笔者7年前第一次体验无人驾驶汽车的时候,并不了解SAE自动驾驶分级是什么(SAE J3016首版发布自2014年),只是对现场工程师的那句提醒印象深刻:「不好意思,我们提醒大家请不要碰车内任何东西,这台工程样车要数千万。」这辆雪佛兰EN-V 2.0给我很大的惊喜与惊讶,惊喜的是我们未来可能再也不需要把时间都浪费在通勤上了,惊讶的是美国已经研发出不需要方向盘就能开的车,是否意味着中国这个刚能造点正经车的乘用车产业,要被降维打击一夜回到解放前?

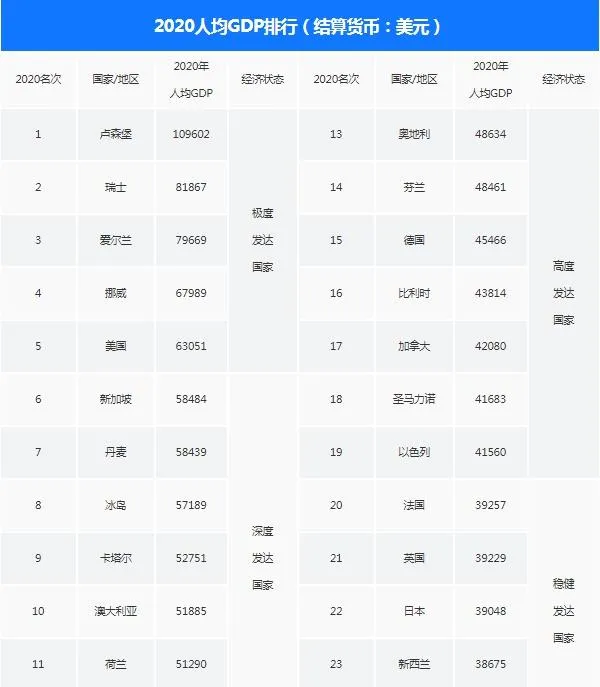
感谢这几年来中国GDP的稳健增速,我才有底气写后文提到的荡气回肠的内容。在智能化大势之下,我们的自主品牌汽车产业没死,正在奋力抗争,且势头并不差。我们为何要发展自动驾驶? 因为重工业是国际话语权。 很抱歉一开头就说这么沉重严肃的话题,但必须如此才能让文章思路更加清晰。中国是汽车工业的后来居上者,不过只是产销量连续11年称霸世界第一席位,技术与质量可还没能力封狼居胥。简单来说,中国是「汽车大国」而非「汽车强国」。笔者在国际货币基金组织官网找了一组新的2020年名义GDP数据,大家了解一下全球Top 10经济体当前的情况:

此前IMF预测中国在2020年的全球经济占比是17.77%,实际上中国一撸袖子加把劲干出了18.15%。我们再扫一遍上面列表中的10个国家,没有任何一个是能脱离汽车工业而繁荣的。我们不要小看印度,它可是全球第五大工业国,同时也是全球第五大汽车工业国;也不要觉得加拿大汽车工业没地位,那可是全球前十的汽车工业大国。再看下表的人均GDP,数据依然来自IMF。可以看到这四等发达国家里面,实际上有话语权的国家都是有强大汽车工业基础的,瑞典应该是唯一的例外。
想要说话掷地有声,你手头得有汽车工业。 因此,发展自动驾驶也是大国博弈的需要。 我们把时间线放长一点看,第一次和第二次工业革命重新划定了这个世界由谁剥削谁,结果分赃不均就打了两次世界大战(实际上是同一场),接下来是第三次工业革命,世界格局从热战变冷战,几十年后冷战落幕,现在大国之间只打经济战。美国、中国、欧盟,三者已成经济三极。中国GDP已经有美国72.8%了,并约等于没了大英之后的欧盟总体GDP。每一极都在汽车领域争夺话语权,美国有太空霸权、卫星定位、高精地图、自动驾驶、芯片技术等硬核优势,后起的中国有完整的制造业链路和崛起中的智能汽车产业氛围,欧盟哪哪都不弱就亏在不是统一政权。

