一. 基础软件安装
安装Ubuntu18.04,此版本比较稳定,也是基于前面ros melodic学习的版本。
二. 下载代码
git clone https://github.com/ApolloAuto/apollo
三. 安装nvidia driver
sudo apt-get update
sudo apt-add-repository multiverse
sudo apt-get update
sudo apt-get install nvidia-driver-455
重启电脑:
reboot
检查是否安装成功:
nvidia-smin
输出如图:
四. 安装docker
cd apollo
bash docker/setup_host/install_docker.sh
五. 安装nvidia docker toolkit
distribution=$(. /etc/os-release;echo $ID$VERSION_ID)
curl -s -L https://nvidia.github.io/nvidia-docker/gpgkey | sudo apt-key add -
curl -s -L https://nvidia.github.io/nvidia-docker/$distribution/nvidia-docker.list | sudo tee /etc/apt/sources.list.d/nvidia-docker.list
sudo apt-get -y update
sudo apt-get install -y nvidia-docker2
重启docker:
sudo systemctl restart docker
六. 启动docker
bash docker/scripts/dev_start.sh
成功会打印:

七. 进入docker
bash docker/scripts/dev_into.sh
八. 编译apollo
./apollo.sh build
九. 启动apollo
cd apollo
bash scripts/bootstrap.sh start
如果报错:

重新执行一次,即成功,显示如下:

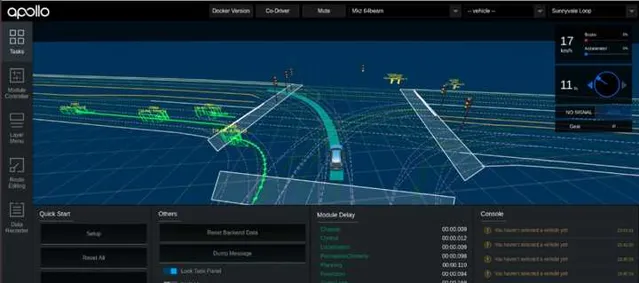
十.打开Dreamview
浏览器输入:http://localhost:8888
如图:

十一.下载数据包
cd docs/demo_guide/
python3 record_helper.py demo_3.5.record
如果速度比较慢,复制链接:https:// github.com/ApolloAuto/a pollo/releases/download/v3.5.0/demo_3.5.record
到浏览器下载。
十二. 播包
cyber_recorder play -f docs/demo_guide/demo_3.5.record -l
log如图

此时界面显示:
完成安装。











