看了其它答主的答案,題主是不是有點疑惑,為什麽現在不用了?
那麽先解釋一下為什麽當初這根「矛」這麽長
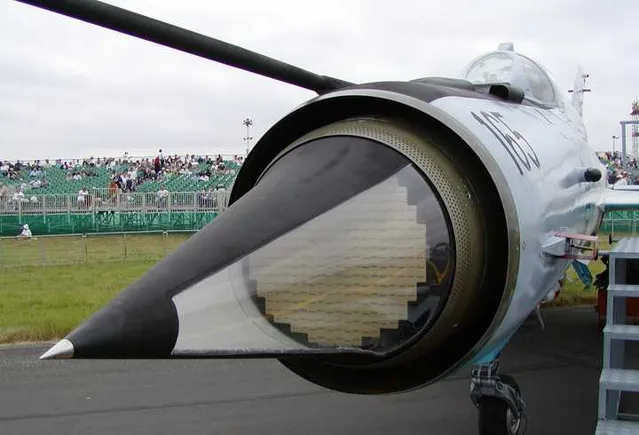
空速管是利用皮托管原理 (⌘) 來精確測量飛行時的大氣總壓和靜壓,數據電腦再透過白努利全靜壓方程式等計算式來換算得飛行控制所需的飛行速度、升降速度和大氣壓力等數據。空速管在使用中會受到氣流幹擾,空速管的長度越長,前端測壓口與機體的距離越遠,所測量的靜壓就越接近大氣真實靜壓。對於簡單粗暴追求馬赫數的二代機而言,空速管的意義不言而喻,自然要做長以獲得最真實的速度數據。
那麽問題來了,後來這根「矛」怎麽沒了?
這問題主要是因為機頭空速管太礙事了
首先長長的空速管對於大迎角飛行狀態時,是引起頭部渦流及側向不穩定的因素之一,導致操控品質的下降同時也影響隱身效能,當然這不是重點。更重要的是空速管對機載雷達的影響,這個金屬大家夥杵在機頭,無論是對雷達的幹擾,還是對雷達罩的影響都讓設計師十分頭痛,將空速管從機頭移開顯得十分必要。

所以之後從70年代開始,歐美的戰鬥機轉而采用機身空速管設計。雖然在數據采集的精度上,機身空速管要差於最佳位置上的機頭空速管,但透過對稱設定多個L型空速管,利用大氣數據電腦更強的數據處理和修正程式的誤差補償,也可保證測量的精度。機身空速管的更為輕便,安裝位置也更為靈活。

不過呢,機頭空速管還是有存在必要的,雖然不一定會像題主圖示的MIG 21那樣有根大空速管,但是在飛機研制驗證階段,機頭空速管可以帶來最真實的數據,為後續的改進提供參考。


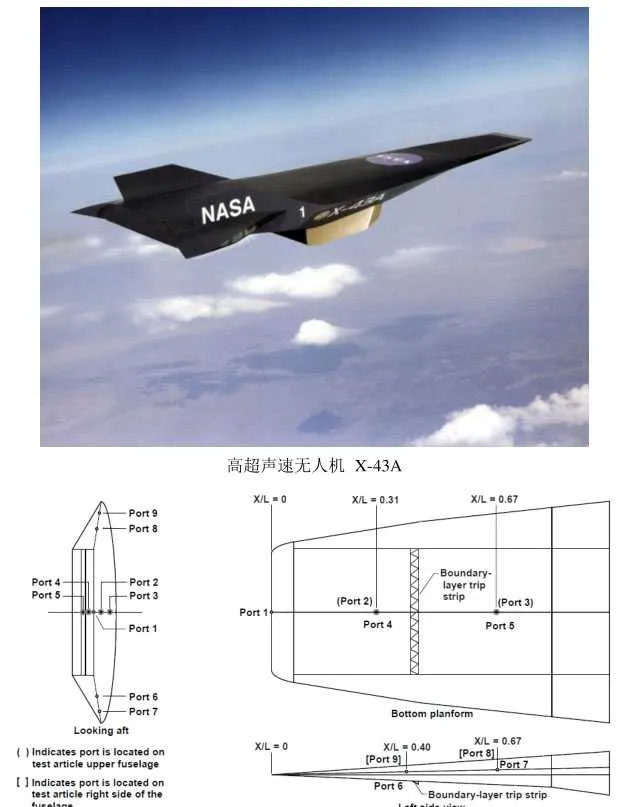
這裏又要說道一下,L型空速管雖然解決了機頭空速管的諸多問題,但突出氣動機身的空速管對於四代機要求之一的超音速巡航又顯得問題突出,因為空速管在高速飛行時產生的激波不僅會影響飛行操控的穩定性,同時高超音速飛行所產生的氣動熱更是很可能將傳統的空速管燒蝕。
於是乎融入飛行器表面流線的大氣數據傳感器技術被提出。這種技術依靠嵌入在飛行器前端或機翼的壓力傳感器陣列來測量飛行器表面的壓力分布,並由壓力分布間接獲得飛行參數的數據傳感系統。這就是嵌入式大氣數據傳感系統(Flush Air Data Sensing FADS)。
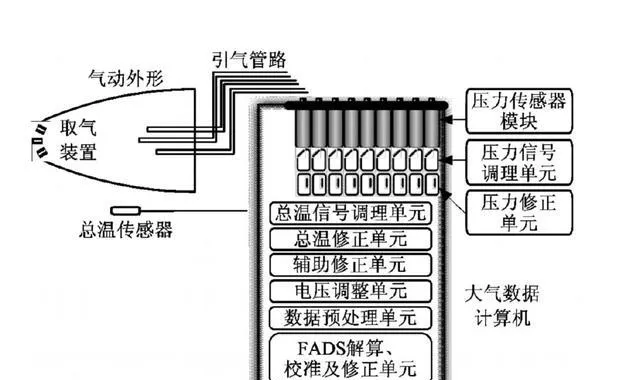

