本文,主要參考【運動控制系統原理與套用】,【實用運動控制技術】,初步梳理一下運動控制的發展歷程和關鍵的知識點與概念。
運動控制(motion control)是自動化控制的一個子學科。
一、運動控制系統的組成
一個運動控制系統,通常由驅動器、控制器、傳感器三部份組成。
1.控制器:
常見的運動控制器主要有: PLC(可編程邏輯控制器) 、 獨立式運動控制器 、 運動控制卡 、 專用運動控制器 等。
1) PLC
PLC主要功能是對開關量進行邏輯控制,並有簡單的運動控制(直線軌跡控制)、運算數據處理等功能,通常采用觸控式螢幕作人機介面。為擴充其套用領域,各廠家為客戶提供了各種選配功能模組,如多軸運動控制模組、網路通訊模組、模擬訊號與數位訊號轉換模組等。PLC具有工作可靠、編程簡單等優點,但其運動控制功能相對簡單,若選用多軸運動控制模組,則價格較高。
2)獨立式運動控制器
獨立式運動控制器配有顯示器、按鍵和功能完善的控制指令,並有各種通訊介面,控制馬達運動的能力比PLC強大。可完成直線插補、圓弧插補、軌跡控制等功能,且編程簡單。目前,國外的運動控制器都具有現場匯流排控制功能。
3)PCI匯流排型運動控制卡
由於PC機運算速度快、儲存量大,而且Windows作業系統的軟體資源豐富,采用VB、VC等軟體編寫使用者程式,功能十分強大。很多自動化裝置都離不開PC機,特別是采用機器視覺檢測的自動化裝置、需要執行AuoCAD等大型軟體的裝置和需要采集儲存生產數據的裝置等,因此,這些裝置采用 基於PC機的PCI匯流排型運動控制卡 與 PC機 一起組成運動控制器。在所有的運動控制器中,運動控制卡的功能最強,但其工作的穩定性可靠性較差。
4)專用運動控制器
專用運動控制器是針對特定的裝置專門設計的運動控制器,如繡花機控制器、縫紉機控制器噴繪機控制器等。專用運動控制器通常以 微控制器、ARM等芯片 為核心設計,其整合度高、價格便宜、使用方便,軟體是為專用裝置特殊設計的,客戶可直接使用。其硬體、軟體的設計都充分考慮了專用裝置的工藝要求。
相對於專用運動控制器而言,PLC、獨立式運動控制器、運動控制卡被稱為通用運動控制器。
2.驅動器:
作為運動控制中的執行部件一般有電動式、 液壓式及氣動操作三類。
電動式執行部件動作靈敏,效能優良,控制方便,且容易小型化,已經得到廣泛的套用。運動控制中最常用的伺服電機型別有:直流(DC)伺服電機、無刷直流伺服電機、交流(AC)伺服電機和步進電機。按執行電機功率的不同,伺服電機可分為:小功率隨動系統(100W以下)、中功率隨動系統(100~ -500 W)和大功率隨動系統(500W以上)。
每種電機都有相應的特點和驅動方式,詳見裕如:機器人常用電機介紹
3.傳感器:
編碼器、力傳感器、壓力傳感器等
二、運動控制系統的分類
1.按結構分類:
1)集中式控制系統
