正巧,我有个好朋友就是做这个纯视觉算法的博士,之前在墨尔本大学做,前年入职京东了。
他跟我说过纯视觉其实是无解的,就是说必定是一条死路。
先讲下纯视觉算法的难度点在哪里:计算机得到的图像是连续的平面,必须依赖算法从平面构建一个三维空间。
啥意思呢,相当于我给你一张房间的照片,你就把每样东西的大小,景深,全部给搞定了。从算法上这没问题,但鲁棒性(这词没法翻译成稳定性,为了严谨)没法保证。
这东西不靠谱的地方是数不胜数的,随便说几个:
1.现在我拍照的镜头稍微有一点歪,出来的照片实际数据会不会不一样?或者我的车头整个都歪了呢?
2.现在是深夜,能见度很低,我的镜头在那么多噪点的情况下是否还支持我高速行驶?
2.5 已经出现过的纯视觉车祸,一个是逆光无法识别翻导的白色厢式货车,一个是老旧隧道从外进入直接追尾黑色车。
3.如果现在是大雾或者下雨,我怎么确保拍照得到的景象正确?比如一滴水在镜头上,导致焦距不一致。
4.纯视觉算法怎么搞定强逆光?!
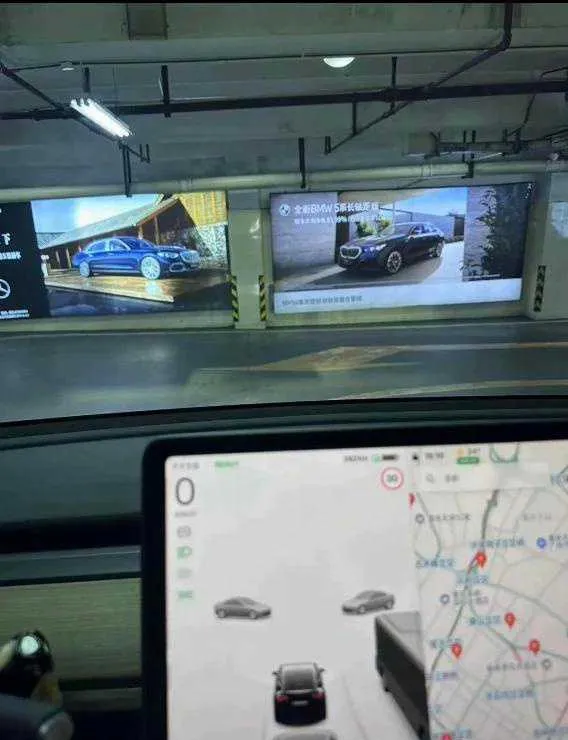
5. 现在你的车前面出现了一块巨大的2D画板,里面是一比一的3D的街景,请问你的视觉算法怎么搞定这个悖论?
6.接5,现在你的车前面有一块透明玻璃,你的纯视觉算法如何规避这一风险?
7.泥污遮挡怎么办?难道开到一半突然光速让驾驶员接手?
所以马斯克就是成本这项打不过中国车企嘴硬而已。特斯拉现在在同价位毫无舒适感,车机也一般,智能驾驶最好肯定是激光雷达+毫米波雷达+视觉,三管齐下才能应对复杂环境。现在的纯视觉方案连完全精准的泊车都做不到 评论区的特斯拉精神股东真的……多七八千的成本,给你多一次活下去的机会不好么?生命安全是可以随便用对某个人的盲目追随来换的?
很多马粉没搞懂啥意思,智能驾驶上,视觉+激光+毫米波,如果视觉说可以,激光说不可以,那么信激光;如果激光毫米波说可以,视觉说不可以,那么信视觉。人的眼睛可以开车,现在高端的车型一样有紧急避险,这样说够明确了吧?