可以這麽說,L型空速管在未來很長一段時間都是主流且必要的,但未來必定是FADS的天下。
⌘ 科普一下空速管原理
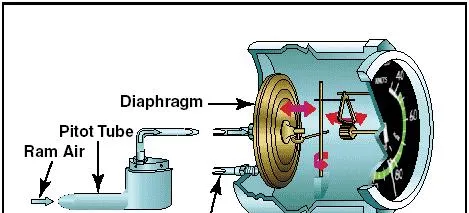
當飛機向前飛行時,氣流便沖進空速管,在管子末端的感應器會感受到氣流的沖擊力量,即總壓。飛機飛得越快,總壓就越大。如果將空氣靜止時的壓力即靜壓和總壓相比就可以知道沖進來的空氣有多快,也就是飛機飛得有多快。以機械式空速表為例比較兩種壓力的工具是一個用上下兩片很薄的金屬片制成的表面帶波紋的空心圓形盒子,稱為膜盒。這盒子是密封的,但有一根管子與空速管相連。如果飛機速度快,動壓便增大,膜盒內壓力增加,膜盒會鼓起來。用一個由小杠桿和齒輪等組成的裝置可以將膜盒的變形測量出來並用指標顯示,這就是最簡單的飛機空速表。再簡單點就是空氣進入空速管後透過一個壓力傳感器獲取當前的氣壓數值並換算成速度。
針對某位執著討論空速管的問題:

因回復無法貼圖這裏做個解釋:
總壓和皮托管的長短關系並不大,要不然也不會有較短的L型空速管的出現,但靜壓就不一樣。
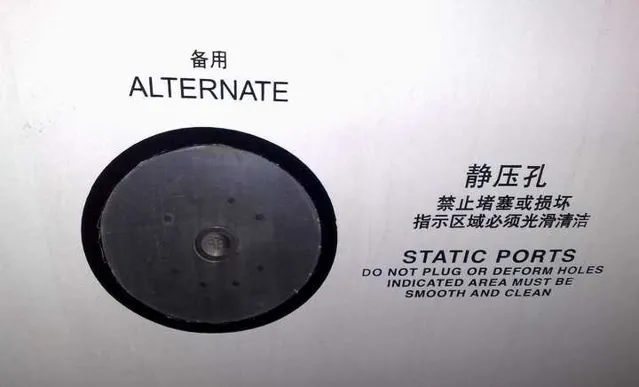
大氣靜壓定義為飛機前方無限遠處的來流靜壓,但由於飛機上靜壓孔的位置、測量裝置、馬赫數、迎角、側滑角等因素的影響,靜壓孔測量的靜壓值總會存在一定的誤差,靜壓系統的靜壓誤差主要取決於其位置誤差的大小。所以,減小靜壓誤差就要減小靜壓源位置誤差。
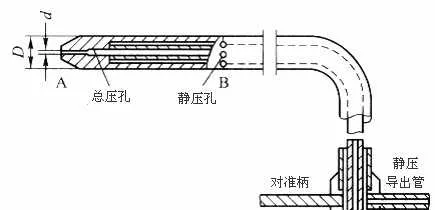
所以 空速管的最佳安裝位置 就是在與機身軸線相同的機頭前方,空速管軸向應盡量與氣流方向平行且盡可能遠離機體,這樣就能獲得最真實的靜壓,MIG 21就是這麽做的,那麽 處於最佳位置的空速管 是怎麽測量靜壓的呢?


如圖所示,為盡可能測到最真實的大氣靜壓,空速管密布這些靜壓孔,而這些靜壓孔連著靜壓管(和總壓管不同管),最後交給相關裝置處理。
當然,現在隨著大氣數據電腦能力的提高,透過多個機身的L型空速管和多角度的機身靜壓孔就可在電腦的幫助下結合氣動數據保證精度。