汽车工业是最考验综合国力的产业,上下游数百个门类、数千家企业参与,才能造出一台车。大众集团2020年营收2714亿美元,德国全境GDP总量3.78万亿美元,大众集团占德国经济比重高达7.18%,「富可敌国」就是说的这种情况。所以,国与国之间的争斗,必然要涉及汽车领域。要打击他国汽车,欲加之罪何患无辞,丰田刹车门、现代油耗门、大众排放门,这些在美国市场发生的事件,就是外企不肯屈服于美国政府,直接被强权打压了。除了是大国博弈的棋子,自动驾驶技术的研发还能减轻驾驶负担(提升产品竞争力)、提升行车安全、通行效率、为社会创造高薪就业岗位,但这些都不是重点,国家之间的利益制衡才是。汽车工业之争的下一阶段就是电动化与智能化,而智能化的关键在自动驾驶,我们今天要聊的话题。L3是不是走进了死胡同?资本骗局or法律黑洞?笔者还记得2017年奥迪发布D5世代A8时的盛况,第一款量产SAE L3级自动驾驶系统基于第五代奥迪A8诞生了。虽然当初我已经预判过这套系统入华之后并不能使用,但并未预料到它在西方国家也没能自由跑起来。后来,江湖传言说是「花10亿欧元解决了L3」的奥迪自动驾驶项目组,被整合至统一的大众集团Car.Software车载软件开发部门,一个开启自动驾驶新时代的功勋项目组就这样消失在汽车历史中。别急,其实对于奥迪而言是明降暗升啊,因为Car.Software的总部因此从狼堡迁至英戈尔施塔特,奥迪成为了集团的智能化大脑中枢。
回到主题。以美国为首的自动驾驶行业当初定义自动驾驶等级的时候,并未发觉L3居然是一个非常尴尬的分级(下图是笔者画的,供形象理解),它的尴尬之处在于任由人类驾驶员「撒手不管」,但又要求人类驾驶员「必要时必须立刻回来接管」,无法形成逻辑闭环,有巨大的安全风险。
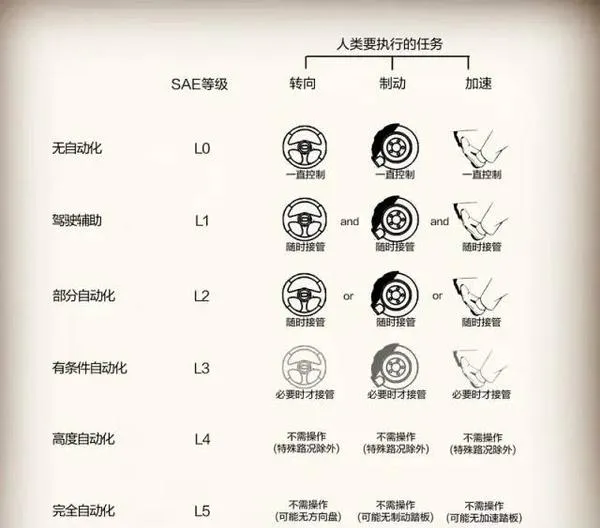
在这里,我们简单汇总下SAE规则下自动驾驶等级的异同: L1:解放脚 (基本是人类在开)L2:解放脚、手 (限定条件内人机混开,基本是人类在开)L3:解放脚、手、眼 (限定条件内人机混开,基本是系统在开)L4:解放脚、手、眼 (全区域由系统开,特殊情况除外)L5:解放脚、手、眼 (全区域/全时域由系统开)P.S. 2021年1月1日施行的【汽车驾驶自动化分级】国家标准也对自动驾驶进行了分级,整体规则与美国SAE标准保持一致。到了L3之后,就要完成自主代客泊车AVP(Automated Valet Parking)、交通拥堵引导TJP(Traffic Jam Pilot)、高速公路引导HWP(HighWay Pilot)这些主要的功能,可是L3有个最大的问题——L3的交通事故权责模糊不清。 