每年的國際消費類電子產品展覽會(後稱CES 2025),都受到不少行業內外人士的關註,畢竟這一定程度上代表了未來一段時間,消費者能切實體驗到的新產品、新技術。
而在這次的CES 2025上,追覓科技帶來的仿生多關節機械手技術,引起了不少人的討論。從具身智慧這一概念提出以來,第一次有品牌將這樣的「想象」變成技術落地。

當然從技術到實際的產品落地,估計也有不少朋友存疑。今天咱們就從這方面好好聊聊,這個掃地機器人品牌「跨界」服務機器人帶來的新技術,究竟是否可行!
一、具身智慧從想象到落地,還差了哪些?
1.具身智慧的形態一定是機器人嗎?
對於具身智慧,很多人第一時間想到的就是【銀翼殺手】或者是【黑客帝國】裏面的人形態智慧機器人,有著擬人的四肢以及外貌,能夠理解人類復雜的話語以及指令,與人類的差別可能只在於裏面是骨血還是機械結構。
而中國在去年就將人形態智慧機器人作為重點發展物件。23年11月,工信部就釋出了 【人形機器人創新發展指導意見】 ,將人形機器人稱作「繼電腦、智慧型手機、新能源汽車後的顛覆性產品」。
這也不是沒有道理的,如今的人類社會,所有的工具都是基於人類設計,方便人類使用,其中包括了桌子高度、走廊寬度、作業工具、電腦形態等等,如果希望一台機器人能夠服務於人類,無疑長成人樣會讓它更快適應到人類的環境中去。
現如今不少獨角獸企業都有推出人形態機器人,但從表現來看,光是走路都是一個巨大的挑戰。
人類在全身的自由度達到了76個,人形態機器人的自由度要超過60個,才能達到模仿人類姿態的「及格線」,並且控制自由度方式也不能是傳統方法區呼叫,需要AI更進一步發展,理解各個關節作用協調,才能完成「走路」像人的壯舉。
在感知方面,如今雷射雷達、深感網路攝影機等感知技術復用,在辨識率上已經高度精準,這也對於機器人的觸覺和力傳感器提出新需求。
在決策方面,人形態機器人還是依賴模組之間傳遞資訊,這樣端到端的形式,會大振幅影響決策速度,這也是我們看展品機器人時不時卡住不動的原因之一。
在執行器方面,想要模擬人類的手部抓取使用東西,要協調關節力度以及抓取姿勢,傳統吸盤式或者夾爪式手部已經不能滿足需求, 高精度靈巧手 是人形態機器人必須要克服的方向。
這樣來看, 人形態機器人還有很長的一段路要走 。
2.AI大模型的加入,使機器人可以「思考」
其實具身智慧這個概念提出了很久,但為什麽很多人覺得難以落地?因為具身智慧的核心是需要機器人去做決策,但早期的AI沒有「常識」,很難去做決策。
就比如下達一個指令「拿瓶可樂給我」,早期的AI會透過「找可樂」這一指令,逐步搜尋關聯「找可樂」的相關響應,可能最終搜尋到,可樂在冰箱中,給你做出「去冰箱找可樂」的建議。
而現如今具身智慧,不單只要理解「拿可樂」這個概念,還會貼合環境做出決策。首先會在桌面、地面、房間等顯而易見的地方尋找可樂,如果沒有找到,會進一步推理出,可樂可能放在冰箱或者廚房內,進而執行「開啟冰箱」,「找到可樂」的指令。
從這個角度看,具身智慧對於「找可樂」等命令詞匯的理解不局限於在哪裏,更是從人類習慣性角度出發,去思考決策,以及行動。
AI經過多次叠代後,現如今的AI大模型已經足夠支撐機器人完成「思考」,距離具身智慧,只差實體落地。

