論文: A Unified Query-based Paradigm for Point Cloud Understanding
開源 :soon
摘要: 三維點雲感知是自動駕駛和機器人技術的重要組成部份。論文提出了一種新的Embedding-Querying paradigm(EQParadigm)用於3d點雲檢測、分割和分類。EQParadigm是一種統一的樣式,可以將任何現有的3D backbnone與不同的任務頭結合起來。在EQParadigm下,輸入首先在embedding階段,采使用voxel-baes或者point base提取特征並進行編碼,
然後,querying階段使編碼的特征適用於不同的任務頭。這是透過在querying階段引入中間表示(即Q表示)來實作的,論文中Q表示是一種神經網路,作為embedding階段和多head之間的橋梁。。大量實驗結果表明,EQParadigm與Q-Net相結合進一步提高不同任務的魯棒性。
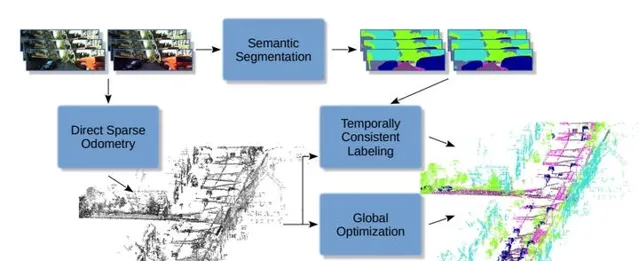
論文: Vision-based Large-scale 3D Semantic Mapping for Autonomous Driving Applications
開源: 無
在論文中,提出了一個完全基於立體相機系統的 3D 語意分割pipline。pipline包括一個稀疏視覺裏程計前端以及一個用於全域最佳化的後端,包括 GNSS 整合和語意 3D 點雲標記。提出了一種簡單但有效的時間投票方案,可以提高 3D 點標簽的品質和一致性。評估是在 KITTI-360 數據集上進行的。結果顯示了方案的有效性.