自然界中到處可見自組織的動物群體,大量智商簡單的個體利用局部交互作用,足以產生令人印象深刻的全域行為,進而讓整體協作的表現大於其各個部份的總和。
這種現象通常出現在昆蟲群、鳥群和魚群之中。其中,魚群就有著非常突出的表現。
它們成千上萬條相互結伴,在海洋中遷徙,在珊瑚礁中穿梭,一起高效協作尋找資源、食物,甚至會動態組成各種形態,調整遊動速度,以捕獲獵物或躲避掠食者,更神奇的是,這一切並不依靠某個魚群領袖來指揮。
圖|海洋中的「魚群風暴」應對鯊魚襲擊
魚群的集體行為主要依靠「隱性協調」:即個體魚類能基於對身邊同伴的視覺觀察做出決策,一些魚類在低能見度條件下,還可以利用身體側線感知「鄰居」,這讓魚群成功地解決了水下通訊的挑戰,實作了族群的可延伸性和健壯性。
這種分散的、自主的組織和協調方式,長期以來吸引著科學家摸索,尤其是在機器人領域,數學家和工程師們試圖破解從局部互動到全域行為的對映,以期讓機器人的集體行為更加強大。
來自哈佛大學的科學家們就從魚群中汲取靈感,研發出了一批水下機器人,這種機器人可以像真正的魚群一樣同步運動,且不需要任何外部控制。 同時,他們也首次利用水下機器人展示了具有隱性協調的復雜三維集體行為,該論文發表在【科學機器人】( Science Robotics )上,並被遴選為 2021 年 1 月份的月度封面。

圖|封面(來源: Science Robotics )
水下機器人難「組團」
事實上,透過科研人員的編程工作,成群的、有組織的機器人運動,對人們來說並不陌生。
例如,在空中領域,大型無人機群已經可以表演復雜的排列演習,但需要依靠集中式基站或外部全域的位置資訊,而不是本地和自組織的交互作用;在地面上,很多爬行或輪式機器人也能進行不同的組織排列和排程,但依賴於機器人之間交換 GPS 位置或透過信標來推斷相對位置,最典型的套用可能是倉庫中的搬運機器人;此外,能組團跳舞、表演節目的機器人也數不勝數。
與上述空、地機器人相比,水下機器人尚未實作類似的組織水平,其中一大障礙便是傳統的地上通訊方法(比如無線電)在水下的效能很差,而且位置定位方法(比如 GPS)幾乎不可用。
此前,業內已有研究小組曾透過設計新的通訊和定位方法來進行更復雜的水下協調,比如利用光學/聲學數據機,搭建異構的機器人群體,這需要增設水面輔助機器人和浮動基站等,透過多模式通訊和任務專門化來實作更復雜的操控,但這種解決方案大大增加了工程和控制的復雜性。

圖|機器魚與真正的魚在一起遊動(來源:Berlinger)
怎樣才能用更低成本讓機器人群像魚群一樣,具有無縫、連貫的協調性和高度的可操作性,並且獨立於外界輔助技術呢?這就是組織水下機器人群體運動的研究難點。
「機器人經常要被部署在人類無法接近或危險的地區,在這些地區,人類甚至不可能進行幹預。在這種情況下,擁有一個高度自治、自給自足的機器人群很有必要。 透過使用隱式規則和三維視覺感知,我們能夠建立一個在水下具有高度自治性和靈活性的系統,即使是在 GPS 和 Wi-Fi 等通訊訊號無法存取的情況下。 」 該論文的作者之一弗洛瑞安·伯林格(Florian Berlinger)說道。
