決策和規劃一般是聯系到一起的。
首先介紹目前自動駕駛規控的兩種軟體框架,然後對後續內容做一個目錄大綱展示。
0. 自動駕駛的軟體系統的框架
目前有兩種:
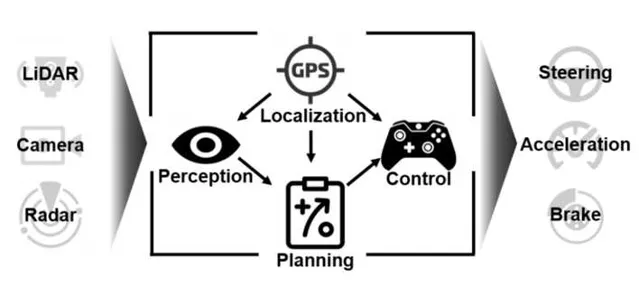
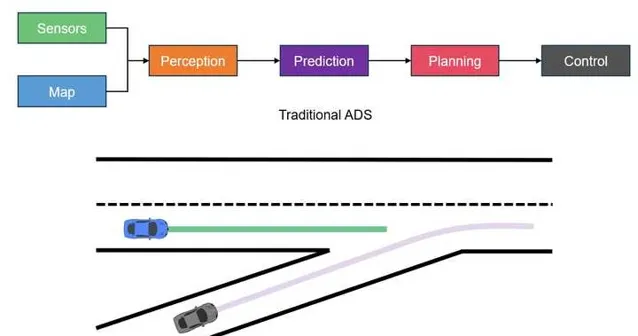
0.1 模組化的思路
輸入:lidar\camera\radar
中間演算法:perception\localization\planning\control
輸出:steering\acceleration\brake
優點:過程可控,方便理解。
缺點:長尾問題不好解決,隨著長尾問題的解決,架構變得冗余。
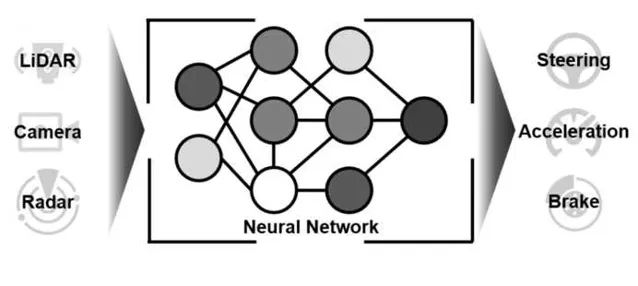
0.2 端到端範式
輸入輸出不變,中間過程用神經網路來代替。
優點:資訊的無失真傳遞
缺點:每個子任務傳遞的資訊不可解釋,訓練要求的樣本數量多,如果場景沒有訓練,其泛化性不確定。
個人觀點:未來一段時間內,是端到端範式和傳統rule-base相結合的一種方式,優劣勢互補。
規控課程的目錄結構
1. 基礎的規控演算法--求解子問題的工具
1.1 搜尋的方法
比如:Dijkstra/A*/DP
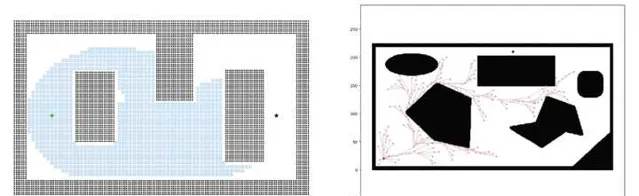
1.2 隨機采樣的方法
比如:PRM/RRT/RRT*/CLRRT
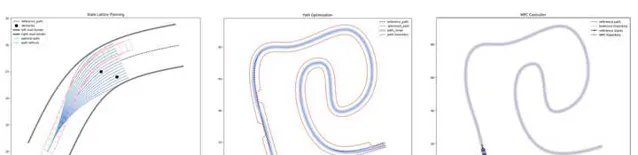
1.3 基於運動學的方法
比如:Hybrid A*(基於運動學的搜尋)/State Lattice(基於運動學的采樣)
1.4 基於數值最佳化的方法
比如:QP/iLQR
1.5 控制領域常用的方法
比如:PID/LQR/MPC
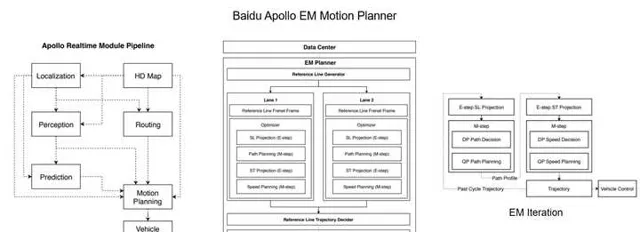
2. 決策規劃的演算法框架
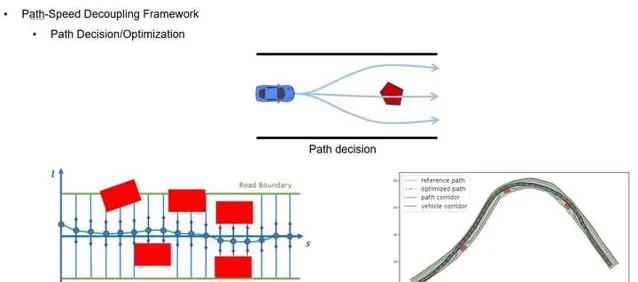
2.1 路徑-速度解構的框架
目前很多公司使用的方式
將三維問題解耦成兩個二維問題
分Decision和Optimization,透過Decision把直接求解的非凸問題變成凸問題。
path可以基於frenet座標系也可以基於笛卡爾座標系求解
如何讓path=speed的輸出更擬合呢?
