最近研究了一下kd-tree,并且用python实现了,代码见文末链接。
kd-tree是k-dimensional tree的缩写,主要用来做空间索引,包括范围搜索和最近邻搜索,2分查找树可以看做是kd-tree在一维情况下的一个特例。
构造K-d tree
2分查找树是对1维数据做分类索引,但扩展到2维的情况下就不太适用。例如要查找距离(2, 3)最近的点,如果只根据x的值进行2分查找可能会得到错误的结果,因为距离还和y的值有关。这时候就需要用到kd-tree,对x和y 2个维度做划分。
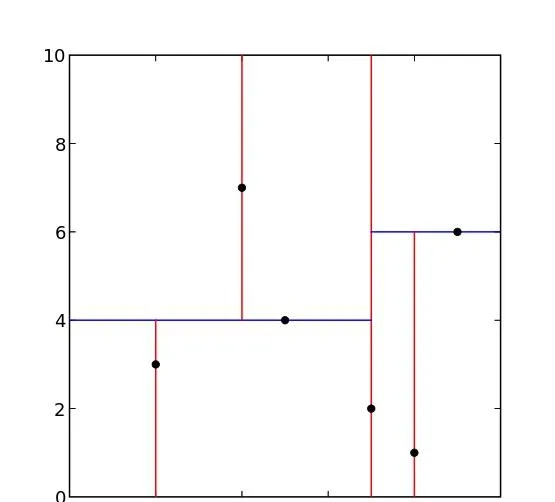
kd-tree的构造过程是交替的根据当前数据的不同维度进行切分,例如假设为2维度数据(x,y),root节点先根据x轴进行划分,得到左右2个部分,然后再分别对左右2个部分根据y轴进行划分,依次进行,直到划分的区域内只有一个节点。以下是2维K-d tree的示意图,同理可以扩展到N维度空间。
上述构造过程种最需要注意的是如何对数据进行切分,要平均划分就需要找到当前维度的中间值,有3种获取中间的方法。
- 根据堆排序或者归并排序对数组进行排序,时间复杂度 O(nlog^2n)
- 通过中位数算法 [1] 找到中间值,时间复杂度 O(n*logn)
- 实现对k维的数据进行排序并且保存,然后利用排序好的信息。时间复杂度 O(k*n*logn)
下面的示例代码是采用方法1构造K-d tree:
def
get_k_median
(
arr
,
axis
):
arr
.
sort
(
key
=
itemgetter
(
axis
))
return
len
(
arr
)
//
2
def
_construct
(
self
,
points
,
depth
)
->
Node
:
if
not
points
:
return
None
axis
=
depth
%
self
.
_k
median
=
get_k_median
(
points
,
axis
)
node
=
Node
(
points
[
median
],
axis
)
node
.
left
=
self
.
_construct
(
points
[:
median
],
depth
+
1
)
node
.
right
=
self
.
_construct
(
points
[
median
+
1
:],
depth
+
1
)
return
node
查找
k-d tree有以下2种查找方式:
查找最近的节点
查找最近的节点需要用到回溯算法,先找到叶子节点,计算2者之间的距离,由于叶子节点不一定是最近的节点,因此还需要判断是否相邻区域是否比当前叶子节点的距离更短。
def
_query_nearest
(
point
,
node
,
nearest
,
distance
):
if
not
node
:
return
if
point
[
node
.
axis
]
<=
node
.
value
:
_query_nearest
(
point
,
node
.
left
,
nearest
,
distance
)
else
:
_query_nearest
(
point
,
node
.
right
,
nearest
,
distance
)
if
point
[
node
.
axis
]
<=
node
.
value
:
if
point
[
node
.
axis
]
+
distance
[
0
]
>
node
.
value
:
# check parent node
t_distance
=
euclidean_distance
(
node
.
element
,
point
)
if
t_distance
<
distance
[
0
]:
distance
[
0
]
=
t_distance
nearest
[
0
]
=
node
.
element
_query_nearest
(
point
,
node
.
right
,
nearest
,
distance
)
else
:
if
point
[
node
.
axis
]
-
distance
[
0
]
<
node
.
value
:
# check parent node
t_distance
=
euclidean_distance
(
node
.
element
,
point
)
if
t_distance
<
distance
[
0
]:
distance
[
0
]
=
t_distance
nearest
[
0
]
=
node
.
element
_query_nearest
(
point
,
node
.
left
,
nearest
,
distance
)
查找半径内的节点
和查找最近的节点类型,只要把距离改成固定的值,如果查找的节点和给定点的距离在半径范围内,则添加,反之亦然,最后得到在指定点半径范围内的所有点。
def
_query_radius
(
point
,
node
,
plist
,
radius
):
if
not
node
:
return
if
point
[
node
.
axis
]
<=
node
.
value
:
_query_radius
(
point
,
node
.
left
,
plist
,
radius
)
else
:
_query_radius
(
point
,
node
.
right
,
plist
,
radius
)
if
point
[
node
.
axis
]
<=
node
.
value
:
if
point
[
node
.
axis
]
+
radius
>=
node
.
value
:
t_distance
=
euclidean_distance
(
node
.
element
,
point
)
if
t_distance
<=
radius
:
plist
.
append
(
node
.
element
)
_query_radius
(
point
,
node
.
right
,
plist
,
radius
)
else
:
if
point
[
node
.
axis
]
-
radius
<=
node
.
value
:
t_distance
=
euclidean_distance
(
node
.
element
,
point
)
if
t_distance
<=
radius
:
plist
.
append
(
node
.
element
)
_query_radius
(
point
,
node
.
left
,
plist
,
radius
)
总结
上述只考虑了构造和查找的过程,还没有包括添加、删除和再平衡的方法。当然有一些极端情况也需要补充,例如节点中某一维度有相等值的情况。
kd-tree的完整代码实现
参考
- ^https://en.wikipedia.org/wiki/Median_of_medians











