曾幾何時,樵兄還特別氣惱定速巡航多「雞肋」,阻礙了我在車流中穿梭,可隨著智能化技術的發展,智能駕駛的發展越來越迅速和先進。

在智能駕駛功能開發中,所能應對的場景越來越多,越來越復雜,同時隨著高精地圖和視覺技術的深入發展,各類場景下的領航輔助駕駛功能,追星逐月。
智能駕駛 vs. 豐富場景
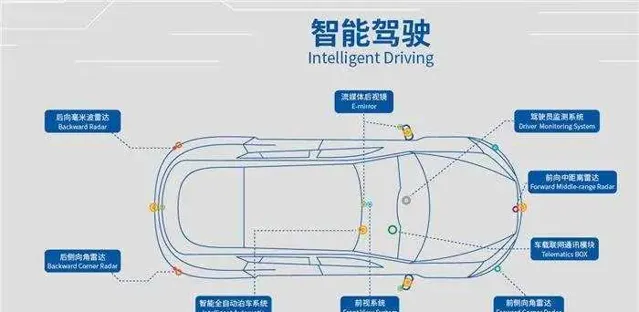
在這裏列舉了絕大部份的汽車輔助駕駛(ADAS)所包含的功能,這些英文縮寫經常把消費者弄得雲裏霧裏,其實相對應得中文含義更為清晰,也明確表達了其適用的場景。
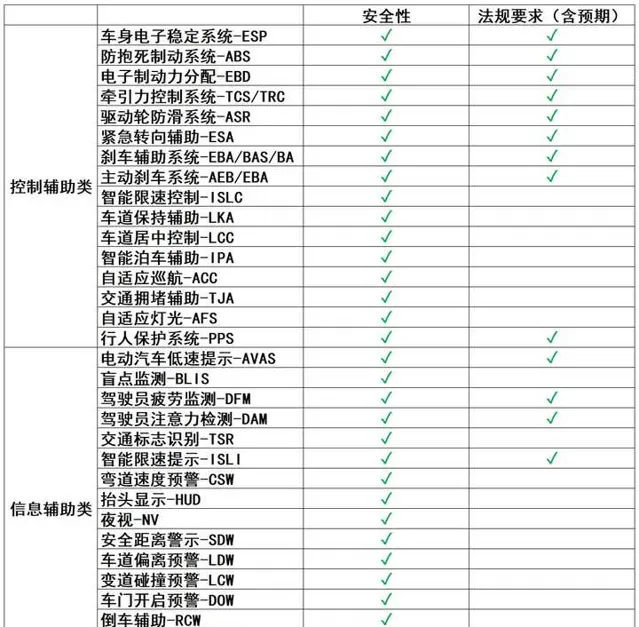
從列表中,我們不難發現,所有得駕駛輔助功能都是在增加駕駛員的安全駕駛內容,有得甚至是各個市場強制要求配置。 基本上分為兩類控制輔助類和資訊輔助類,控制輔助類是主動控制的輔助功能,而資訊輔助則是透過聲、光、電子顯示、振動等感知反饋,提醒駕駛員安全駕駛。
那有人會問,Blue Cusier,X-Pilot,NIO Pilot,Autopilot都是什麽,這些都是一個系統的整體叫法,這些系統是眾多智能駕駛功能子系統的合集,從根本上都是 「感知-融合-決策-執行」 這一整套 「擬人化」 的人工智能產品。
自動駕駛系統,會在感知上,融合多種手段比如視覺視像頭、毫米波雷達、激光雷達、超聲波雷達等,並於雲端數據結合,透過神經網絡演算法和AI學習,提出決策指令,比如路徑規劃、執行器執行等。
可以分兩種自駕情況來談一談智能駕駛功能的體驗。
樵兄是位輕度自駕愛好者,過去的每一年,樵兄的至少長途自駕兩次,短途若幹次,走過新疆天山南北,越過雲貴到達西雙版納,五進五出皖南,甘南大環線途徑洛克之路到達川西,嘗貴州美食美酒,簡單在內蒙古的十分之一的面積上花了條直線就不值一提了。
高速路段居多-領航駕駛/自適應巡航帶我越過雲貴川到達西雙版納
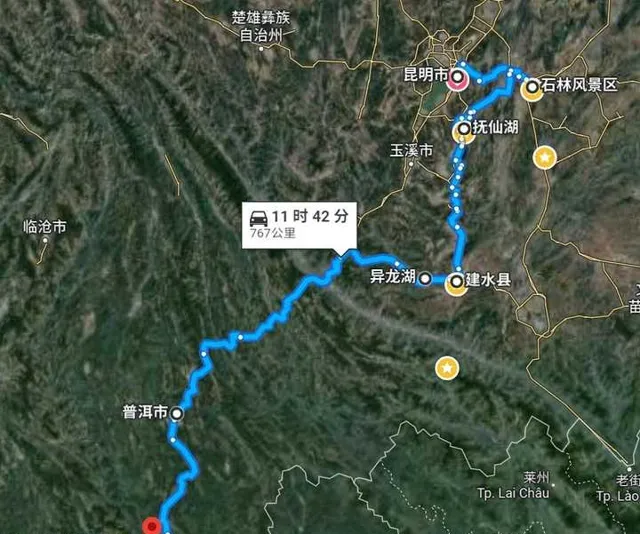
路線:重慶-昆明-撫仙湖-石林-彌勒-元陽-建水-西雙版納
這是一趟高速路段居多的自駕之行,從重慶出發,一路高速直達昆明,樵兄不喜歡熱門,因此把彌勒、建水、元陽作為主要遊玩點,最後到達西雙版納,整個旅程非常驚艷,而連線這些城市的都是高速,感嘆「基建狂魔」的氣概。
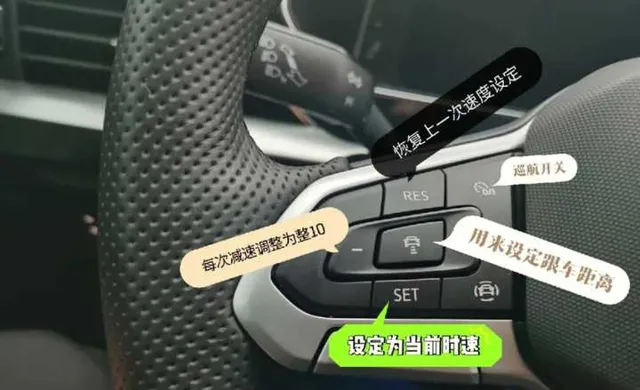
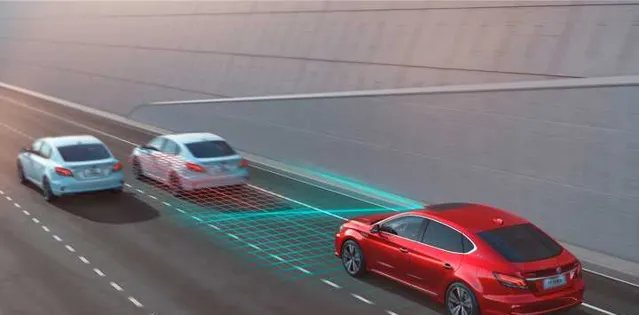
整個旅途之中,自適應巡航(ACC)開啟,選定與前車之間的距離,設定最高車速,簡單。大多時候,你只需要操作方向盤,整個旅程非常的舒適,疲勞感也減輕很多。如果你發現前車過於緩慢,也可以超車,調整跟車目標,保證旅途既安全又快速。
當樵兄疲勞襲來,駕駛員監控系統(DMS)隨時監測到異樣,配合車道居中控制(LCC)就能發揮它的左右,還透過車道偏離預警(LDW)比如方向盤震動、資訊、警報等,提醒我需要休息。
甚至,在長時間駕駛的時候,車子還發出休息提醒,挺貼心的。同樣,對於配備高速領航駕駛的汽車,則更加輕松,能夠解放更多的駕駛員,保存精力。
城市環境居多-智能化助我甘南大環線途徑洛克之路到達川西
路線:蘭州-劉家峽水庫-拉不楞寺-夏河草原-安多合作寺院米拉日巴佛閣-洛克之路-紮尕那-花湖-黃河九曲第一灣-蓮寶葉則-郎木寺
甘南比起環青海湖來說,要小眾一點點,洛克之路、紮尕那、花湖、拉不楞寺、郎木寺,無一不鼎鼎有名,甘南很多時候是青藏藏族文化旅遊的平替,連線他們的是更多國道、縣道、鄉道。有句話說的好,高速和鐵路讓我們錯過了太多的大自然的鬼斧神工和人類的巧奪天成,神聖的雪山和無邊無際的大草原。

