中國距自動駕駛的普及還有多遠?2021年,我們距自動駕駛的未來似乎非常接近,又非常遙遠。
今年,一部份高階自動駕駛車型已經邁入量產,完全無人化的Robtaxi也進入了早期測試階段。僅以百度Apollo為例,其與威馬合作搭載AVP自主泊車系統的車型威馬W6已量產上市;5月,Apollo 在北京首鋼園區向公眾開放了主駕駛位無人的Robotaxi。
也就是說,普通消費者現在立刻馬上就能買到帶有高階自動駕駛功能的車型,或者付費使用完全無人駕駛的服務。但前提是,這些車型的售價/成本並不低廉,高級別的自動駕駛功能或者完全無人駕駛,需要在特定場景下才能執行。
無論對於哪個級別的自動駕駛,安全性、ODD(設計營運區域)以及經濟性是衡量技術商業化程度的三個要素。加速自動駕駛的發展,核心就是持續提高自動駕駛系統的安全性,擴大自動駕駛系統可執行的ODD範圍以及改善系統的經濟性。
但如何同時做到這3點呢?

6月24日,清華大學智能產業研究院(AIR)聯合百度Apollo共同釋出了全球第一份車路協同技術創新白皮書【面向自動駕駛的車路協同關鍵技術與展望】。一邊是中國頂級學府的人工智能產業研究機構,另一邊是中國最早投入自動駕駛研究的平台公司,清華和百度聯合釋出的這份白皮書指出了:發展車路協同將是自動駕駛規模化和商業化的必經之路。
一、單車智能面臨的三大挑戰
當前,全球業內主流的自動駕駛方案是2條路線:單車智能(Autonomous Driving,簡稱「AD」)與車路協同(Vehicle-Infrastructure Cooperated Autonomous Driving,簡稱「VICAD」)。
Waymo和特斯拉走的都是AD單車智能的路線。而單車智能當前正面臨三重挑戰,這表現在這兩家公司身上尤為明顯:
1. 經濟性堪憂。Waymo為了保證自動駕駛系統的安全,最大程度地減少車輛盲區並且消除單一傳感器的感知局限,因此它選擇在車輛上搭載了堪稱「奢華」的傳感器配置——5個激光雷達、6個毫米波雷達以及29個網絡攝影機,這些傳感器加上高規格的計算單元導致Waymo的自動駕駛車輛成本高企。
2. ODD設計營運區域有限。同樣為了保障安全,Waymo的車隊目前僅在亞利桑那州的鳳凰城等少數幾個人煙相對稀少並且經過大量測試的地域營運。
3. 安全性。Waymo采用高成本的系統方案以及有限的ODD營運範圍,從而保障自動駕駛車隊的安全性,但弊端在於在前兩者的限制下,實際上Waymo的商業化行程緩慢。而特斯拉剛好相反,特斯拉采用了以視覺為主的傳感器方案,將整套系統成本降低,同時將ODD範圍拓展到絕大部份的高速封閉道路以及一部份的開放城市道路,這樣反過來導致系統的安全性相比高等級自動駕駛方案大幅降低,從2016年開始特斯拉不斷發生Autopilot開啟時使用者在交通意外中死亡的事故。
這樣看來,在AD單車智能的技術路線上,經濟性、ODD和安全性似乎永遠是顧此失彼,難以兼得的多重要素。
而VICAD車路協同提供了一種完全不同的思路。
二、車路協同是自動駕駛的必由之路
「靠單車智能,現在高速公路的自動駕駛基本上做的還是不錯的。但要進入城市道路,尤其在路口這樣的地方,就會存在問題。現在從技術上提出新的辦法,就是車路協同。」在白皮書的釋出儀式上,同濟大學汽車安全技術研究所所長朱西產表示。
單車智能遇到的最典型困境,就是視線遮擋以及感知辨識演算法失效。比如在前方大車嚴重遮擋的情況下,即使在車端增加多個激光雷達,也是無法彌補的。相反,如果放在路端,可能只需要增加幾個網絡攝影機就可以解決,並且路端的網絡攝影機可以實作多車共享,利用率也將大幅提升。
白皮書以鬼探頭、前方大車避讓、路口非機動車闖紅燈以及異形的紅綠燈舉了多個案例:
① 這類場景就是常見的鬼探頭,行人突然從大車後走出,僅憑單車智能,自動駕駛車輛需要在極短的時間內進行辨識、決策和控制,容易引發事故。而路端器材則可以提前感知到行人或對向車輛的動向,為自動駕駛系統預留充足的響應時間。
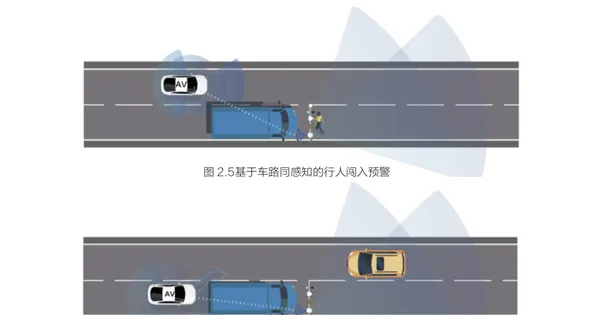
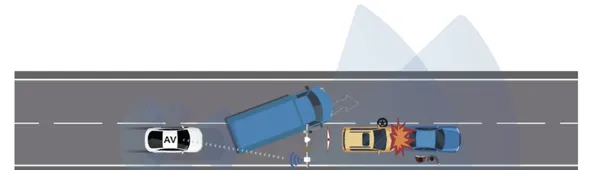
② 跟車過程中,本車道前方發生交通事故,前方大車臨近時突然避讓,可能導致後方自動駕駛車輛避讓不及。同樣,路端感知器材可以提前發現事故,並通知自動駕駛車輛提前進行決策規劃。
③ 在十字路口,自動駕駛車輛綠燈起步時,橫向車道有非機動車違規闖紅燈快速切入本車車道,車路協同配合也能提前感知,避免事故發生。
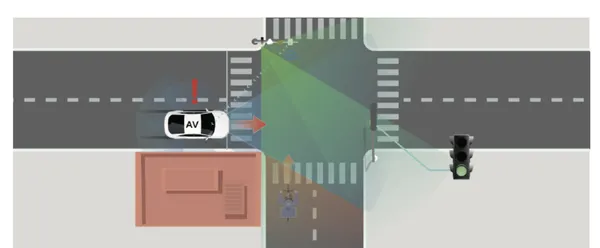
④ 各地紅綠燈的設定各異,視覺感知演算法在異形紅綠燈面前很可能會失效,此時透過紅綠燈與車路協同的融合,可以解決紅綠燈的辨識問題。