三種組織形態,靈活組合
目前,伯林格是哈佛大學約翰·保爾森工程與套用科學學院(SEAS)和衛斯生物啟發工程研究所的一名博士,他所在的研究小組給出了一種解決方案:給每個機器人小魚裝配上 LED 燈,並基於此開發了一套水下視覺協調系統。
這項研究中,單只機器小魚被命名為「Bluebot」,研究人員共組裝了 7 只,它們組成的系統則被稱為「Blueswarm」。
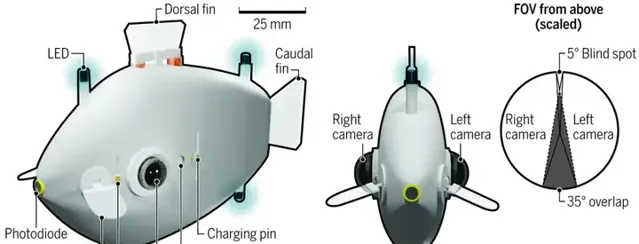
圖|Bluebot 的關鍵元件(來源:Berlinger)
Bluebot 的功能設計包括三個主要模組:
機載魚眼鏡頭相機可檢測到最遠 5m 相鄰 Bluebot 的 LED 燈光和閃爍訊號,並使用自訂演算法確定其距離、方向和航向。
僅使用基於視覺的局部互動,研究人員報告了幾個自組織的水下機器人集體行為範例,這些行為包括協調同步時間,空間受控分散和動態旋轉運動等,最後以多種行為的組合來實作搜尋任務操作。
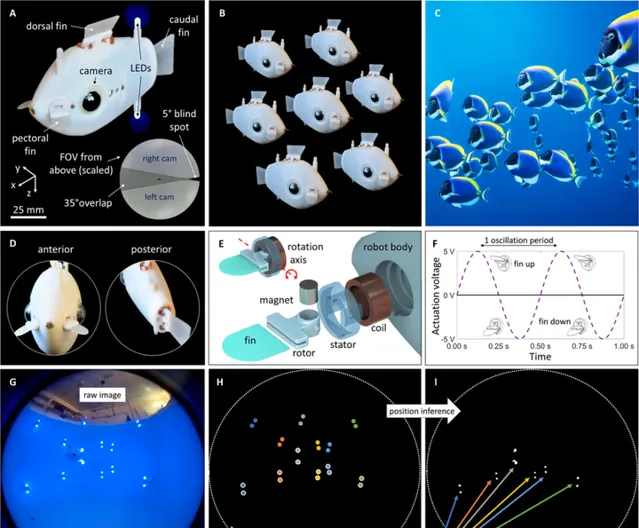
圖|Blueswarm 平台(來源: Science Robotics )
所有這些都可以透過使用非常簡單的通訊方式來實作,並且在位置感測或控制方面沒有任何外部輔助,這成功驗證了三維空間中隱式、自組織和分散協調的水下機器人集合的概念。
具體而言,這項工作大概有 3 個關鍵的環節需要實作:
1、跨時間的自組織。就像螢火蟲透過閃爍來吸引伴侶一樣,7 個 Bluebots 機器人的 LED 同時閃爍,相互之間會觀察相鄰同伴的閃爍情況,並在經過三輪不同步閃爍後,調整各自的閃爍周期以實作同步。
這種針對多機器人、分布式情況的「螢火蟲同步演算法」也有一個專業名詞,叫做 Mirollo-Strogatz 模型。
2、跨空間的自組織。有科學研究認為,一條魚在魚群中,距離的控制受到附近鄰居的虛擬力影響,距離太近的鄰居會排斥,距離太遠的鄰居會吸引,盡管虛擬力的確切形式仍未知。
但研究人員也是借用這種原理,Bluebot 用視覺來確定鄰居的相對位置,並在沒有任何直接交流的情況下做出含蓄的反應。不管采用哪種方法,虛擬力模型的結果都是一樣的: 機器魚群傾向於分散在一個區域,排斥力和吸重力的平衡決定著它們的密度和擴散程度。

圖|自組織的動態圓的形成(來源: Science Robotics )
3、動態旋轉運動。魚群最酷炫的技能,便是海洋中壯觀的「魚群風暴」了,它們經常利用這種方式來躲避捕食者的追殺,搞得捕食者暈頭轉向。
在這項研究中,研究人員利用了類似「銑削」結構的行為規則,該規則不依賴於對每個可見鄰居的單獨反應,而僅依賴於單個二進制資訊源,該資訊源指示至少一個其它機器人是否在視線內。