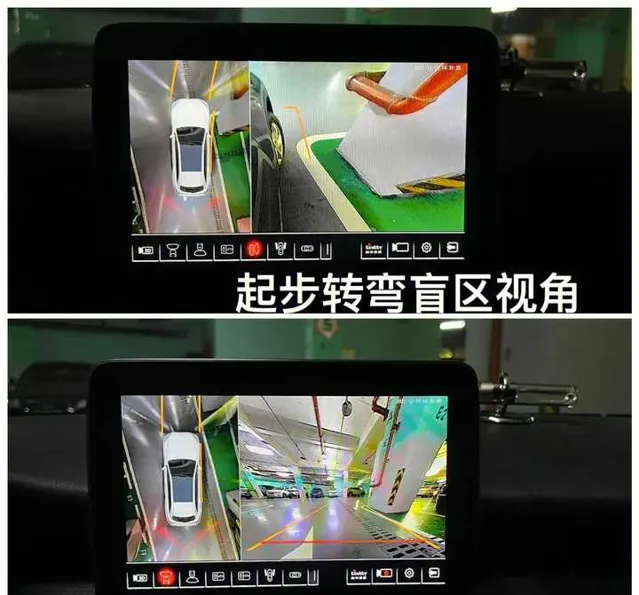
在非高速環境中,智能駕駛功能的領航服務或許不再被經常需要,國道、縣道、鄉道環境復雜,駕駛環境受到光線、行人、障礙物的影響。這個時候,360全景輔助泊車(PA360),以及全副武裝的雷達系統,可以探測多眾多潛在的安全隱患,不懼復雜的路況。轉彎時的輔助影響,也可以幫助你及時了解到可能潛在的安全風險。
低速跟車功能是自適應巡航功能的升級版,以前自適應巡航(ACC)在60km/h的時候,不起作用,現在這種自動跟車功能擴充套件到了低速工況,這樣在城市裏走走停停時,也能夠解決在堵車等待紅綠燈的起起停停,大大減輕駕駛負擔。

諸如此類的控制類或資訊類的智能駕駛功能,還有很多,盲點檢測、剎車輔助等。
安全是汽車智能化發展的核心,就樵兄無論是高速自駕遊,還是鄉間道路穿梭,智能駕駛系統的存在,可以更多的解放駕駛員,減少精力消耗,同時座艙監控系統,保證駕駛員能夠智能駕駛功能被正確使用,亦可監測到駕駛員疲勞,及時提醒。這是一篇真香警告,樵兄體驗下來,還是非常棒的,完全改變樵兄之前的認知。
聊汽車界的八卦和正兒八經,請關註@四方樵。









