杀马特歌姬来沈阳了,虎哥赶去沈阳站给几位送去好果汁,但他却不知道路该怎么走。
迎面走来一个重量级人物——刀哥,虎哥忙上前问路,得到的却是刀哥一句
两人呆滞的站在路边,初夏燥热的风儿吹过,尴尬是今天的沈阳大街。是的,虎哥迷路了。
人类历史上,迷路不仅仅意味着尴尬,可能还意味着遗憾、失败、受伤甚至死亡。从人们利用天上的星星确定方位开始,到现在漫天飞舞的导航卫星,为了不让自己迷路,人类甚至把自己变成了天上的星星。
但和站在沈阳大街上的刀哥不同,潜艇的工作环境更为恶劣。用于传输卫星信号的电磁波难以在水下传播,因此潜艇在水下难以利用卫星定位来确定自己的位置。而出于隐蔽等原因潜艇也无法经常上浮来确定自己的定位。正巧两人手机都坏了,和茫茫大洋中的潜艇一样,他们都没有办法利用卫星导航。哎呀这个虎哥就是逊啦,这个刀哥也是个five,聪明的小朋友快出出主意帮帮他们吧。

1.指路的艺术——惯性导航
二人在路上漫无目的的走着,终于在五月古筝钢琴私塾前碰到了一位儒雅随和的东洋友人,经过一番唇枪舌剑后,终于给虎哥勾画出一副去往沈阳站的王道征途。

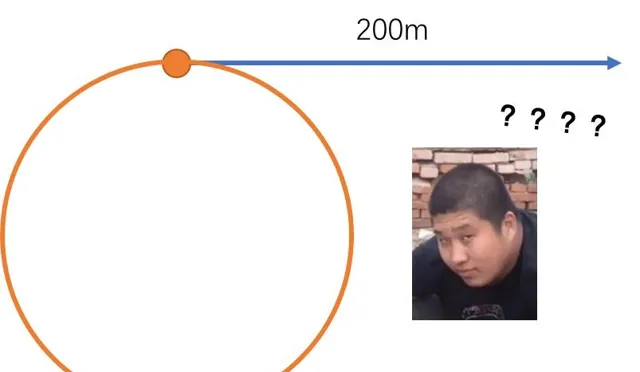
一般来说从一个已知点出发,只要知道自己过去所有走过的路径,就可以推断出自己目前所在的位置,如果目的地的位置也已经确定的话,那接下来去往目的地的路径也就有数了。如图所示,只要虎哥能够清楚地测量出他向东走了200米,又逆时针转向45°后走了100米,那他就可以知道再逆时针转向135°后走100米就可以到沈阳站了。潜艇在水下也可以通过类似的方式,从已知位置的港口出发,按照之前设计好的航线,将自己引向目的地。
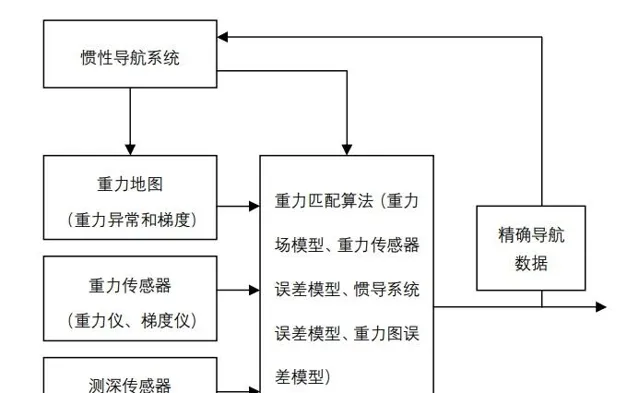
有些小朋友可能就会问了:「在海洋中如何才能知道自己走了多远呢?」是啊,在海洋中又没有卫星信号,也不可能带着尺子走一路量一路。为了解决这个问题,潜艇只能靠自己了,他们通常带着惯性导航系统,这套系统主要工作的部分可以不通过与外界交换信息来进行导航,因此属于自主导航。惯性导航系统由两个部分组成——加速计和陀螺仪,分别用来测量潜艇的加速度和姿态,经过一系列计算来确定潜艇走过的距离和朝向。

大家在坐车时有没有发现,当车辆在加速时,自己仿佛被按在了座位上,而当刹车时,自己又不受控制的向前倒,这是因为物体都有保持静止或匀速直线运动的属性,也叫惯性。在研究这个问题时,可以引入一个假想的惯性力,根据二年级将会学到的牛顿第二定律,就可以求出这个惯性力的加速度,这个加速度的数值等于潜艇的加速度。有了加速度的变化,我们就可以求出各个时间点的速度,知道了速度和行驶的时间,我们就能求出潜艇走过的路程了。当然,这里面需要用到四年级学的微积分知识,在这里就不详细说明了。