简单来说,L0-L2是人类驾驶员全责,L4-L5是汽车智能系统全责, L3是一滩永远吵不清的糊涂账。因此,现在很多车企都在说自家的自动驾驶辅助系统是L2.5、L2.9、L2.99等等,无论什么话术,意思就是「没到L3」,所以车企暂时不需要负责。实现L4的难度有多高?因此,目前有不少部分达到L3功能但只能按照L2来使用的车型,比如四代奥迪A8、特斯拉FSD Bate版、蔚来ET7、智己L7、小鹏P5、极狐阿尔法S HI版等等。现在业界有可能直接跳过权责模糊不清的L3,直接把L4投放到市场上。目前已有车企决定这样子做了。像谷歌这种解决方案供应商则不同,他们不需要把研发成果绑定在现售车型上循序渐进迭代更新,没有包袱的他们选择了直奔L4。整车L4水平,需要在全场景下实现包括自主代客泊车AVP、交通拥堵引导TJP、高速公路引导HWP在内的所有功能,也就是车子自己能走能停完全不需要人类交涉。当然,L4是可以保留车辆操纵单元的,在特殊情况下可交给人类操纵,比如地震海啸造成车辆通讯的情况。先说AVP。之前我们聊过小鹏的自动泊车,而小鹏一直都是以此为豪的企业,泊车成功率不低。小鹏此前的方案是利用汽车传感器进行室内地图建模,这种在非市政道路收集地图数据的方式也避开了法律屏障,虽然看起来精度并不高,但也算是一个不错的开始。
今年6月4日,小鹏P7通过OTA更新的VPA停车场记忆泊车(Valet Parking Assist)。这里我们就要科普一个概念:AVP分为两个分支,一支叫H-AVP(云端自我学习泊车),经过SLAM系统训练之后完成地图建模了就能持续使用,也就是来一次以后就随时来,小鹏、奔驰、威马在整;而更高阶的P-AVP(云端高精地图泊车)只需驾驶员开到停车场门外就可以离开驾驶席,车子自己会按照高精地图的指引找车位泊入,暂时还没车企能量产。
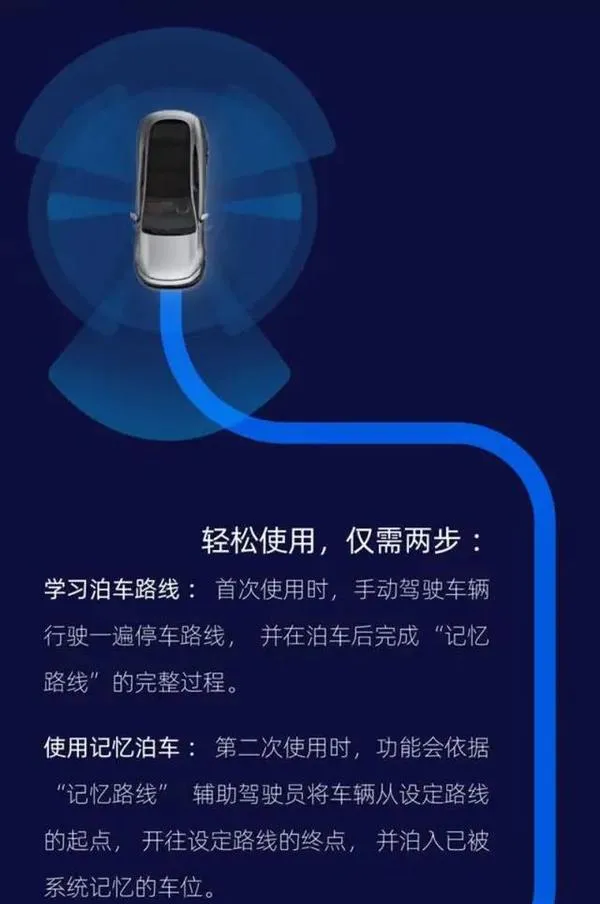
小鹏这次的更新是VPA停车场记忆泊车,功能实现上与W223世代奔驰S级和威马W6还是有所不同的。小鹏的VPA是自研完成的停车场记忆泊车功能,它的记忆线路可以达到1km,一台车可以学习100个停车场的泊位,不过单个停车场只记忆1个泊位,还不如少点车场但每个多点泊位比较实在,而且小鹏的VPA只支持泊车入库,不支持出库。还有一点笔者有点理解不了的是,小鹏VPA不支持跨层泊车、沿线出库、全程APP车外操作也就算了,为何仅支持地库泊位,在地面泊位用不了,W223和W6倒是没有这个限制。