3.套用場景縮小,讓具身智慧可以落地
實體落地涉及的場景越多,需要做決策的地方也越多,機器人需要的算力、數據也就越大,這也給具身智慧落地增加了困難。
如果我們把套用場景縮小,具身智慧落地的可能性也就更大。就像輝達高級研究經理,具身智慧負責人Jim Fan說過:「我們對‘人類級別’的機器人技術如此癡迷,以至於忘了這只是一個人為的限制。 為什麽我們不從一開始就創造一個超越人類的新物種呢? 」
誠如Jim Fan所言,如今不少領域都已經有具身智慧落地的場景,在食品領域,炒菜機器人已經在多個城市布局,利用固定機械臂以及語音下單的方式,完成炒菜出鍋;在醫療領域,一些簡單手術已經可以透過機械手來完成,精準度完成度跟真人醫生無異。
可以看出,在專精領域中,具身智慧落地也變成了可能。
在家電領域中亦是如此,最近在CES 2025上也有著不少具身智慧的身影,其中追覓放出的仿生機械手技術,搭載在最新款的掃地機器人上,這也說明了具身智慧開始從商用,正式走入消費者領域,讓服務型機器人從白日夢,正式走向現實。
二、讓具身智慧初步落地,追覓機械手技術突破了哪些?
1.傳統掃地機器人面對的清潔困局
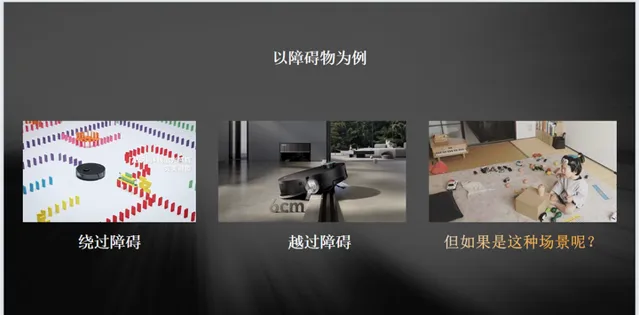
傳統掃地機器人一直給人一種很強的邊界感,這個邊界感就來自於避障功能。目前流行的雷射雷達+視覺的避障方案,能夠完美避開大型障礙物,甚至能夠貼著這些障礙物完成清掃,在清潔力上絕對是過關的。
但在遇到無法避開的障礙物,掃地機器人就產生「邊界感」了,就好比兒童房裏,經常會把玩具弄得滿地板都是,這時候掃地機器人只能繞著玩具進行清掃,這樣很容易就會產生衛生死角,導致清掃不幹凈,需要人工後期補掃或者人工把玩具歸類後才能完成清掃。
不單只是兒童房, 在面對家裏的夾縫時,掃地機器人也顯得力不從心:
像是冰箱兩邊的夾縫區域,掃地機器人完全進不去,延伸的機械臂也觸碰不到那麽深,同樣需要人工後期進行清潔;或者是更換家具擺放,盡量不留下縫隙,這樣掃地機器人才不會留下清潔死角。
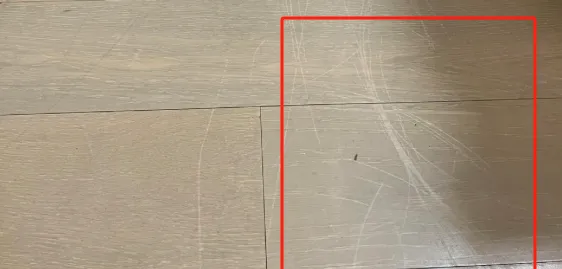
同時,在針對於不同汙漬的處理,傳統機器人只能在吸力上下功夫,遇到頑固汙漬就加大吸力,簡單又粗暴。
這樣一來汙漬是被清理掉了,但地面的瓷磚卻因為過高的扭力而留下劃痕;時間一久,本來光亮的地板都變得劃痕遍地,影響美觀不說,如果是木地板就直接損壞了。如果不想掃地機器人破壞地板美觀,只能是自己先行一步將頑固汙漬給清理掉。
不難看出傳統掃地機器人有著兩大缺陷:
①夾縫無法清潔:在面對復雜家庭環境的時候,掃地機器人無法做到100%覆蓋清潔,尤其是細小的夾縫,只能人工完成後期清潔。
②雜物多無法完成清潔: 在雜物多的情況下,需要先人工完成「整」的過程,機器人才能完成打掃 ,否則掃地機器人會選擇「避開」不打掃,從而形成衛生死角。
這些都是掃地機器人的硬傷所在,而想要突破這些缺點,或許掃地機器人需要前進演化成全新的姿態。
2.從「避」到「整」,追覓做了哪些突破
在CES 2025展會上,追覓展示的仿生多關節機械手就足夠驚艷,機械手伸縮自如的同時,能準確清理縫隙中的汙垢以及物品,還能將其準確放回位置,比如拖鞋放回玄關、玩具放回籃子等。
此外它還具備了自己的配件倉,透過自主判斷清潔場景、汙垢程度,選擇更換配件頭來完成清潔需求,全程無需人工幫忙,就把清潔、整理、排程、巡視、安全全方位覆蓋,極大拓寬了人們對於掃地機器人的想象。
①形:具身智慧的機械手。
從外形上看,這台掃地機器人跟普通掃地機器人並無二致,就連大小厚度都是對標傳統掃地機器人。而那只仿生多關節機械手就藏在這台掃地機器人之下,使用時,最上面的類跑車艙蓋會折疊開啟,從而使得機械手露出。
這只仿生多關節機械手在關節上極大模擬了真人手部的自由度,有著5個自由度關節,伸展距離達到成年人臂長一般,約30cm,能夠輕松伸進家裏的任意夾縫進行清潔。
同時這一仿生多關節機械手可以夾起6cm直徑、400g以內重量的物體,這樣一來,讓掃地機器人除了清潔之外,多了項整理能力,可以實作整理歸納物品,真正實作不需要人工幹預,完全解開雙手。
而能實作這一原理,歸功於AI大模型的搭載,使得機械手能夠完成真正擬人的「決策」:
1.先判斷是否有感知物體2.判斷物體的抓取點
3.采用合適的姿勢匹配
4.再放到合適的地方
前面說到具身智慧對比早期AI區別,就在於對於物體的「思考」以及「執行」,而追覓仿生多關節機械手無疑已經具備了具身智慧的種種條件,可以說是掃地機器人全新進階姿態,也是具身智慧想象落地於現實的完美案例。