1852年法国的科学家傅科发现在高速旋转中的转子由于惯性作用其旋转轴永远指向一个固定方向,就像我们在玩陀螺时,不管怎么触碰,高速旋转的陀螺永远能够恢复到直立于地面的状态。根据这个特点,人们把高速旋转的圆盘放在多轴的架子上,从而可以判断潜艇的姿态。根据姿态并结合用加速计测量的加速度,我们就可以计算出潜艇旋转的角度了。
通过上述两个仪器的数据并经过计算,潜艇就可以知道自己走过的路径,并配合航海地图,就可以知道自己的位置了。但这种导航也会存在误差,在动辄数百海里的航程中误差会放的很大,生活中所说的「鬼打墙」就是没有修正误差所造成的后果。所以在使用过程中需要加入不同的参数来修正计算结果,并配合其他导航方式相互印证。
就这样,虎哥来到了沈阳站站前广场,但这时候他又犯了难了,该怎样才能在偌大的广场上找到杀马特团长呢?
2.「应该就是这了」——地球物理导航
而在熟悉的地方,人们很少会靠着地图和问路来为自己导航,我们长着一双眼睛,只要我们通过肉眼来捕捉到周围的特征,就可以知道自己在哪里,在平行世界中,杀马特团长曾利用这用方法找到了徒弟被偷袭的地方。在水下光没有办法传播,但地球依然不同的地方依然有着不同的特征,潜艇通过携带的传感器就能够定位了。
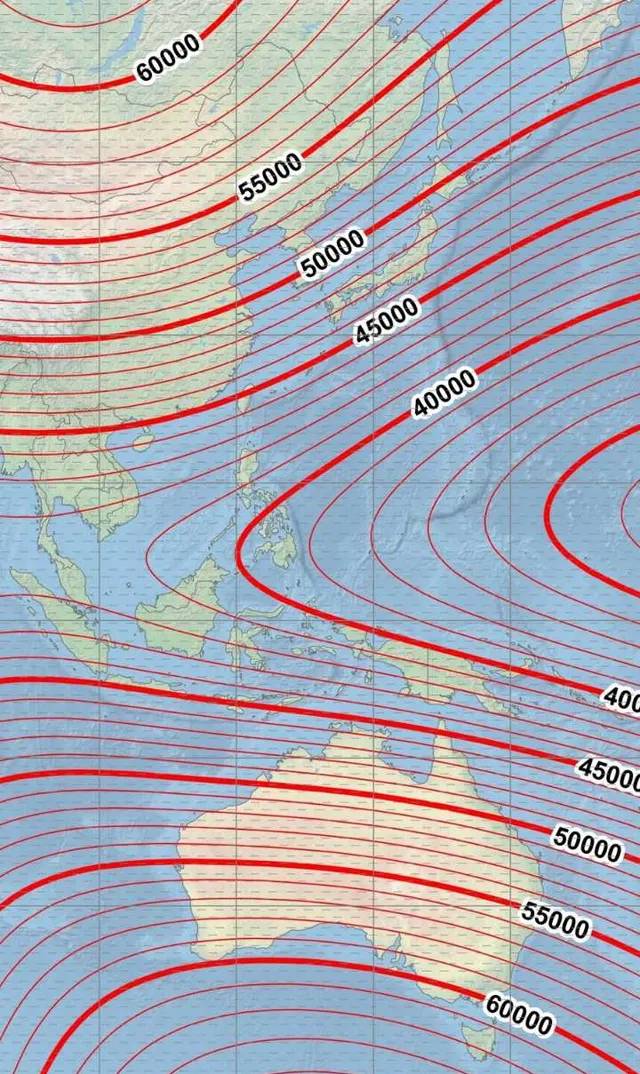
地球上存在着磁场,但这个磁场是随着纬度和周围环境变化而变化的,只要我们有相关海域的磁场变化数据,就可以用磁定位系统得到的当地磁场数据与之比对,从而确定潜艇所在的位置,这种导航称为地磁导航,同样的方法也应用于重力场导航中。还有一种方法是利用海底地形辅助导航,利用声呐得到海底地形的信息来确定自己所在的位置。这种方法精度比较高,但需要前期做大量的地球物理信息准备,当然在卫星系统发达的今天,用来做惯性导航的辅助还是比较方便的。
正好刚才杀马特团长在朋友圈里发了一张照片,虎哥对着照片上的特征,成功找到了杀马特团长,送出了自己珍藏已久的好果汁,可喜可贺。

3.「全体目光向我看齐嗷」——声学导航
送别杀马特歌姬们以后,虎哥想要和全世界分享他的喜悦,他高举双臂,高声叫道「全体目光向我看齐嗷。」在嘈杂的沈阳站,如果有足够多的人在发出有特点的声音,人们就可以用他来判断位置。

电磁波无法在水下长距离传播,但是声音可以。人们在海底固定的位置布设多个声学应答器,并将其以一定图形组成海底基阵,在这个基阵中的潜艇就可以测定到三个应答器的距离来确定自己的位置,这种方法被称为长基线声学定位。同时也可以反过来,在潜艇里装上三个接收器,只需要一个水下声学信标,从而确定潜艇位置。不同的配制各有千秋,一般潜艇会装上多种声学定位仪器来确保精度。

最终,见到杀马特歌姬并学习了潜艇怎么在水下导航的虎哥在广场上跳起了欢快的舞
那一脚,踢出了整个盛夏。
参考文献
[1] 导航历史渊源—— 导航专家杨晓东教授谈潜艇导航
[2] 邢国强,国外水下导航技术发展现状分析
[3] 卢道华,SINS-DVL水下组合导航技术发展综述
[4] 周保军,水下导航技术研究
更多不靠谱回答请看
狗题主仗势辱娇娘,弱女子苦练求反抗
绝绝绝暴力火箭帝国,叹叹叹尽付历史烟波
纵兵万千侯国取,前债何必本朝还
莫道国足道行浅,穿越回去也赢人
越百年老船新使命,看今朝劈浪斩碧波