从使用场景来看,威马目前开放的H-AVP能够在地面/地下停车场内任何地方都可以进行学习,不限起点位置,不限车场数量,单个车场可设定5条不同的入库/出库路线,可以跨层,驾驶者不用在车上,只需要通过手机一顿操作能完成车辆的泊入和泊出,对于那些过窄的、停好之后无法开门出来的停车场景来说很实用。除了目前已经开放的H-AVP,威马官方还透露将会在年内通过OTA将P-AVP推送给用户。

威马的AVP是与国内自动驾驶实力担当的百度Apollo平台联手深度研发的,有百度「王牌」做背书,以后的P-AVP还有百度高精地图加持。小鹏是没有参与进来的,威马则有百度高精度地图加持,所以实现P-AVP更容易一些。包括奔驰在内的海外品牌想进入中国做自动驾驶,以后应该得用中国高精地图才行,现在连特斯拉都被要求把服务器建在大陆境内了,可见高精度地图在自动驾驶中也扮演着十分重要的角色。此外,要玩P-AVP,还要等室内基站通信硬件整起来才行,这需要更多的基建设施配合。

接下来聊交通拥堵引导TJP和高速公路引导HWP。TJP和HWP的速域不同,再加上自动车道变换(ALC,Automotive Lane Change),就是全速域的「有限自动驾驶功能」。TJP的决策和执行是一大难题,标定不好的TJP策略就会出现起步与制动的动作太过生硬,快了体感难受,慢了被旁边车子加塞,一来一去就晕车了……HWP+ALC就是现在很多新势力在谈的「高速领航功能」,蔚来叫NOP,小鹏叫NGP、特斯拉叫NOA、日产叫ProPilot、通用叫SuperCruise,反正都是一个意思。目前这项技术进展很快,实际使用起来比较便捷,人类驾驶员介入的频率并不高,小鹏官方给出的NOP介入频率是0.66次/100km,实测接近1次/100km,也即是平均开100km才需要接管。不过,以上TJP和HWP暂时均不能达到L4级别,只能在特定条件下(合适的路况/天气)进行约等于L3级别的自动驾驶。

如今奥迪A8、蔚来ES6、特斯拉Model 3、小鹏P7、广汽埃安LX、长安UNI-T、日产天籁等等车型都可以执行TJP、HWP、ALC,但因为传感器配置并不甚完备、高精度地图与定位技术还没到位等原因,除了A8之外的车型都要求驾驶员随时随地立即接管车辆(L2-L3之间);A8则在限定条件下(特定的道路等级、光照、车流速度等)可由L3系统完全控制车辆,驾驶员同样需要随时接管;进化成L4之后,系统随意开,除非有极少的特殊情况才需要驾驶员介入,比如奔驰W223和威马W6的无人泊车。比如,下面的gif图展示的是L4自动/无人驾驶技术,是广州企业文远知行在这次广州疫情防控中,使用无人驾驶车送饭到疫情隔离区。(现场实拍gif获授权自汽车之家)
L5是没有ODD(Operational Design Domain,设计方案运作域)的,意思是无论任何的道路状况(车道线、道路附着系数、围栏等)、环境(能见度、天气等)、前方可行驶区域(收费站、施工等)等等,L5都是可以免除人类驾驶者介入的。

