是指经典的感知不确定性导致的规划轨迹画龙问题?

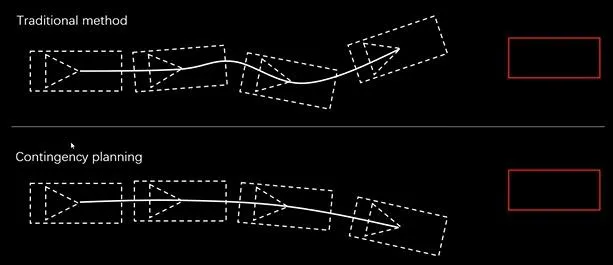
要解决这个问题可以看看 Contingency Planning 的相关内容。一种常用的方法是不只是规划一条轨迹,而是规划一个轨迹树。
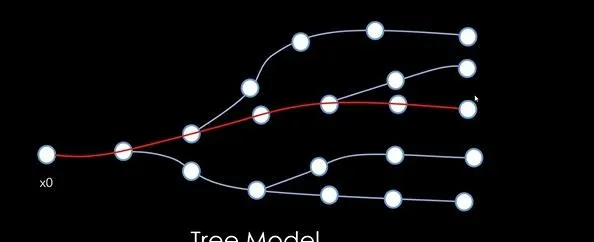
在轨迹树的根部(共用的部分)信息较少,此时规划的轨迹会同时兼容所有可能的决策。当信息充足时,才进行决策(轨迹树分叉),比如决定左转还是右转。这样可以避免画龙的问题。
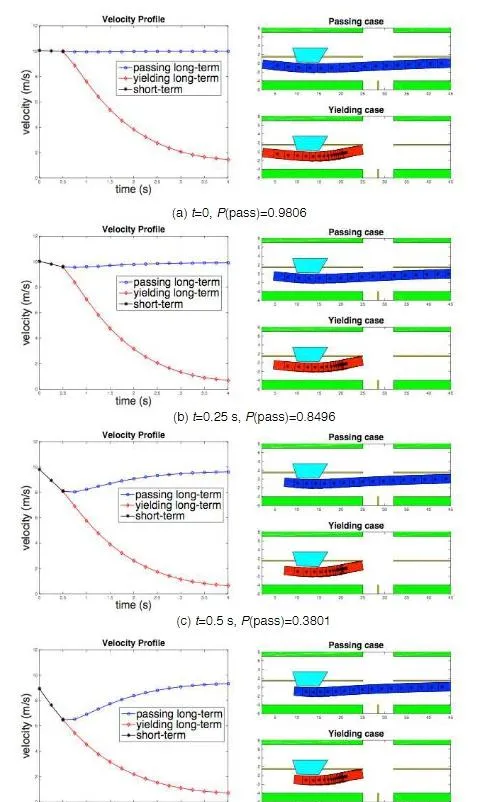
另外, A Non-Conservatively Defensive Strategy for Urban Autonomous Driving - 知乎 (zhihu.com) 中提供了一个十字路口让行还是通过(yield or pass)的情境。从图中可见此时同时规划了pass和yield的两条轨迹,当yield的概率越高(即pass的概率越低)时,共用部分的轨迹会越迁就yield,即便最后是pass,整体轨迹也是先减速后加速。这样整个轨迹的加速度是保持平滑的,避免了在yield和pass之间切换导致的频繁加减速。
@论文推土机 大佬对这方面的文章做了很全面的总结,详见这篇文章。
重点推荐一篇思路比较清晰,方便入门的经典论文Contingency Model Predictive Control (CMPC)。笔者最近有时间可能会尝试复现一下。
另外,根据我自己的理解,这种方法背后的思想,其实是将决策和规划两个独立的模块进行融合,使得最终结果能从 "模块最优"(局部最优) 变成 "系统最优"(全局最优)。从这种思想出发,一种自然的想法就是能否直接将决策规划融合为一个整体的 "端到端" 问题,通过求解这个整体的决策规划问题来得到最优的轨迹? @Invictus 金老师在这篇文章中分享了图森在这方面的一些工作,不过没有讲具体的求解方法(所以大佬什么时候出专著讲讲全局优化算法orz)
文中图片来源
其他参考资料推荐











