近两年自动驾驶技术一直炒的火热,作为百年汽车工业史上又一次伟大的转移,它可以说重新定义了汽车产业规则。 让汽车不再是「四个轮子加一套座椅」,更像是一个「行走的第三空间」 ,可以说自动驾驶的发展是一个必然的趋势。
但对行外人来说,自动驾驶吵得再火热他们也是听个热闹。而且就目前而言,自动驾驶汽车技术还有相当曲折的路要走。今天小欧就尽可能用简单的话术系统的给大家介绍一下自动驾驶。
首先,我们先大致了解一下什么是自动驾驶汽车?
自动驾驶汽车(Autonomous vehicles;Self-driving automobile )又称无人驾驶汽车、电脑驾驶汽车、或轮式移动机器人,是一种通过电脑系统实现无人驾驶的智能汽车。在20世纪已有数十年的历史,21世纪初呈现出接近实用化的趋势。自动驾驶汽车依靠人工智能、视觉计算、雷达、监控装置和全球定位系统协同合作,让电脑可以在没有任何人类主动的操作下,自动安全地操作机动车辆。
其结构一般分为:感知系统、决策系统、执行系统3个部分。
简单来说,自动驾驶系统其实就是请了个司机代替你的眼睛、大脑、手、脚,最后做出反应。
当前,关于自动驾驶的分级, SAE(国际汽车工程学会) J3016文件曾提出的五级自动驾驶分级方案,这也是被自动驾驶领域和国际社会普遍认可的,从辅助驾驶(L1、L2)到自动驾驶(L3),再到无人驾驶(L4、L5)。至于我们常说的自动驾驶,其实就是L3。
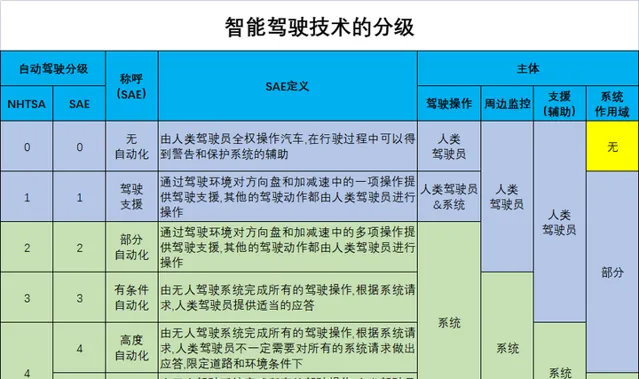
关于上面的定义,从另一个角度理解就是:
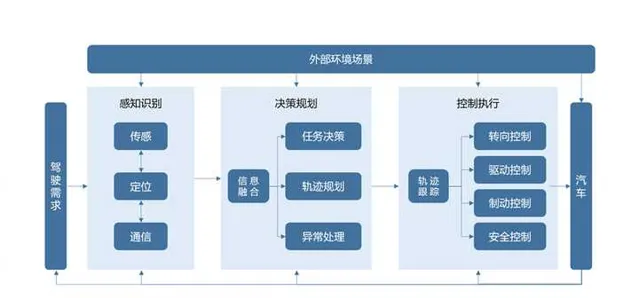
跟人类驾驶一样,我们需要先观察路况,然后脑海里做决策,手脚再配合执行。自动驾驶亦是如此,所以它的技术框架核心也是分为 感知识别、决策规划、控制执行 三部分。
1、感知识别
尽管自动驾驶汽车已经学会了识别固定的红绿灯和移动的行人,但是它们依然无法适应所有的新情况,尤其是在高速、复杂的城市环境中,归根究底还是感知系统有待加强。
感知系统作为人工智能系统的出发点、人工智能系统的重要模块,也是人工智能系统成功的关键。 在自动驾驶系统中,感知系统由传感器+算法+计算平台组成,三个模块的有机结合促成无人车具有像普通人一样的感知能力。
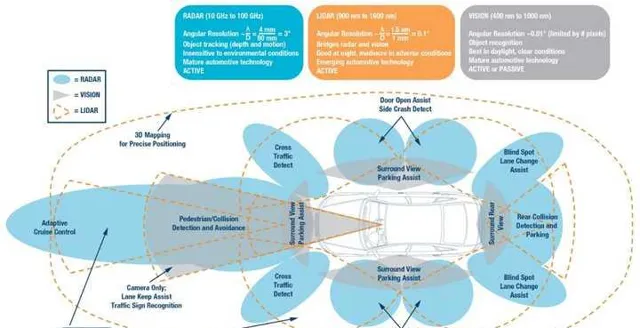
不同的传感器提供不同类型的信息,并具备不同特点。
如相机可提供2D图像;激光雷达可提供周围环境的三维信息;红外相机可用于夜间的环境感知。例如L2技术更多使用摄像头与毫米波雷达、L4技术需要使用激光雷达(LiDAR)。但激光雷达传感器还存在许多问题,譬如稳定性方面的问题。
很多LiDAR红外激光器在波长稳定性方面面临不少难题,例如:随着工作温度的升高,波长偏差量也同时提高,甚至会导致LiDAR系统的「视觉」便会出现模糊。
目前艾迈斯欧司朗全新的芯片设计 可将波长偏差量降低至10纳米 ,大大提高了环境图像的清晰度和锐度,但在助力自动驾驶进入新「视界」这条路上,我们还有很长的路要走。
2、决策规划
决策系统主要是依据感知信息来进行决策判断,确定适当工作模型,制定相应控制策略,替代人类驾驶员做出驾驶决策。这部分的功能类似于给自动驾驶汽车下达相应的任务。
例如在车道保持、车道偏离预警、车距保持、障碍物警告等系统中,需要预测本车及相遇的其他车辆、车道、行人等在未来一段时间内的状态。
先进的决策理论包括模糊推理、强化学习、神经网络和贝叶斯网络技术等。
由于人类驾驶过程中所面临的路况与场景多种多样,且不同人对不同情况所做出的驾驶策略应对也有所不同,因此类人的驾驶决策算法的优化需要非常完善高效的人工智能模型以及大量的有效数据。
这些数据需要尽可能地覆盖到各种罕见的路况,而这也是驾驶决策发展的最大瓶颈所在。
3、控制执行
自动驾驶的执行是指系统在做出决策后,按照决策结果对车辆进行控制。

车辆的各个操控系统都需要能够通过总线与决策系统相连接,并能够按照决策系统发出的总线指令精确地控制加速程度、制动程度、转向幅度、灯光控制等驾驶动作,以实现车辆的自主驾驶。
而这三部分的核心技术,如果细化下来其实都是依靠一个个模块实现的。
像 算法 (现阶段,感知算法与决策算法模块是自动驾驶技术的瓶颈,仍有待优化)、 计算平台( 高计算能力、低功耗 ) 、传感器(上述说的激光雷达(LiDAR)其实就是传感器模块里很重要的一部分)以及 测试手段 (包括真实道路测试、仿真回归测试)等等。
在光学传感器这块,一直是艾迈斯欧司朗研究关注的重点,但关于感知系统的研究永无止境,而艾迈斯欧司朗也将持续在光学领域不断地进行投资与研究,也欢迎大家持续关注艾迈斯欧司朗 @欧司朗中国照明,了解更多汽车自动驾驶领域知识。










