過去的一年裏,人形機器人(Humanoid Robot)賽道出現了爆發性的增長。其中,既有用兩條腿行走的雙足人形機器人,如波士頓動力 Atlas、逐際動力P1、優必選Walker S、傅利葉GR-1等;也有采用輪式底盤的輪式人形機器人,如星塵智慧 S1、銀河通用蓋博特(Galbot)、大象機器人水星X1等。
雙足還是輪式?人形機器人外形之爭到底在爭什麽?
雙足與輪式,成本差異與落地可能
人形機器人的靈巧手一般都參照人類手掌的五指造型(也有采取夾爪構型的);機械臂,也會參考人類手臂的關節與自由度;但人形機器人的下盤,到底采取何種形式?是雙足還是輪式?行業卻有著很持續很久的爭論。
在成本上,雙足是輪式底盤的多倍。
在移動速度上,雙足的速度普遍較慢。宇樹科技的p人形機器人移動速度為每秒3.3公尺,已經是雙足全尺寸電驅動人形機器人的巔峰水平了。但轉化為時速,也就是11.88km/h的時速,而輪式機器人一般都能夠達到30km/h。
在續航上,目前人形機器人續航能力多在1.5小時-5小時區間。比如優必選Walker X顯示其可續航時間是2小時,Figure01續航時間則是5小時。而輪式機器人的續航能力與移動速度都遠超雙足人形機器人,一般都大於5小時。
在運維上,雙足人形機器人目前在生產線上普遍還需要人類輔助, 目前還無法實作工作效率上對工人1比1(一個人形機器人同一時間內工作效率能等於一位工人)的替代 。加上目前不少人形機器人還需要「拴著繩子」行走,為了保障機器人在行走過程中的安全需要投入額外的人力與物力,運維成本較高。而輪式機器人,由於穩定性問題得到解決,運維上至少不必像雙足人形機器人那樣投入過多資源。
從構型上,輪式當然比雙足更加簡單。
輪式機器人不涉及重心轉移,只需要做一個行動平台即可。而雙足機器人的行走是一個不斷打破身體平衡的過程,人類可以依靠小腦輕松行走,但對雙足人形機器人來說,需要不斷調整姿態、進行關節控制,行走越快平衡也越難,一旦跌倒就容易引發任務終止或機器損壞。
在場景上,如果工作於工廠、倉庫等開闊平坦且結構化的環境,輪式機器人效率遠超雙足機器人。但一遇到台階或需側身行走的狹窄角落等復雜環境,雙足機器人則比輪式機器人靈活。
其實,在爭議之外,還有部份研究者,在研究輪腿結合的機器人(Wheel-Legged Biped Robots),試圖融合輪式運動的高速度、高效率和腿式運動的越障效能。
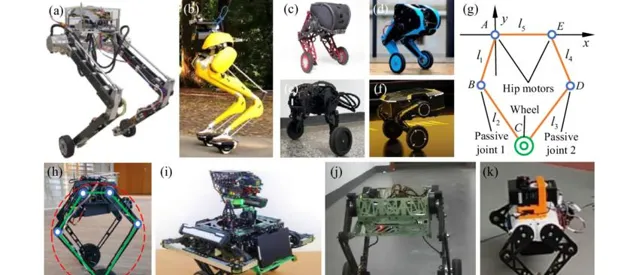
松靈在2024年初就釋出了一款輪足機器人T-REX,能跑、能跳、能越障,而且目前能夠實作在不同地形中⾃適應調節⾼度特性,包括平地、草地、單腿爬坡等,最高時速達到30km/h,搭配21.6v 5Ah鋰電池時能保證機器人擁有60-90min的續航能力,並支持重力勢能回收能量,支持電池快拆替換。
 但這也帶來結構上更大的復雜性,就如同混動車比純電車和純燃油車更加復雜一樣。
但這也帶來結構上更大的復雜性,就如同混動車比純電車和純燃油車更加復雜一樣。
輪式或雙足一般只需要各自的一套動作控制系統,但輪腿結合機器人,卻需要兩輪動平衡控制、腿部仿生跳躍控制和輪腿一體化全身控制至少三套控制系統,更加復雜。
當然,還有一種可能,就是將雙足機器人設計在一個單獨的移動底盤上,在平地使用底盤,遇到障礙時則「下車」使用雙足。
此外,一些場景對跨房間移動不看重的,也可以使用滑軌等固定。谷歌旗下「深層思維」公司就開發出一款桌球機器人,可在比賽中達到人類業余桌球選手的水平。研發團隊在預印本網站arXiv上發文介紹,這是第一個在桌球比賽中達到人類業余選手水平的學習型機器人智慧體,其主體為一個六軸機械臂,可透過底部滑軌前後左右移動。
但僅能在滑軌上移動,人們更容易將其當做是一個普通物品而非完整的人形機器人。也就是說,人形機器人,不管其底座是基於什麽構型,在普通人眼裏,還是得有下半身。
還有公司在雙足和輪式上雙面押註。在2024年WRC世界機器人大會上,人形機器人公司UniX AI(優理奇)直接釋出了兩款產品——雙足人形機器人Martian和輪式人形機器人Wanda。
南韓機器人公司Rainbow Robotics也釋出了RB- Y1輪式機器人,RB-Y1 上的雙臂都配備了七個自由度,並由一個具有六個軸的單一軀幹組成,可以移動身體。該公司聲稱機器人可以快速加速,並透過將身體傾斜到轉彎處以更高的速度轉彎。為了避免在運動時翻倒,還可以透過動態改變高度來安全地控制重心。
人形機器人采用怎樣的外形,還是要落地到具體場景中。如果機器人的活動場景中,沒有台階、高低不平等影響輪式機器人行進的障礙,那似乎也沒有必要采用成本更高的雙足設計。
如果僅僅從成本的角度,似乎輪式機器人已經勝利了?
