文章目錄
簡介
Btraj是一個線上的四旋翼無人機的運動規劃框架,主要用於未知環境中的自主導航。基於機載狀態估計和環境感知,采用基於快速行進(FM *)的路徑搜尋方法,從基於構建的歐氏距離場(ESDF)中尋找路徑,以實作更好的時間分配。透過對環境進行膨脹生成四旋翼無人機的飛行走廊。使用伯恩斯坦多項式將軌跡表示為分段Bezier曲線,並將整個軌跡生成問題轉換成凸問題。透過使用Bezier曲線,可以確保軌跡的安全性和高階動力學可行性,可以將軌跡完全限制在安全區域內。
一、介紹
運動規劃問題可分為前端的路徑尋找和後端的軌跡最佳化。對於前端來說,搜尋出的路徑通常是不夠光滑或者受機器人本身的動力學約束限制而無法執行。因此,後端的最佳化模組生成平滑軌跡是必不可少的。
有許多方法可以幫助最佳化路徑以生成光滑的軌跡。基於梯度的方法(如CHOMP)將軌跡最佳化問題表述為對安全性和平滑性的不利影響的非線性最佳化。Minimum Snap演算法將軌跡用分段多項式函數表示,軌跡生成問題被表述為一個二次規劃(QP)問題。
安全性和動力學可行性是透過叠代地添加對違禁極值的約束並重新求解凸問題來實作的,但以這種方式需要經過多次叠代之後才能獲得可行解。另一種方案是沿軌跡采樣時不斷添加額外的約束,隨著四旋翼無人機速度的增加,添加的約束也就越多。在本文中使用伯恩斯坦多項式來表示分段軌跡,是利用了伯恩斯坦多項式的內容,確保軌跡執行上受到安全性和動力學可行性約束。
二、原理
飛行走廊生成
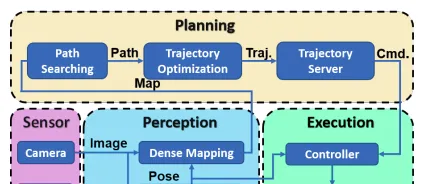
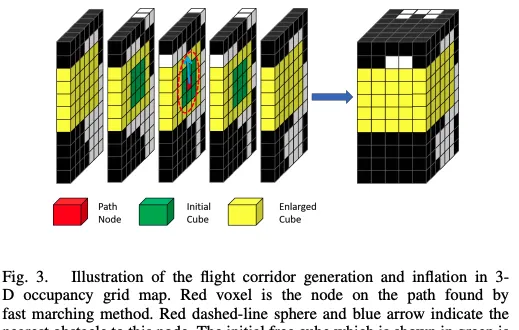
在獲取到路徑規劃出的原始路徑後,提取環境中的自由空間構建用於後端最佳化的飛行走廊。充分利用好自由空間來找到解空間並獲得最優解對於生成軌跡來說是同樣重要的。因此,我們的方法是初始化飛行走廊並進行膨脹。對於路徑中的每個節點,可以透過查詢ESDF輕易獲得從節點位置到最近障礙物的距離。在每個節點處,我們獲得了一個安全空間的球體以抵禦最近的障礙物,並將飛行走廊初始化為該球體的內接立方體。接著透過查詢沿軸方向x,y,z的相鄰網格來擴大每個多維數據集,直到它到達最大的自由體積為止(如圖3所示)。由於我們將飛行走廊初始化為一系列密集節點,因此某些節點可能包含相同的放大立方體,這是不必要的,但會增加後端最佳化的復雜性。因此,需要修剪掉走廊中所有重復的立方體。路徑搜尋、初始的飛行走廊生成和膨脹後的飛行走廊生成過程如圖4所示。
三、專案演示
參考
[1] F Gao, W Wu, Y Lin, S Shen,Online safe trajectory generation for quadrotors using fast marching method and bernstein basis polynomial
————————————————
原文連結:










