在一定碰撞烈度的限定內,我們如果談論被動安全的話,帶大梁的越野車是最安全的,就下圖這個玩意兒,側碰比普通車要好,正面碰撞不一定,但姿態更高,小車對撞的話,最硬的地方容易被大梁避開,造成極限1換1的時候,越野車極為占優勢的結果。

當然我們知道公路上的安去問題絕不僅有一個正面1換1,多數的慘烈的安全事故都是因為操控性出了問題才導致的,尤其是山路,每年滾下去的車也不少,所以操控安全感的概念就被提出來了。

方向盤背後的轉向柱,引發扭桿彈簧變形,產生助力推動齒條位移,牽引轉向拉桿拉動轉向節,引發輪胎產生側偏力,這些動作做完之後,車身才會產生質心轉移和側向力,進而透過側向加速度反饋到人的大腦中。
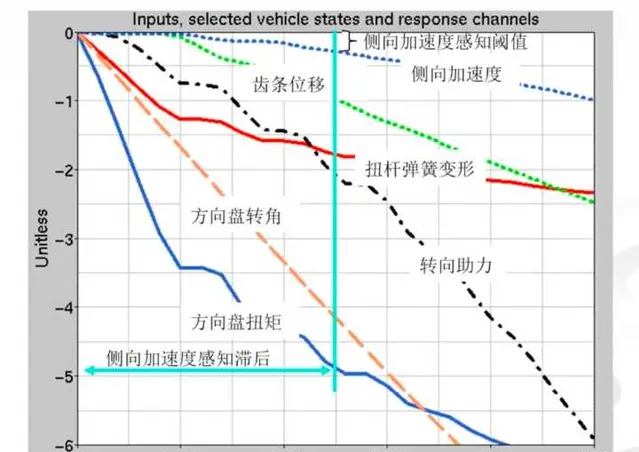
所以駕駛員開始有側向加速感的時候,意味著轉向系統早就做出動作了。轉向意圖和產生感受之間的這個滯後值,不同速度下需要有一個合理的變化,而且這個變化越線性,車子越好開。那麽衡量和調整這些參數,就是一門學問了。
學術上定義一個叫轉向靈敏度的東西,就是車輛側向加速度對方向盤輸入角的導數。剛才我說了,轉向系統有個滯後,那麽如果把側向加速度和方向盤轉角進行座標系展開,就是這條曲線。
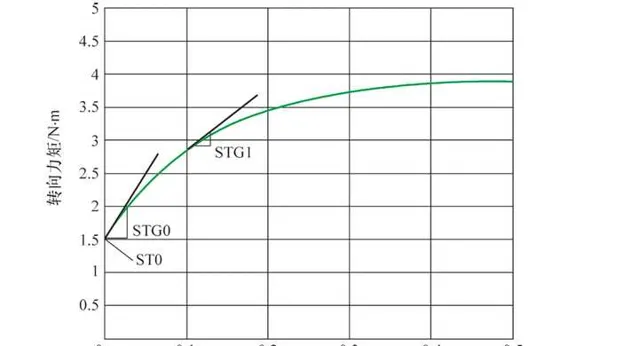
這張圖非常有名,教科書裏都有,根據公式來看,轉向靈敏度就是這條曲線的斜率,最小轉向靈敏度就是中間這一塊,這塊區域啥意思?
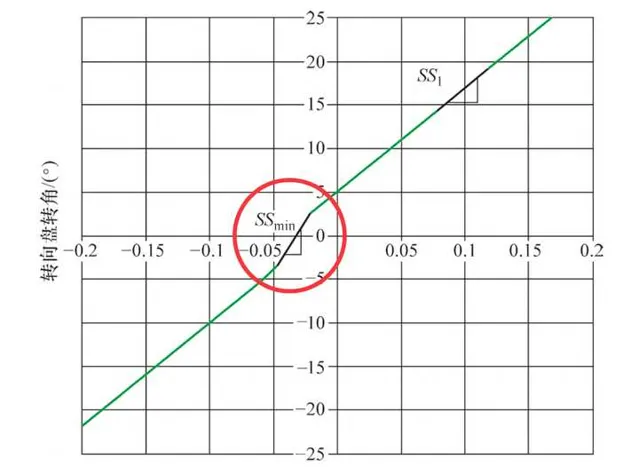
相當於,你方向盤在這個區域內打多少度,車輛轉向是沒有明顯動作,這跟你用讀數顯微鏡測量時,你的手柄螺絲回轉產生的空程差類似,測量中強調避免這種誤差,汽車工程反而強調的是利用它,怎麽利用呢?
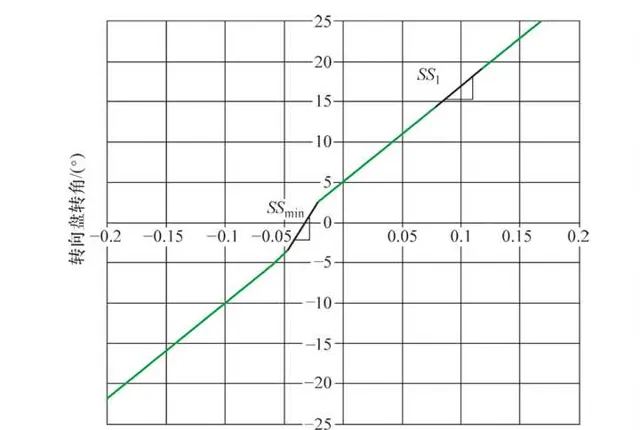
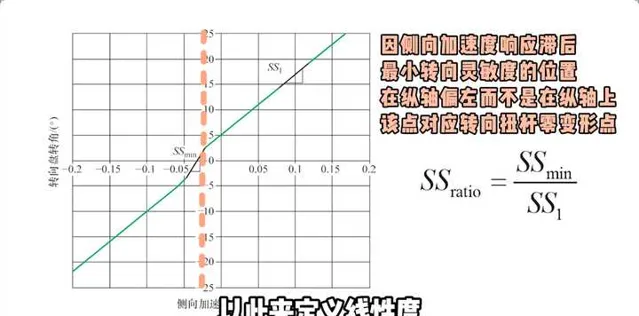
剛才我們講過,所有的車,方向盤你稍微擰一點,你是感受不到側向加速度變化的的,因為它低於人的最低感知閾值,俗稱方向盤死區,這個區域內不代表車輛沒加速度,為了更加細致地量化,工程師又有個新定義,就是死區內外不同的靈敏度,也就是這兩段曲線他們各自的斜率做一個比值,以此來定義線性度,這個比值越接近1,車輛靈敏度的線性度越好,註意,是叫做轉向靈敏度的線性度。
很多人不理解,
轉譯成白話就是一輛車,不是不靈敏,而是轉向發賊,我記得早期的2013款Model S轉向就是這毛病,但後續型號修正了。
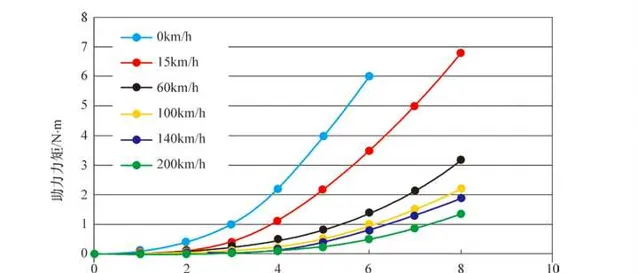
當然,說到這,就不得不提到駕駛員感受最多的東西,就是方向盤手力,手力這東西牽扯很廣,包括但不限於你用多大勁去擰方向盤,以及方向盤給你多大勁來反饋你進一步的動作,這些細微的感知在評價車輛時極其重要!現在很多人的認知都是反的,只知道有助力,不知道有手力,實際上手力和助力互相作用才是作用到車輛轉向和懸架上的力。現如今幾乎所有車輛都安裝了手力隨速度可調的轉向系統。
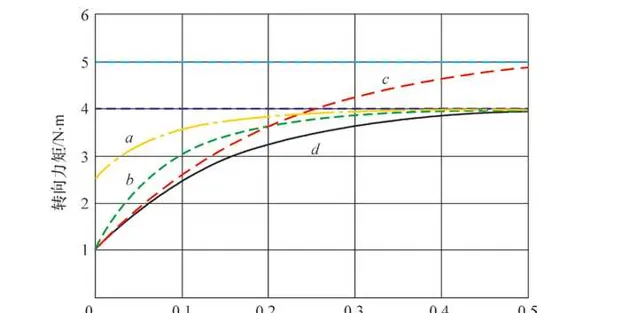
如果車輛行駛方向發生變化,駕駛員手力自然有反饋,一輛車變道或轉向時,隨著方向盤轉角增加,側向加速度逐漸被你感知到,此時你希望方向盤的力矩要起到提升安全感的作用,你想一下,如果過彎或者變道時,隨著你側向加速度提升,方向盤給你感受到一種斷崖式下跌的感覺,那肯定會讓你心裏沒底,一緊張沒準就甩出去了,如果轉向力矩越來越大,到一定程度駕駛員可能會掰不動,保持轉向舵位的手力可能會變得越來越難以維持,這樣肯定也不夠舒適,所以很多時候,轉向力矩隨著側向加速度是逐漸增加但趨於飽和的這麽一個過程。表達在轉向力矩曲線上,就是隨著加速度逐漸增加,力矩也跟著增加,只不過增加的斜率是逐漸降低的,最後趨於平緩。
轉向力矩在工程上用梯度來定義,不過如果你不是車輛開發者的話就不用去用這個公式,你可以片面理解,這是車輛狀態變化反饋的一種合理鋪墊,之所以老王說這裏是片面理解,其原因就是轉向力矩曲線還不完全是反饋到駕駛員這裏的手力,他們之間隨著不同速度和需求是有一個推導關系的,簡單來說,轉向力矩和靈敏度曲線是根基,轉向助力系統的阻尼的反饋控制是錦上添花。
那麽說到這,就不得不說隨著時代不斷進步,轉向系統品種變得多樣化起來了。比如在液壓時代,這條曲線只與系統壓力有關,我們很難多樣化調整助力和轉向手感。那麽現如今發展到EPS轉向,是系統與機械束縛逐漸脫開的這麽一個過程,甚至可以根據不同車速和駕駛模式給出不同的轉向力矩曲線。
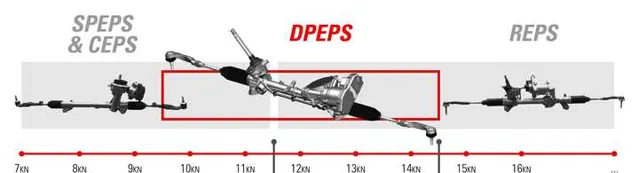
