的資訊,並具備不同特點。
如相機可提供2D影像;雷射雷達可提供周圍環境的三維資訊;紅外相機可用於夜間的環境感知。例如L2技術更多使用網路攝影機與公釐波雷達、L4技術需要使用雷射雷達(LiDAR)。但雷射雷達傳感器還存在許多問題,譬如穩定性方面的問題。
很多LiDAR紅外雷射器在波長穩定性方面面臨不少難題,例如:隨著工作溫度的升高,波長偏差量也同時提高,甚至會導致LiDAR系統的「視覺」便會出現模糊。
目前艾邁斯歐司朗全新的芯片設計 可將波長偏差量降低至10奈米 ,大大提高了環境影像的解析度和銳度,但在助力自動駕駛進入新「視界」這條路上,我們還有很長的路要走。
2、決策規劃
決策系統主要是依據感知資訊來進行決策判斷,確定適當工作模型,制定相應控制策略,替代人類駕駛員做出駕駛決策。這部份的功能類似於給自動駕駛汽車下達相應的任務。
例如在車道保持、車道偏離預警、車距保持、障礙物警告等系統中,需要預測本車及相遇的其他車輛、車道、行人等在未來一段時間內的狀態。
先進的決策理論包括模糊推理、強化學習、神經網路和貝葉斯網路技術等。
由於人類駕駛過程中所面臨的路況與場景多種多樣,且不同人對不同情況所做出的駕駛策略應對也有所不同,因此類人的駕駛決策演算法的最佳化需要非常完善高效的人工智慧模型以及大量的有效數據。
這些數據需要盡可能地覆蓋到各種罕見的路況,而這也是駕駛決策發展的最大瓶頸所在。
3、控制執行
自動駕駛的執行是指系統在做出決策後,按照決策結果對車輛進行控制。

車輛的各個操控系統都需要能夠透過匯流排與決策系統相連線,並能夠按照決策系統發出的匯流排指令精確地控制加速程度、制軔程度、轉向振幅、燈光控制等駕駛動作,以實作車輛的自主駕駛。
而這三部份的核心技術,如果細化下來其實都是依靠一個個模組實作的。
像 演算法 (現階段,感知演算法與決策演算法模組是自動駕駛技術的瓶頸,仍有待最佳化)、 計算平台( 高計算能力、低功耗 ) 、傳感器(上述說的雷射雷達(LiDAR)其實就是傳感器模組裏很重要的一部份)以及 測試手段 (包括真實道路測試、仿真回歸測試)等等。
在光學傳感器這塊,一直是艾邁斯歐司朗研究關註的重點,但關於感知系統的研究永無止境,而艾邁斯歐司朗也將持續在光學領域不斷地進行投資與研究,也歡迎大家持續關註艾邁斯歐司朗 @歐司朗中國照明,了解更多汽車自動駕駛領域知識。










