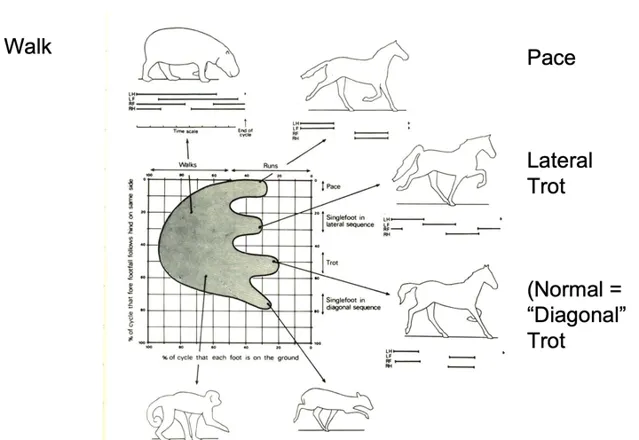
在进入正文前,得介绍一些走路的知识。
人走路的时候,先抬起脚,同时臀部位置上升,动能储存为势能,达到最高点的时候, 势能(PE) 最大;当放下脚的时候, 全部的势能转化为动能(KE) ,推动另一只脚向前,如此反复下去,就达到了能量转换的循环。
这就类似于一种钟摆的机械能交换。理想情况下,如果 PE 和 KE 的涨落正好相反,并且幅度相同,那么系统的外部机械能总量保持不变,不需要任何能量输入来维持运动。

在现实中,不可能回收所有的机械能,总会有损失。如果一种动物能够回收越多的机械能,那么它对能量的利用效率就越高,越节能。

不同的动物有不同的体态、不同的行走方式,这就导致了有的动物走路费力,有的走路省力。
2004年的研究中发现,狗在走路的时候可以恢复70%的机械能 [1] 。
那猫呢?
Daniel Schmitt 做了一个实验 [2] ,找来了6只猫,让它们在一个6米长的跑道上自由行走,跑到上安装了测力板。同时,会在猫咪的肩、肘、腕 、髋、膝、踝和跖趾关节处做标记,拍摄猫咪在运动时关节的位置变化。收集数据后计算猫走路的势能和动能的变化。
 猫步实验
https://www.zhihu.com/video/1510234606586126336
猫步实验
https://www.zhihu.com/video/1510234606586126336
直接说结果,这些猫走路的时候,脚步间隔均匀稳定,平均可以恢复17%的能量,最大只有37.9%,远远低于狗的70%。
也就说,猫咪的走路方式是非常不省力的,这就是走路悄咪咪的代价。 在论文里,猫步也被称为隐身步态。
猫走路省力和它步幅有一定关系。猫在悄咪咪走路的时候,会采取更多的蹲伏姿势,重心靠近地面,步幅更大。猫的步幅角度在25%左右,而之前的研究中,狗的只有15%。
研究观察到,步幅角度越大,能量回收效率越低。下图是能量回收效率和步幅角度的关系:
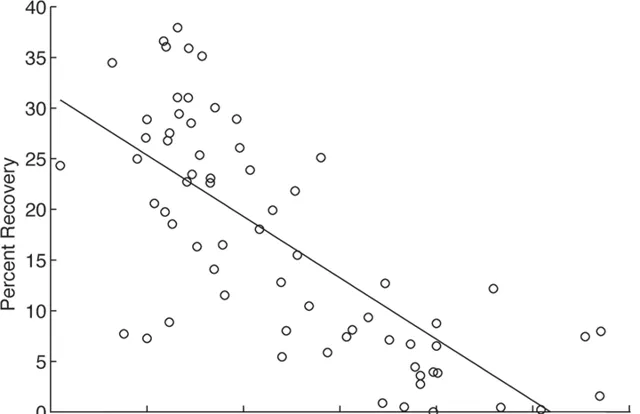
相对于猫来说,狗跑的距离更远,在长途行走中需要节省能量;猫更倾向于跟踪猎物,安静才是关键,所以放弃了能量效率。

另一个研究也可以从侧面说明一猫走路确实更费力。
2014年,科学家找了24只猫和24只狗,测试它们的前肢和后肢对地面的作用力。猫在向前推进的时候,对地面的垂直方向的力大约为3.89 n/kg,狗只有3.03 n/kg [3] 。
可以推测, 不只是猫咪,所有的猫科动物都会牺牲能量效率,来获得更隐身的步态,提高捕获动物的概率。
不够安静的话只能和下面这位一样了。

这只猫走路更可爱(因为猫猫和马在一起生活,所以走路有马的姿态……
 像穿着盛装走路的猫猫
https://www.zhihu.com/video/1510253842487128064
像穿着盛装走路的猫猫
https://www.zhihu.com/video/1510253842487128064
参考
- ^ Griffin TM, Main RP, Farley CT (2004) Biomechanics of quadrupedal walking: how do four-legged animals achieve inverted pendulum-like movements? Journal of Experimental Biology 207: 3545–3558.
- ^https://journals.plos.org/plosone/article?id=10.1371/journal.pone.0003808
- ^https://www.sciencedirect.com/science/article/abs/pii/S1090023314002810











