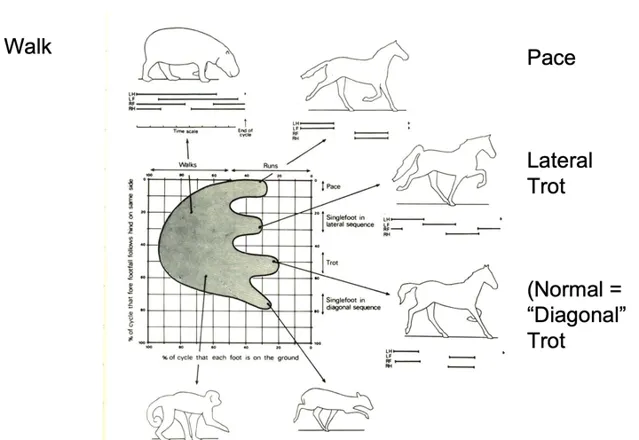
在進入正文前,得介紹一些走路的知識。
人走路的時候,先擡起腳,同時臀部位置上升,動能儲存為勢能,達到最高點的時候, 勢能(PE) 最大;當放下腳的時候, 全部的勢能轉化為動能(KE) ,推動另一只腳向前,如此反復下去,就達到了能量轉換的迴圈。
這就類似於一種鐘擺的機械能交換。理想情況下,如果 PE 和 KE 的漲落正好相反,並且振幅相同,那麽系統的外部機械能總量保持不變,不需要任何能量輸入來維持運動。

在現實中,不可能回收所有的機械能,總會失真失。如果一種動物能夠回收越多的機械能,那麽它對能量的利用效率就越高,越節能。

不同的動物有不同的體態、不同的行走方式,這就導致了有的動物走路費力,有的走路省力。
2004年的研究中發現,狗在走路的時候可以恢復70%的機械能 [1] 。
那貓呢?
Daniel Schmitt 做了一個實驗 [2] ,找來了6只貓,讓它們在一個6米長的跑道上自由行走,跑到上安裝了測力板。同時,會在貓咪的肩、肘、腕 、髖、膝、踝和跖趾關節處做標記,拍攝貓咪在運動時關節的位置變化。收集數據後計算貓走路的勢能和動能的變化。
 貓步實驗
https://www.zhihu.com/video/1510234606586126336
貓步實驗
https://www.zhihu.com/video/1510234606586126336
直接說結果,這些貓走路的時候,腳步間隔均勻穩定,平均可以恢復17%的能量,最大只有37.9%,遠遠低於狗的70%。
也就說,貓咪的走路方式是非常不省力的,這就是走路悄咪咪的代價。 在論文裏,貓步也被稱為隱身步態。
貓走路省力和它步幅有一定關系。貓在悄咪咪走路的時候,會采取更多的蹲伏姿勢,重心靠近地面,步幅更大。貓的步幅角度在25%左右,而之前的研究中,狗的只有15%。
研究觀察到,步幅角度越大,能量回收效率越低。下圖是能量回收效率和步幅角度的關系:
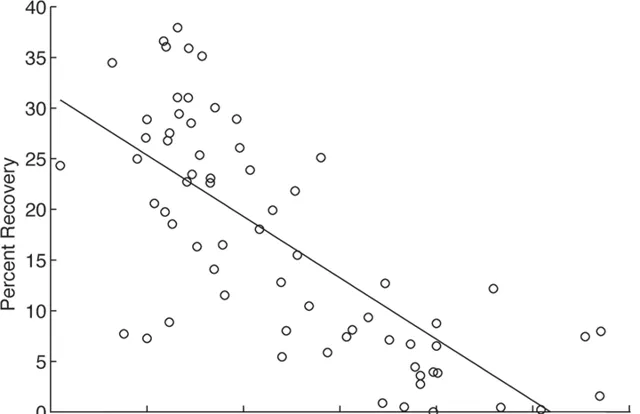
相對於貓來說,狗跑的距離更遠,在長途行走中需要節省能量;貓更傾向於跟蹤獵物,安靜才是關鍵,所以放棄了能量效率。

另一個研究也可以從側面說明一貓走路確實更費力。
2014年,科學家找了24只貓和24只狗,測試它們的前肢和後肢對地面的作用力。貓在向前推進的時候,對地面的垂直方向的力大約為3.89 n/kg,狗只有3.03 n/kg [3] 。
可以推測, 不只是貓咪,所有的貓科動物都會犧牲能量效率,來獲得更隱身的步態,提高捕獲動物的概率。
不夠安靜的話只能和下面這位一樣了。

這只貓走路更可愛(因為貓貓和馬在一起生活,所以走路有馬的姿態……
 像穿著盛裝走路的貓貓
https://www.zhihu.com/video/1510253842487128064
像穿著盛裝走路的貓貓
https://www.zhihu.com/video/1510253842487128064
參考
- ^ Griffin TM, Main RP, Farley CT (2004) Biomechanics of quadrupedal walking: how do four-legged animals achieve inverted pendulum-like movements? Journal of Experimental Biology 207: 3545–3558.
- ^https://journals.plos.org/plosone/article?id=10.1371/journal.pone.0003808
- ^https://www.sciencedirect.com/science/article/abs/pii/S1090023314002810