在這種情況下,機器人有一個設定,如果看不到任何其他任何鄰居,則稍微向右遊轉,如果看到任何機器人,則稍微向左轉,多圈下來,機器人自發聚集,組成了動態圓運動行為。
最後,研究人員在分散復雜性演示中,結合了多種行為以實作集體搜尋操作。
在魚類、機器人甚至人類集體中,掃描環境的工作可以在組成個體之間共享,從而可以減輕每個個體的負擔,同時實作更高的集體警覺性。
未來能用於水下搜尋
Blueswarm 的相關研究工作是在哈佛大學拉迪卡·納格帕(Radhika Nagpal)實驗室進行的。納格帕目前擔任哈佛大學 SEAS的Fred Kavli 電腦科學教授,以及衛斯生物啟發工程研究所副教授,她領導著自組織系統研究小組,探索受生物啟發的機器人技術和生物多代理系統的科研工作。
早在 2014 年,她的實驗室就曾經建立過一個由 1024 個微型機器人組成的陣列 Kilobots。當時 Kilobots 的設計靈感來自於白蟻蟻群,這些數以千計的分布式機器人,內建紅外發射器和接收器,允許個體與一些鄰居進行通訊並測量它們的接近性,最終完成指定形態的排列組合。
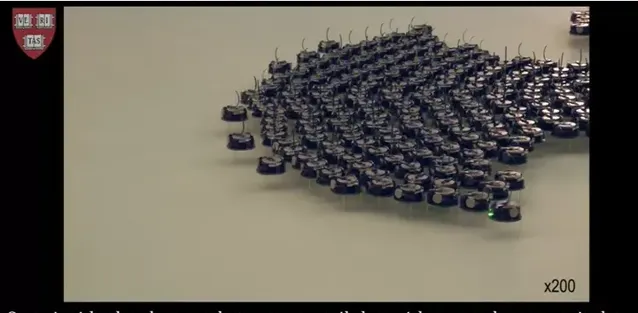
圖| Kilobots 機器人(來源:哈佛大學)
對於此次機器魚的研究成果,納格帕表示:「Blueswarm 代表了水下機器人 3D 自組織集體行為研究的重要裏程碑。這項實驗的相關成果將幫助我們在未來開發微型水下群體機器人,它們可以在水下進行環境監測和搜尋。該研究還透過綜合再現它們的行為,為更好地了解魚群鋪平了道路。」
據論文描述,在所有演示的行為中,Bluebots 僅依靠本地視覺資訊,這些資訊即時獲取和處理,這些協調技術對不完善的知識具有魯棒性,並且能夠從看似簡單的互動中,延伸出復雜而動態的全域行為。
當然, 論文在總結中也提到了一些局限性,比如使用低成本的鰭式執行器的運動效果並不理想 ,另外,如果在渾濁的水域等視覺較差的環境下,可能需要組合其他傳感器套件等。
關於這項水下機器人成果的展望,研究人員表示,也將有助於實作機器人的無監督技能前進演化,從而有可能結合多種機器人模式(空中、地面、水面和水下),來實作可延伸且強大的冒險活動。
未來,這些機器人可以集體出動,去搜尋失事飛機的殘骸,落難船只和落水人員,以及套用到諸如環境監測、在珊瑚礁和沿海水域的搜尋任務等。
參考資料:
https:// robotics.sciencemag.org /content/6/50/eabd8668
https:// techxplore.com/news/202 1-01-fish-inspired-robots-movements.html
https:// phys.org/news/2014-08-a utonomous-robots-self-organizing-thousand-robot-swarm.html










