@ Yifan Hou 說得非常對,基於關節電流環的反饋基本只適合於直驅無減速器的機器人,學術上現在很少看到基於電流環反饋估計力矩的文章了(印象中看到最新的一篇相關文獻是八十年代的),原因@ Yifan Hou 也分析得也很仔細。
當然,透過電流反饋做一些很粗糙的力估計(比如 @ robotopia 所說的觸停)理論上還是可行的,但它有一個小缺陷。
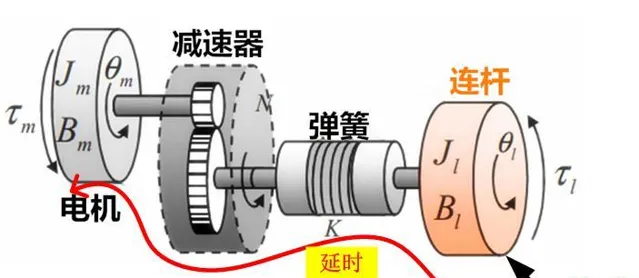
上圖是機器人一個關節的模型簡圖,由於諧波減速器等的柔性,導致在整個傳動鏈中,相當於有一個彈簧K。當我們在負載連桿端施加外力時,由於彈簧的緩沖作用,這個外力反向傳輸到電機端,並被電機感知時,必然會有延時和衰減。若外界沖擊特別大,這種延時可能會讓電機不能及時停止,而產生危險。
機器人中的力傳感器主要分為兩類:關節部位的單軸扭矩傳感器和機器人末端的6軸力傳感器。第一類傳感器價格並不算很貴,而且國產的一些效能也不錯,我們這邊都是買的一家國內公司的,量程50Nm的5000左右,跟HD的諧波減速器價格相當;而第二類就非常昂貴,稍微好點的就得4,5萬,沒有什麽好的國產替代品。第二類我們沒有適應經驗,這裏主要分享下第一類的使用情況。
我們知道,現在伺服系統中的位置傳感器精度非常高;然而力矩傳感器遠沒有位置傳感器那樣,我們買的精度大概為0.2Nm。據文獻中報道,他們的力矩傳感器訊號標準差為0.35Nm,根我們的精度差不多。

另外,機器人中安裝有力矩傳感器,還有一個更致命的缺陷:剛度大大降低。上圖是我們裝了力矩傳感器的電機,圓圈內的即為傳感器,它測量力矩的基本原理是內外圈之間有形變(類似於彈簧)。再聯系最上面一幅圖,當系統中裝有力矩傳感器後,傳動鏈上會有明顯的變形,也即系統的剛度相比於沒有力矩傳感器的,會下降很多。經過粗略計算,一塊與力矩傳感器大小一樣的鋼板,其剛度是它的近10倍。
我們知道,傳統機器人在做位置控制時,是希望傳動剛度偉大越好的(比如機床)。當剛度過低時,不光是控制精度下降,系統也容易不穩定。
接下來,我們實際看下力矩傳感器訊號如何。我們只控制電機端完成一定的位置軌跡追蹤,同時測量出力矩傳感器的訊號。
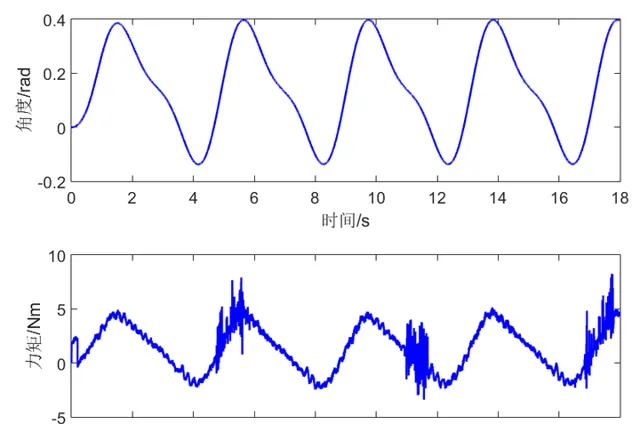
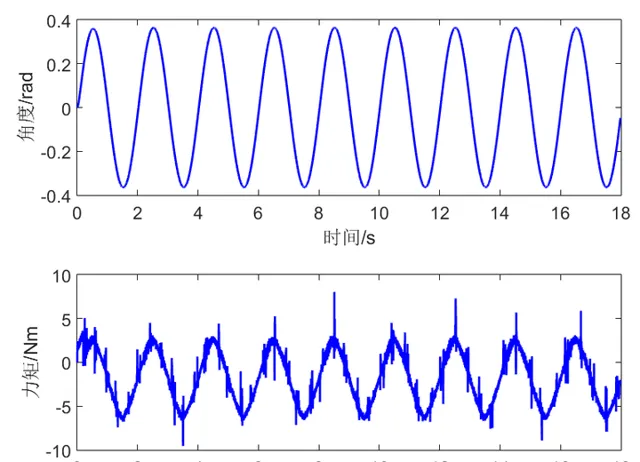
可以看出,訊號質素並不是很好,這跟系統剛性下降有關。回到第一幅圖,電機端的運動,經過中間的彈簧後,再傳到連桿端;由於彈簧剛度系數較其他部份小很多,導致電機運動經由彈簧後產生了波動,進而導致電機與連桿間的偏差角有波動,最終使得測量的力矩不夠穩定。這種不穩定的力矩訊號,直接用來做力估計與力控制也是不切實際的。
電流環反饋實際套用前景有限;
力矩傳感器的引入會降低系統穩定性;
單靠力矩傳感器做力控制效果不佳;
現在一般是透過雙編碼器加力矩傳感器來做精密力控制;