②看:雙相機協同
為了實作機械手和掃地機器人之間的協同,追覓打造了雙相機系統;在掃地機器人身上有著雙目網路攝影機,主要用來辨識地板上的物體:包括紙巾、玩具、鑰匙、數據線、汙漬等等復雜物品。
同時在機械手上也有著RGBD網路攝影機,主要用於物品抓取點,多一個視角重建障礙物點雲,透過兩個視角進行物品整體的點雲重建,確認抓取點。
這就能保證在抓取任何物體的時候,都有用上最合適的姿勢,而不會發生「抓不穩」、「抓不準」、「抓錯了」等問題。
在此背景下,機械手就需要足夠的扭力,也就是抓力,但想要完成上述抓取物體,以及收納進掃地機器人中,就要求機械手和電機要做的足夠強大且輕薄,但目前市面上的供應商普遍都在26mm,並不能滿足需求,因此追覓選擇了自研,打造出6Nm扭矩、18mm厚度的電機,成功解決市面電機厚重寬大的問題。

③潔:大模型排程
不單只是機械結構上需要雙向協同,在軟體上亦是如此。追覓掃地機器人具身智慧大模型,其中一個是基於視覺的模型,主要用來感知周圍環境,辨識面前是否有雜物、雜物的型別、以及雜物歸類等問題。
第二個則是決策模型,這個模型主要是對目前環境做出判斷,以及技能序列的輸出。
正是依靠大模型加持,在地面雜亂無章的情況下,追覓掃地機器人已經可以透過機械手獨立處理物體,但處理物體的型別、放置位置、是否幹凈,都需要依托大模型的能力執行行動。
1.分類邏輯:拖鞋放在玄關/玩具放到玩具房等2.順序邏輯:先去處理幹凈的東西/先去處理離你近的
3.較難任務:面對密集堆積的東西,挨個撿走
這也讓追覓掃地機器人在清潔完成後,會使用機械手對雜亂區域進行物品整理歸類,再進行補漏清掃,確保沒有打掃死角。

每個人的家庭環境都不同,有時候地板上會出現不該抓取的物體,比如蛋糕、沾水的杯子,這時掃地機器人會根據前端多模態視覺模型,抽取出該物品是否該抓取,無需擔心抓錯物體導致機械損壞。
④凈:多維度清潔
上面提到,傳統掃地機器人只能在平面清潔,無法深入到縫隙以及多維度清潔,而追覓掃地機器人,在仿生多關節機械手加持下,能夠輕松應附家居之間的狹窄縫隙。
而且在面對不同的汙漬時,追覓掃地機器人還會更換配件,在獨立的配件倉中有著面對不同地面、不同材質的清潔工具,能夠辨識場景需求以及贓物情況,以更換海綿刷、毛刷等配件,不存在無腦加大扭力清潔,從而給地面或者家具留下劃痕。
值得一提的是,雖然加裝了仿生多關節機械手,但沒有犧牲厚度以及清潔能力作為交換,依然跟X50 Pro保持一致,包括裏面的架構,包括吸塵、滾刷、機械臂外擺等技術。
3.「掃地」跨界「服務」,為什麽追覓能做到?
不可否認,當下具身智慧概念越來越火熱,人形態機器人走進千家萬戶還為時尚早,但追覓打造的掃地機器人全新進階形態,讓我們切實看到了具身智慧的階段性進展,但同時也讓人想問,不少國外廠商早就進入了具身智慧的領域,但偏偏為什麽是國產追覓可以做到先落地呢?
首先是有著 豐富技術儲備 。在高速數位馬達、智慧演算法等方面,追覓科技擁有一系列授權專利並處於全球領先地位。截至2024年9月30日,追覓科技全球累計 申請專利達6004件 ,已累計獲得 授權專利2637件 。
再者就是 超前的眼光 ,據了解,早在2023年4月,追覓就在研究仿生多關節機械手,如今看到的已經是第三次重構的結果,將掃地機器人和仿生多關節機械手結合起來,使得掃地機器人開始步入服務型機器人,為具身智慧概念落地提供了堅實的硬體基礎。
同時追覓多年在國內外發展,有著堅實的供應鏈作為基礎,再有執行力強勁的自有工廠,這些條件都為追覓提供了強悍的研發能力,確保能夠交付出穩定、好用、大幅提升生活品質的機器人。
而這一次,搭載【仿生多關節機械手】的掃地機器人,在具身智慧領域,追覓也從行業領先,變成行業引路人。