因为自动驾驶的研发初衷就是更加安全和便捷,L1和L2级自动驾驶辅助系统已经帮我们降低了一部分事故概率,L3目前是祸是福还不知道,因为无法形成严谨的逻辑闭环(人究竟还要不要全神贯注呢?),L4还没有整车完成L4自动/无人驾驶研发的量产案例,无所不能的L5还有很远才来。我们现在可以知道的是,L4的实现成本会非常高;我们暂时不能知道的是,整车实现L4的量产产品何时才能来临,这需要L4系统在泊车/行驶、城市/市郊、低速/高速、国内/国外、晴空万里/恶劣天气等等所有情况下都管用。关于伦理与法规的思考乌伯林根空难(Überlingen Disaster)在十多年前揭示了空中交通管制系统的处置失当将会引发何种等级的人类灾难。空管员Peter Nielsen的指挥不当与光学碰撞预警系统的检修固然是两大缘由,但促使俄罗斯Tu-154客机与德国757货机碰撞的另一个原因也不能被忽略:如果两个飞行机组都按照空中防撞系统(TCAS)的提示分别进行拉高与降低,事故将不会发生;但由于俄罗斯机组「以人类命令为先」的原则,按照Nielsen的错误指示而非TCAS的正确指示执行,最终酿成了72人死亡的灾难——最后一位是空管员Peter Nielsen,死于刺杀。

自动驾驶技术对于人类而言并非新鲜事物,我们已经坚信这项技术长达大半个世纪。若溯源的话,最早能追溯到上世纪10年代在美国诞生的第一台电动陀螺稳定装置(自动驾驶仪的雏形)。即使60年代的阿波罗飞船已经用上了数字化自动驾驶仪,半个世纪后的俄罗斯人依然坚信人类犯错的几率比人工智能要小得多——历史事实是,单单俄罗斯航空这一家公司,血手之上就有超过8200条人命,远远高于第二名法兰西航空的1783名。从Autopilot一词便可知晓,汽车工业所武装的「自动驾驶」,技术渊源依然是航空与航天产业。我们可以用「陆上交通比空中交通复杂千万倍」的理由去埋汰乘用车/商用车自动驾驶技术的「滞后」,却一直不肯相信「人工智能」一定比「人类驾驶」更加安全,即使99.9%以上的失事航班俄罗斯籍飞行员并未抱着伏特加瓶子睡着在岗位上。2005年,Google X实验室就已开启了谷歌无人汽车计划(Google Driverless Car Project),2009年开始上路测试,约有23辆车分9种模型在测试。测试项目分为自动驾驶和人为干预的手动驾驶,行驶里程超过320万公里,至2017年只造成18次事故,其中绝大多数都是被追尾(测试车极速才40km/h),无重大人员伤亡,这是第一次AI判断出错——320万公里1次车体剐蹭轻伤,不知哪位人类驾驶员敢上前迈一步接受AI的挑战?只是,即使自动驾驶技术已经如此先进,我们还是无法把命交给AI。将AI变成Siri可以,变成小孩子的聊天机器人可以,变成咖啡厅上点心的服务员可以,但要让我们把交通工具的控制权完全交出给AI,连方向盘、油门、制动都摘掉,恐怕多数驾驶者暂时还不能被接受。目前,汽车工业大国们对AI造成交通事故的法律定义都是模糊的,这是一个谁都可以碰、谁都不敢碰的灰色地带。你可以研发自动驾驶汽车,甚至美国/德国某些州的政府还让你「合法」上路,但这并不代表合法解决事故纠纷。传统的汽车厂商都是很保守的,一个自动驾驶项目动辄数十亿美元的成本,很有可能就会被一两个死亡时间毁掉,而自动驾驶是不可能让死伤几率等于0%的——虽然自动驾驶已经被认定为「比人类驾驶安全非常多」。

因为当事故主体是「人」的时候,我们可以通过制约人的社会契约来解决纠纷,法律、法规、习俗、惯例甚至情面;但当事故主体是一台会思考的「汽车」时,适用于人类的社会契约就失效了,我们可以用金钱惩罚来制裁电子程序和自动驾驶汽车的制造商,但无法用牢狱去惩罚一套电子程序。带着未解的疑问,我们结束今天的议题。
(图/文/摄:太平洋汽车网黄恒乐)