EPS還有不同細分型別,比如管柱助力C-EPS無論做的多好,對一輛車操控的貢獻都不大,因為轉向柱剛度會幹擾靈敏度,唯一的好處是便宜。小齒輪助力式比轉向柱助力好的地方在於電機的調節範圍和能力更大,但這兩種一般來講都是沒有頂級的齒條助力式R-EPS好,比如Model 3再被人噴,他也是R-EPS的,還有就是奧迪A7L賣的再差,它也是頂級轉向,之前老王還拆過一些車的R-EPS,它電機和滾珠絲杠是透過皮帶傳導的,皮帶兩端不同半徑的齒輪為一級減速,滾珠螺母是二級減速,除了這種形式,還有一種REPS是電機直接裝在轉向齒條上的,這兩種都是目前比較好的轉向系。

| 名稱 | 英文 | 縮寫 |
| 管柱式電子助力 | Column drive-EPS | C-EPS |
| 小齒輪式電子助力 | Pinion drive-EPS | P-EPS |
| 雙小齒輪電子助力 | Dual Pinion drive-EPS | DP-EPS |
| 齒條平行式電子助力 | Parallel Axis EPS | PA- EPS |
| 齒條同軸式電子助力 | Rack-Direct EPS | RD- PES |
*
總結的不一定全面,下方隨時補充
咱們汽車圈常用的諺語,叫做零部件體現整車下限,最終調校體現一輛車的上限。但在懸架和轉向領域更多的是反過來看,零部件格局沒到,調校再多也達不到想要的效果。理論測算再精密,也逃脫不了零部件格局受限。
另外有個技術名詞這裏可以記一下,叫做轉向中心感On center feel。之前在皓影PHEV講解中給大家分享過,簡單來說你可以理解為一輛具有良好中心感的車,需要具備方向盤輕微偏轉的回正能力,直線穩定性好的同時,中心感也要清晰,無響應區和超調量都要合理。

前面講了,一輛車變道行駛時,從無響應區過渡到車主能感受到側向加速度的過程要線性,轉向手力也要適中,手力與變道響應之間遞增關系比較好的車才叫好開。你可以試著在變道過程中,給車輛一個輕微加速或制軔,如果一輛車不需要太多方向盤修正就能夠維持原有的軌跡,出彎時方向盤還有不錯的回正能力,就可以視為好開的車。
總結
本期老王帶大家了解到了帶大梁的越野車的被動安全內容,除此之外,分享了一些關於評價車輛操縱性的客觀參數,比如什麽叫轉向靈敏度、靈敏度的線性度,什麽是力矩梯度和手力反饋,還有轉向中位感。
看完這些知識,很多人說了,我怎麽能活學活用呢?其實之所以很多人覺得前面比較難理解是因為,咱們都是正著評價,一輛車到底怎麽設計會更好,那如果需要在短時間評價一輛車,其實不妨利用逆向思維,把前面老王講的定義反過來看,比如說下面這三個現象,如果出現了,基本上就可以對車輛操控性進行一票否決了。
第一,如果一輛車需要頻繁較大振幅矯正方向盤才能維持變道這個過程,並且側傾來臨得很快,振幅又比較大,這說明橫擺和側傾響應有很大的超調量。這顯然不是好開的車,很多改懸架沒改好的越野車會出現類似情況。
第二,如果你發現方向盤的手力與轉向響應不協調,在緊急避障時,該透過大角度轉向時,速度起來了,但方向盤角速度跟不上,夠不成線性關系。說白了就是你想變道的時候,感覺車子拖後腿不能幫你遊刃有余地變道,這說明轉向助力沒有調好。
第三,如果轉向助力拉垮的同時,後軸還有明顯甩尾,讓駕駛員感覺車輛遲鈍、笨重和不安全,這可並不僅僅是轉向系出了問題,說明這輛車很可能是懸架都沒有調整好。