如果把單車智能比喻成是在黑夜中為司機照亮前路的車燈,在車燈的照耀下,車輛行駛依然存在不可避免的盲區。而車路協同的作用就類似於路燈。車燈與路燈結合才能為車輛安全駕駛護航。
一旦系統的安全性提高,其ODD可執行範圍就能有效地擴大。
最後剩下的問題是,車路協同建設如何在保證安全性、擴大ODD的基礎上,依然能做到降低自動駕駛系統的成本。
解決了這個問題,車路協同與單車智能結合必然成為自動駕駛技術快速商業化落地的最優解。
三、分級建設:在中國構建車路協同的可行方案
關於車路協同的技術構建有一個常見的誤區:車路協同的基礎設施建設是非常昂貴的,要遠遠超過單車智能的改造投入。
實際上,根據【面向自動駕駛的車路協同關鍵技術與展望】的白皮書測算:在一定規模下,VICAD智能化道路所需的升級改造成本要低於單車智能。
據交通運輸部【2020年交通運輸行業發展統計公報】數據顯示,截止到2020年末,全國四級及以上等級公路裏程494.45萬公裏,高速公路裏程16.10萬公裏,全國城市道路45.90萬公裏。全國汽車保有量有2.81億輛。由此可以推算出,只要在每輛車上節省1.98萬元的成本,就可以在每公裏的道路上投入100萬元的智能化改造。
而如果前期重點選擇車流密集一線城市進行試點改造,因為利用率高,實際上分攤到單車的改造成本更低。
以北京為例說明,只要在每輛車上節省1518元的成本,就可以在每公裏的道路上投入約50萬元和每個路口投入81.84萬元的全部智能化器材升級改造。
中國擁有公路 501.25萬公裏,高速公路14.26萬公裏,要在如此龐大的公路體系上一次性大面積改建智能化公路,是不現實的。
因此,除了重點城市先行試點建設之外,【白皮書】還提出了:中國智能道路的發展應兼顧各地公路不同的功能需求,將智能公路的智能化等級進行劃分,不同公路采用不同的智能化等級為目標進行規劃與建設,也就是分級建設的路線。
【白皮書】根據道路智能化水平分為C0 - C5級6個等級,道路智能化等級越高,對車輛智能化要求也越低,覆蓋的智能汽車等級範圍也越廣。
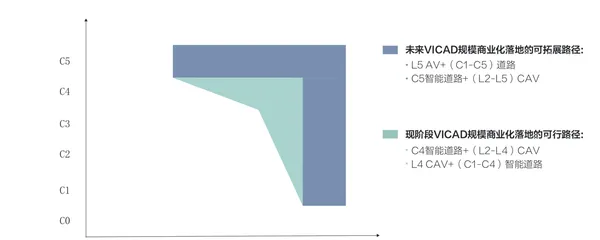
其中,C4級別的道路特別值得關註。C4級道路可同時支持L2+ - L5級的自動駕駛車輛行駛。
什麽意思呢?就是一輛L2+級別具備輔助駕駛功能的車型經過C4級道路,也能變成高度自動駕駛車輛。
除此之外,高等級的智能道路還可服務於智慧城市,形成城市交通的車路雲一體化智能化管控,提高通行效率、保障安全。
總得來說,【白皮書】提出的車路協同智能道路建設解決方案是:以重點城市率先試點,道路分級建設,其中C4級智能道路的建設對自動駕駛的大規模落地將起到重要的加速作用。
四、自動駕駛中國方案:最強單車智能+車路協同
車路協同的落地與單車智能不同,單車智能與汽車行業的關聯最大,而車路協同橫跨了汽車、交通與通訊三大行業,因此在技術落地上需要至少三個行業的協同。
朱西產認為:「只有在中國具有頂層設計的能力,並且政府對於產業有很高的把控程度,車路協同才更容易實作。」
清華大學智能產業研究院 (AIR) 院長張亞勤認為,車路協同恰恰也是中國在智能交通和智能汽車上獨特的方案和優勢。

百度是自動駕駛領域技術能力最強的公司,清華大學是「車路雲一體」的網聯智能在中國最早的提出者和踐行者。此次清華大學智能產業研究院 (AIR)與百度Apollo聯合釋出的白皮書可能是全球範圍內第一次釋出在車路協同方面的理論參考框架,對全行業針對車路協同的技術落地路徑和方案有深度的思考和解讀,對形成產業共識有重大意義。
從2004年的DARPA挑戰賽至今,這一輪的自動駕駛產業技術發展已有超過17年時間。Google正式投入自動駕駛技術的開發則已經有超過10年時間。
中國自動駕駛如何實作彎道超車,率先安全落地?車路協同的建設將是必經之路。









