近日,有外媒報道稱,特斯拉FSD(Full-Self Driving,全自動駕駛系統)入華或遇阻。由於對特斯拉軟件在美國引發的事故以及數據安全問題的擔憂,中國審批部門目前尚未批準特斯拉的最新自動駕駛技術。
對於上述傳聞以及特斯拉FSD的入華時間節點,特斯拉中國方面向中國新聞周刊回應:「沒有相關資訊。」
今年4月,特斯拉CEO馬斯克曾「閃電式訪華」,意在推動特斯拉FSD系統在華落地。在第二季度財報電話會議上,馬斯克也對外表示,特斯拉有望在今年年底前在其他市場獲得FSD的特許,例如歐洲和中國。
「特斯拉FSD是變革性的技術,對行業是極大的鼓舞。」在近日舉辦的第四屆沈陽智能網聯汽車大會上,中國工程院院士李克強肯定了特斯拉FSD。不過李克強也表示,特斯拉FSD實際仍是高階的輔助駕駛,是「影子模式」+「端到端大模型」。大模型真正意義上所需要的完備性的數據底座,車路雲一體化具有天然的優勢。「新一代FSD和車路雲一體化是不矛盾的」,李克強說。
2019年,特斯拉在中國實作本土化生產,成為刺激國內新能源汽車發展的鮎魚。如今,特斯拉FSD入華箭在弦上,或再一次成為刺激國內智能駕駛領域發展的鮎魚。
狼來了?機遇與挑戰並存
早在2016年,馬斯克曾設想過特斯拉車主的美好未來:有事車自動駕駛送人,無事車出門接活賺錢。
八年過去了,馬斯克暢想的未來雖然還未真正到來,但智能駕駛帶給行業的想象空間在不斷發展壯大。

圖片來源:特斯拉
「智能駕駛,包括車路雲一體化的復雜系統,即將進入規模化套用階段。」據李克強介紹,今年前五個月,中國新車智能駕駛輔助系統裝車已超過50%,L3級的進入準商業化階段,包括L4級示範範圍正在擴大。
同濟大學汽車學院教授朱西產表示:「特斯拉的端到端、人工智能讓自動駕駛更加成為可能,端到端被特斯拉帶火了,國內的車企都在說端到端。」不過在朱西產看來,國內企業在數據量和AI訓練的算力方面與特斯拉還有不小差距。「小鵬汽車的AI算力在國內比較強大,但跟特斯拉比也差了幾十倍。」
對於特斯拉FSD即將進入中國市場,北汽藍谷董秘趙冀對中國新聞周刊表示:「該來的還是會來,這也將是對國內企業技術實力的又一次考驗。」今年上半年,武漢蘿蔔快跑吸引了大量關註,極狐也因此得到一定的關註度。而在今年6月工業和資訊化部釋出的公示中,極狐汽車獲得首批智能網聯汽車準入和上路通行試點名單。「目前,極狐在智能座艙和智駕領域,搭載了鴻蒙OS智能座艙和華為駕駛輔助系統,與強者聯合應對汽車產業智能化的轉型。」趙冀說。
東軟睿馳總裁兼CTO杜強告訴中國新聞周刊:「特斯拉FSD的進入,是鮎魚效應,對我們整個國內的自動駕駛有挑戰,也是一種激勵,更長遠來講,是對整個自動駕駛能力提升非常好的契機。」
「面對挑戰,各個車企有不同的技術路線,有的與特斯拉類似,構建純視覺的方案,朝著端到端方案去走,這條路線的挑戰在於如何構建這麽大規模的數據中心;有的車企則堅持高成本激光雷達去發力。」杜強特別提及車路雲一體化的中國方案,「特斯拉是以單車智能+雲端超大算力為基礎,車路雲一體化的方案更多去利用路端一些資訊、器材去補全,在路端相對有覆蓋的主要的城市、主要的主幹道高速路、快速路上能夠實作自動駕駛規模化場景套用。」
FSD與「車路雲一體化」並不對立
實作自動駕駛,一般認為有兩種技術路線,一種是FSD,另一種叫做「車路雲一體化」,但二者並不是完全對立的。
簡單來說,特斯拉FSD實作自動駕駛,是給車安裝上眼睛,把大腦安裝在車裏,讓AI透過眼睛看路,來學習開車。而車路雲一體化可以理解為,車端、路邊分別有訊號收發機器,然後共同傳到雲上,透過雲來指揮車輛和路口來進行自動駕駛。
李克強表示,FSD可以在多種道路上進入輔助駕駛模式,但由於場景有限,存在感知盲區與超視距感知局限,城市MPI(接管裏程)仍較短,實際是高階的輔助駕駛。
李克強認為,特斯拉FSD是「影子模式」+「端到端大模型」,是車雲協同的套用模式,並非傳統的單車智能。FSD決策同駕駛人決策不一致時,數據回傳雲端用於FSD訓練,透過最佳化訓練結果OTA部署於車端,從而使駕駛水平不斷接近人類水平。