特定場景下,雙足依然不可或缺
輪式成本低、更易於在行業早期實作降本、助力更多落地的優點,但特定場景下,雙足人形機器人則是必選項。
比如,在老齡化時代,老年人看護已經是剛需。在2024世界人工智慧大會上,智孝工業釋出的養老護理機器人「光華一號」亮相,主要功能就是把老人從床上扶起來、攙扶老人到廁所,采用了雙足設計。
有些場景下,輪式機器人會因為場景限制而無法作業。比如,在汽車生產線進入車內安裝零部件、檢查車內細節時,輪式機器人的體積和移動方式往往顯得笨拙,難以在狹小的空間中靈活操作。
人形機器人,是為了替代人類做的事,而不是為了替代人。億歐認為,隨著商業化落地的不斷推進,人形機器人和工業機器人的邊界甚至會越來越模糊——能夠以更低成本、更高效率完成既定工作任務才是機器人的最優解。
比如礦區、能源部門的管路安裝機器人、電纜卷放機器人、巷道修復機器人,這些都不具備人形,但在各自的場景中也非常適配。
如果進廠打螺絲,並不是人形機器人最合適的場景——畢竟,工業機械臂的成本更低。
那麽,更適合人形機器人的場景在哪裏呢?
或許還是在家庭場景。
星塵智慧創始人來傑告訴億歐,人形機器人進入普及化的價格臨界點,就是具備足夠全能操作性的基礎上,價格降低到一輛普通小汽車的時候。
對於目前采用輪式構型,來傑也向億歐表示,星塵智慧也具備雙足機器人技術,但目前雙足的成本還是太高,對商業推廣上不利。但未來,隨著技術發展和成本的降低,不排除使用雙足的可能。
銀河通用創始人王鶴也認為,雙腿現階段不是最優解,徒增成本。同等身高下,兩條腿的 BOM(原材料成本)比一個輪式底盤貴十倍。雙手在場景落地上更有價值,而大量場景其實不需要雙足運動能力,比如巡檢、巡邏,機器狗和車一樣能做。
王鶴在晚點的專訪中指出,雙足只解決了通行問題,沒有操作能力。但雙手能做傳統機器人做不了的柔性生產,它們多是人力密集型產業裏的糙活,比較容易泛化,想象空間和場景非常多,所以上半身的重要性高於下半身。當然,如果雙足的成本足夠低之後,「我們也會換上腿」。
雙足帶來的難題是很多的, 比如人類輕松做到的連續跳躍,對於雙足人形機器人來說就是很難的事情,早期的雙足機器人都是步履蹣跚 。
為了解決這個問題,北京通用人工智慧研究院還聯合樂聚(深圳)機器人技術有限公司釋出人形機器人硬體系統,該系統基於質心動力學構建基於模型預測控制的最佳化框架,試圖解決人形機器人連續跳躍的難題。據了解,該演算法已經部署於樂聚的「誇父」高動態人形機器人上,展示了連續跳躍的魯棒性。
不僅連續跳躍,甚至彎腰撿東西對雙足人形機器人都是挑戰。
而輪式機器人的連續移動,則是一件非常簡單的事情。
總之,輪式人形機器人在移動速度、能耗、負載能力等方面更具優勢,適用於規整、平坦的環境及任務重復性高的場景;而雙足人形機器人在地形適應力、靈活性、互動體驗等方面更占優勢,適合不規則、復雜的環境以及需要高度靈活性和互動性的套用。
按照馬斯克所說的第一性原理,找到每個系統中存在的那個最基本的命題,只要不違背它,那麽任何改變都可以接受。那麽, 將第一性原理套用於人形機器人賽道,也意味著,雙臂雙手要比雙腿雙足更重要。
在SanctuaryAI聯合創始人兼CEO喬迪·羅斯看來,腿是人形機器人用手實作任務達成的移動工具,手才是人形機器人優先突破的方向。喬迪·羅斯就指出,人類工作有98%是用手指精細完成的。
從人形機器人最本質、第一性原理角度,做好雙手才是根本。 但,雙足也並沒有被拋棄。 幾乎所有做輪式機器人的企業,都沒有排斥未來采用雙足構型。而一旦雙足技術達到臨界點——那麽在家庭場景中,雙足大機率會成為主流。
因為家庭場景不同於工業場景,沒有大面積的平坦廠房,非標化問題突出,還會面臨狹窄的通道,老式樓房的上下樓,這些都需要雙足機器人來實作順利的移動。
很多網友已經暢想了在家裏使用人形機器人可以做的事情:和面揉面蒸饅頭,做西紅柿炒雞蛋,用電水壺燒水,水池裏刷碗並把碗放好,掃地收垃圾,從洗衣機拿衣服去陽台曬好,刷鞋,把門口亂放的鞋放在鞋架上,給貓砂盆鏟屎並收好垃圾,按摩等等,
而輪式人形機器人,則大機率會進入商業、工業場景,發揮在平坦地面快速移動的優點,並在雙臂雙手上開發出適配工商業場景的更多功能。
億歐認為:短期來看,3-5年內,輪式依然是人形機器人商業落地的主要形式。長期看,隨著雙足結構的成本下降,以及可快速換電緩解續航問題,雙足人形機器人的市場規模預計可以與輪式相頡頏。
從中長期看,混合解決方案將會成為各家接下來發力的重點。據億歐了解,目前的多家輪式人形機器人也同時在投入對雙足的前期研發,而雙足機器人更改構型,研發一個移動式底盤也並非難事。 我們預測,未來會有更多人形機器人企業同時推出雙足與輪式的構型,在特定場景下提供更具針對性的解決方案。











