主動安全系統起作用的原理其實跟自動駕駛系統是一樣一樣的,都包括了感知、決策、執行這三個方面。一套優秀的主動安全系統首先是要感知能力強,必須盡早發現周圍環境的威脅,其次是決策正確,當面對一個威脅時,車輛需要知道如何去規避風險,最後是執行,車輛需要迅速的利用執行器(加速踏板、制動踏板、方向盤)來躲避威脅。
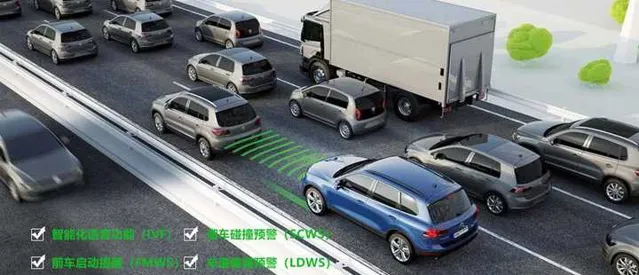
當前的主動安全系統主要依賴於雷達、網絡攝影機等傳感器來感知周圍環境。然而,在復雜的交通環境中,這些傳感器可能會受到天氣、光照等外部因素的影響,導致感知資訊的準確性和可靠性降低。未來的主動安全系統需要采用更高精度的傳感器技術,如激光雷達(LiDAR)、毫米波雷達等,以提供更全面、更精確的環境感知資訊。同時透過多模態融合感知技術,將多種傳感器采集的數據進行融合處理,提高在各種天氣和光照條件下車輛的感知能力,從而更準確地辨識潛在的危險。

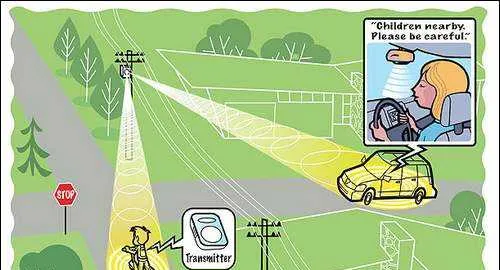
這僅僅是車輛自身傳感器的一個感知能力的提升,最好是能實作車輛與周圍其他交通參與者或者交通基礎設施的無縫通訊。比如說這幾年一直被提到的車聯網V2X技術,它能夠即時的共享車輛資訊,提高交通網絡的協同性和效率。透過車輛與車輛(V2V)、車輛與基礎設施(V2I)等通訊方式,車輛能夠提前預知潛在危險,如交通擁堵、事故或道路施工等,從而做出更合理的行駛決策。
增強數據處理與決策能力將會是未來主動安全系統必定要發展的。面對復雜的交通環境,主動安全系統需要在毫秒級的時間內做出決策,以避免碰撞和保障行駛安全。未來的主動安全系統需要借助人工智能和機器學習技術,提高數據處理的速度和決策的準確性。透過深度學習和模式辨識演算法,系統可以更好地理解復雜的交通情境,預測出潛在的危險,並提前采取預防措施。此外,透過強化學習演算法,系統能夠在未知環境中自我學習和最佳化,以適應各種突發情況和復雜的駕駛場景。
主動安全系統是保護乘客安全的第一道屏障,是在事故發生前就能夠起作用的,所以我們也希望它能夠是最後一道屏障,能夠完全地將威脅、風險消滅在搖籃裏。未來的主動安全系統不會像現在的一樣,車輛行駛條件滿足哪項主動安全功能了,就啟用哪個功能,未來的它能夠將各個功能更好的整合融合起來,利用AI技術來綜合判斷那種執行器起作用對乘客的影響最小。當然,它畢竟是電控系統,安全冗余的設計也會是擺在首位的!











