论文: A Unified Query-based Paradigm for Point Cloud Understanding
开源 :soon
摘要: 三维点云感知是自动驾驶和机器人技术的重要组成部分。论文提出了一种新的Embedding-Querying paradigm(EQParadigm)用于3d点云检测、分割和分类。EQParadigm是一种统一的样式,可以将任何现有的3D backbnone与不同的任务头结合起来。在EQParadigm下,输入首先在embedding阶段,采使用voxel-baes或者point base提取特征并进行编码,
然后,querying阶段使编码的特征适用于不同的任务头。这是通过在querying阶段引入中间表示(即Q表示)来实现的,论文中Q表示是一种神经网络,作为embedding阶段和多head之间的桥梁。。大量实验结果表明,EQParadigm与Q-Net相结合进一步提高不同任务的鲁棒性。
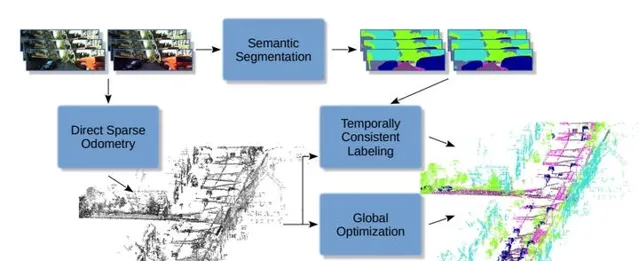
论文: Vision-based Large-scale 3D Semantic Mapping for Autonomous Driving Applications
开源: 无
在论文中,提出了一个完全基于立体相机系统的 3D 语义分割pipline。pipline包括一个稀疏视觉里程计前端以及一个用于全局优化的后端,包括 GNSS 集成和语义 3D 点云标记。提出了一种简单但有效的时间投票方案,可以提高 3D 点标签的质量和一致性。评估是在 KITTI-360 数据集上进行的。结果显示了方案的有效性.