三、CES2025展會,追覓還帶來哪些「新東西」?
作為全球家電展會,追覓帶來的驚喜當然不只是展望未來,更有當下優秀產品和技術值得一看。

1.其他新技術
智慧換拖布系統,其實早在此前的追覓海外產品中就有類似的功能,不過此前的功能是回到基站拆卸掉拖布,防止打濕地毯。
而現在則是它的Pro Max版本【智慧換拖布系統】,在面對不同材質、不同環境的時候,會智慧選擇更合適的拖布進行清潔,防止對地板地面造成傷害。
比如面對木地板時,由於木地板容易損壞,這時候就會更換更柔軟的拖布;在碰到洗手間時候,則會更換成更吸水的拖布,保證更高的吸水性。

2.一些新產品
①X50 Ultra 掃地機器人
X50 Ultra成功拿下CES 2025國際突出獎等諸多獎項,其搭載的追覓全球首創的仿生機械足技術,能夠實作最高 6cm越障高度,無懼陽台廚房的滑軌和台階,輕松完成「越階」。
同時,它還擁有自升降全景雷射雷達,透過智慧辨識床底、沙發底等狹小場景,將頂部雷射雷達放下,保障能夠穿梭底下,完成清潔任務。
搭載的仿生雙機械臂技術,也讓X50 Ultra能夠清潔家裏的邊角死角。

②p5 Pro Heat洗地機
傳統洗地機最大缺點不是清潔不幹凈,而是殘留的水漬造成二次汙染。
而追覓展出的p5 Pro Heat洗地機,就很好的解決了這個問題,透過搭載了追覓靈捕智慧升降機械臂技術,透過一「貼」、一「刮」實作高效的清潔,不殘留水漬。
這個功能讓洗地機實作感應場景,在能感應到邊緣,AI 智慧升降機械臂會自適應下壓並快速貼 邊,完成角落清潔;在回拉時,機械臂則主動下壓,透過刮條處理水漬,配合浮動齒梳擠出滾刷中的水分,從機器內部和外部同時解決水漬殘留問題。
同時新升級的機械臂,結合機器本身的雙貼邊設計,讓 p5 Pro Heat 做到了真正的三重貼邊覆蓋,解決了墻壁和邊緣清潔的難題。

③Z40 Station吸塵器/Z30 吸塵器
在吸塵器方面,追覓也是展出了Z40 Station和Z30兩個型號。Z40 Station吸塵器有著310AW 的強大吸力,透過電機強化、風道最佳化和電池技術創新三大突破,實作了輕量化與高效能平衡,長時間使用也不累手。
同時,全地形刷 2.0 和豐富吸頭的設計,滿足了不同地面和場景的清潔需求,140°大廣角綠光顯塵技術,讓清潔更徹底。
在基站方面,追覓透過兩級同步集塵技術和等離子除菌技術的升級,將吸塵器基站的整體清潔能力提升至 2.0 時代。

再來看看追覓Z3 智慧感應吸塵器,支持智慧感應臟汙功能,搭載了追覓自研的15萬轉的高速數位馬達,有著300AW的吸力表現,面對灰塵、紙屑垃圾、毛發都能輕松吸取,配合上長達90分鐘的續航表現,足夠面對日常家務清潔。
同時,它還搭配了多款配件,支持一機六用,在切換吸頭後可實作寵物毛發清理、吸塵、床褥除蟎、車內縫隙等立體清潔,實作了家庭清潔的全方位覆蓋。

四、最後的結語
如今業界都在追趕AGI的浪潮,相較於短時間難以投入使用,技術形態也更復雜的人形服務機器人,具身智慧的追覓掃地機器人無疑讓人眼前一亮。
即使當下加裝【仿生多關節機械手】的掃地機器人,在能力拓展上相對有限,但相對於集智慧、機械最終幻想中的人形機器人,這一條追覓探索出的道路,已經具備了可行性和落地性,相信未來隨著掃地機器人不斷發展,相信追覓會帶來不一樣的驚喜,讓我們拭目以待。