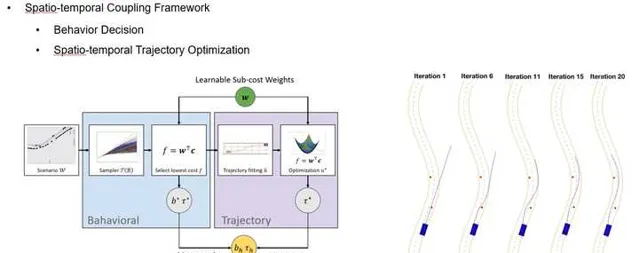
2.2 時空聯合的框架
分bahavioral和trajectory
bahavioral采樣軌跡,並剪枝,把剪枝後的軌跡下發給trajectory,做一個時空聯合的規劃
這種框架的輸出會更有。
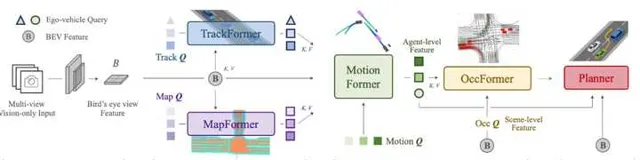
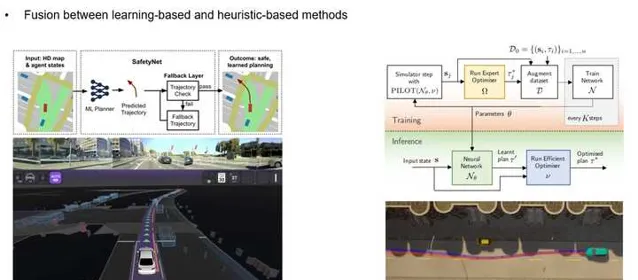
2.3 數據驅動的框架
UniAD CVPR2023 best paper
learning-base和rule-base的融合
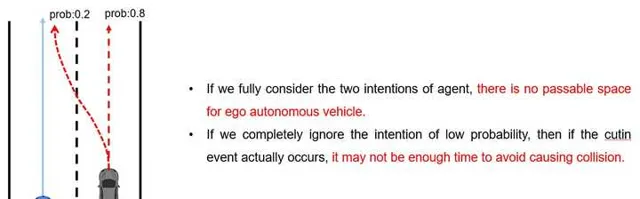
3. 如何在決策規劃中處理機率性/不確定性的問題
背景:他車意圖的不確定性
目標:既考慮對方車的意圖又能保證自車的及時處理時間
應變規劃Contingency planning,透過一個shared segment過度到多個分支,算是延遲決策。

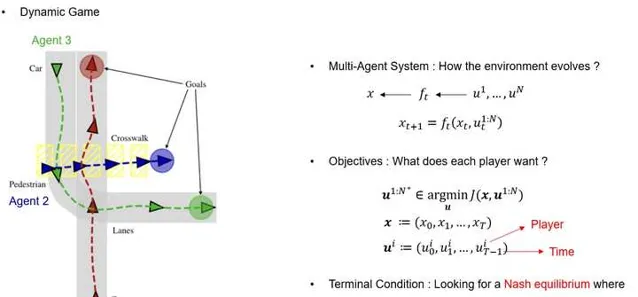
4. 互動式規劃 Interactive Planning
自車的prediction在planning之前,所以預測拿不到當前規劃的結果
prediction與planning應該是互相影響的
基於賽局論的方法對問題進行建模,尋找奈許均衡,使環境中的每個玩家無法透過改變自身的行為來讓整個系統變得更優
iLRGame的計畫,聯合規劃的建模,數學建模和推導
後續系列文章
轉載請註名出處:作者:自動駕駛轉型者,原文連結:【規控】01導論-知識點梳理-讓你對智駕規控有個全域觀
歡迎
點贊+收藏+關註
,後續會持續輸出