在李克強看來,單一車企大模型訓練數據存在固有弊端。首先是數據體量有限,無法實作訓練數據的海量性;其次是數據種類不全,無法保證訓練數據的完備性。而車路雲一體化系統融合車輛自主上報和路側感知統一采集的數據獲取模式,覆蓋範圍更廣泛、交通場景更復雜、數據種類更完備,具有天然的優勢。
伴隨人工智能新一代資訊通訊技術加速汽車產業變革,中國率先提出「車路雲一體化」智能網聯汽車創新發展路徑,國家政府加速頂層設計與政策法規制定,各地城市測試示範蓬勃開展,產業各界凝聚發展路徑共識,為中國智能網聯汽車發展指明新的方向。
圖片來源:東軟睿馳
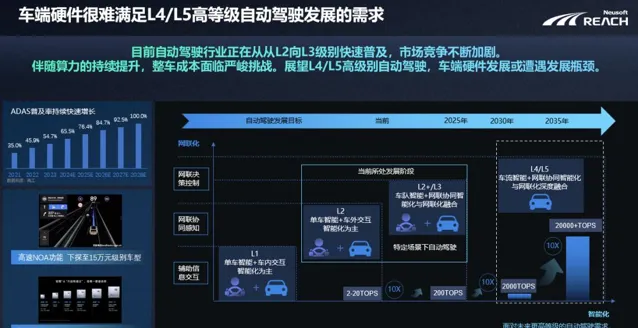
東軟睿馳方面認為,目前自動駕駛行業正在從L2向L3級別快速普及,市場競爭主要圍繞傳感器配置和芯片算力展開,效能及硬件成本正在面臨瓶頸。在此背景下,車企透過結合雲端大模型、邊緣計算的通訊基礎,並借助路端感知與即時動態數據分析,成為其未來實作汽車智能化升級的創新發展路徑。面向未來智能汽車的不斷發展,東軟睿馳打造的車雲一體化全棧產品,透過車端產品技術能力構建與雲端平台能力部署,賦能車企智能化高效創新、持續叠代,同時為智能網聯汽車規模化套用落地提供前瞻技術支撐。
「車路雲」如何實作商業化落地?
「智能網聯汽車是一個高新技術的產品,而一個高新技術產業化應該具備兩個條件,技術閉環和商業閉環。如果有技術閉環未必有商業閉環,但是沒有技術閉環一定沒有商業閉環。」李克強說。
在李克強看來,網聯式智能駕駛迄今為止尚未形成商業閉環,主要有兩大原因,一是當前車路雲一體化研發及示範仍為初級階段,系統以單車智能為主,車企數據尚未接入,也未能接入;二是當前絕大部份車路雲一體化系統仍為煙囪型架構,未實作分層解耦、跨域共用。 他希望透過示範套用能解決這兩個問題。
作為車路雲一體化自動駕駛企業,蘑菇車聯近兩年在全國十幾個省、市有智能網聯車路雲一體化專案。蘑菇車聯CTO郭杏榮向中國新聞周刊表示,車路雲落地過程中遇到問題的原因是多方面的。

圖片來源:中國電動汽車百人會
首先是大家對於這件事情的定位和判斷,我們到底把路側、服務於智能網聯的基礎設施認為是一個公共基礎設施,還是把它當作一個可以變現的資產去建設?
另外,是把智能網聯這樣的車路一體化的專案,當作一種示範性專案去探索,還是把它當作規模化的套用來看待。
「在早期階段做了很多小規模的建設,比如建設一條路十公裏、五公裏,或者劃定一片區域十平方公裏、二十平方公裏。小規模建設雖然有利於控制投入成本,但是從現在來看,小規模示範已經不能滿足於車企和使用者的需要,以及行業的未來發展需求。」郭杏榮表示,「車企的普遍要求是,能夠像NOA的車一樣,全國都能開,如果只是給一個五平方公裏、十平方公裏的區域,其實對使用者收益是不大的,所以他就沒有太大興趣做這個事情。」
「對於行業發展同樣如此,這個行業能夠快速發展,一定是需要規模化效應,規模化之後一方面成本可以快速下降,另一方面整個行業會帶動起來。」郭杏榮說。
第三,中國過往已經比較擅長傳統基礎設施的建設,比如路、橋、房地產這樣的開發建設,在此基礎上,疊加了偏新的商業或者技術模式,需要有新的技術營運商去營運,現在有人稱之為「新質營運商」。「新質營運商」一方面要去規劃整個城市的路側交通設施的選點、布設,要去建設雲平台,還要透過路和雲的數據去賦能到自動駕駛和智能網聯汽車,在當地還要去投放和營運各種自動駕駛汽車,所以需要很多高科技企業的參與。另外,需要有這樣的營運商,它有路側的經驗、有雲的經驗、有車的經驗,將車路雲三端數據真正實作融合。「只建設不營運是產生不了最終效果的。」郭杏榮表示。
「車路雲一體化發展符合技術和產業發展趨勢,保持戰略定力持續推動技術落地。」李克強表示,要客觀看待問題,充分認識當前亟待解決的問題,以及產生問題的解決,形成高質素解決方案,系統化推進。「應該形成凝聚發展路徑的共識,抓緊發展視窗期,需要持續叠代投入,發揮新型舉國體制優勢,透過全域統籌,進一步加大投入,解決問題,早日實作大規模的產業化目標。」李克強說。
作者:劉珊珊