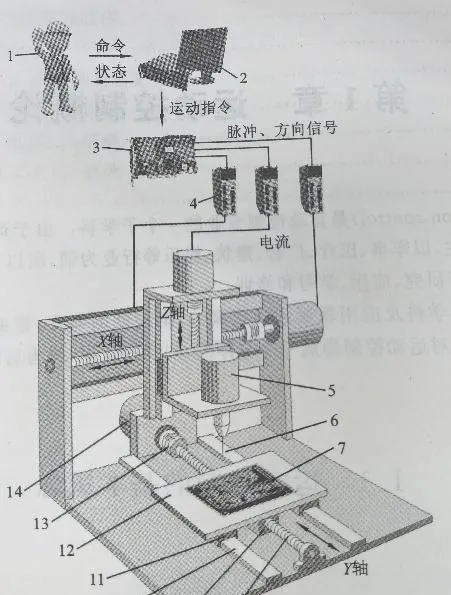
X、Y、Z三軸的伺服馬達由運動控制卡及馬達驅動器控制。運動控制卡內建於工業控制器(motion controller)。 操作員將電路板的設計圖檔輸人電腦,可得到電路板上各孔位的座標數據。運動控制器的套用軟體使用路徑規劃模組自動生成運動距離最短的鉆孔路徑。
根據此鉆孔路徑,套用軟體呼叫一系列運動指令讓運動控制卡產生相應的脈沖訊號和方向訊號控制伺服馬達驅動器,驅動器產生相應的電流驅動伺服馬達旋轉,絲杠推動平台運動,使XY軸協調運動至各個孔的座標位置,然後Z軸控制鉆頭完成鉆孔動作。電路板自動鉆孔機和手工鉆孔相比較:X、Y軸平台運或代替了工人的左手調整電路板位置的動作;Z軸平台運動代替了工人右手操作機器使鉆頭上下運動的動作;運動控制器代替了工人的大腦控制整個鉆孔過程。而且,自動鉆孔裝置動軌跡鉆孔速度可達 300孔/分鐘以上,鉆孔精度可達士0.030 mm。
2)分布式控制系統
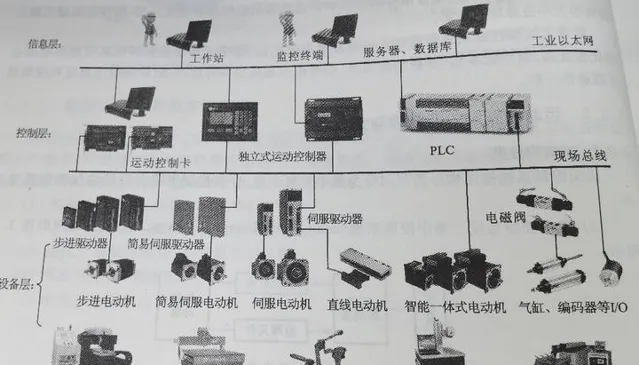
分布控制系統的特點是集中管理,分散控制,故也稱為集散控制系統。它般分為三層:工作站層、控制層、裝置層。
工作站層的作用是監督管理控制層負責完成系統的基本控制功能。分散控制使得系統的可靠性提高,局部的故障不會對整個系統造成重大損失。
由於分布控制系統為多級主從結構,低層單元之間進行資訊交流必須經過主機,從而使主機負擔過重,效率較低。一旦主機發生故障, 整個系統就會癱瘓。分布控制系統的通訊多基於序列通訊介面,速度較慢,而且通訊協定較封閉,這極大地約束了系統的整合和套用。
3)現場匯流排控制系統
基於乙太網路的現場匯流排控制系統
2.按處理器芯片分:
1) 基於電腦標準匯流排運動控制器
它利用電腦硬體和獨立於電腦的運控控制板卡相結合而構成,與編程人員編寫的控制程式相配合,使其具備高速的數據處理特性。運動控制板卡與電腦的匯流排連線形式有 PCI、PCI-E、並口、RS232 介面和 USB 介面。運動控制器主要使 用 DSP 或者 FPGA 等專用芯片,主要控制程式如軌跡規劃、高速插補、伺服控制專 用 I/O 等主要都執行在專用芯片上。通常使用者可以根據其開放的函式庫,在 Windows 和 Linux 等平台下自行開發套用軟體。
2) 軟開放式運動控制器
軟開放式運動控制器是基於 PC 的運動控制,其所有的運動控制軟體都安裝在 PC 上,其硬體部份包括上位機 PC 和下位機負責具體發送與接收控制指令的外部 I/O。在作業系統平台,開發者在即時核內,開發運動控制模組,可操作性和靈活性大大增加。由於使用的是大規模制造的 PC 降低了制造成本,基於作業系統開發的軟體,改造和升級靈活,為發開人員提供了一個開放性的開發平台。
3) 嵌入式結構的運動控制器
這種嵌入式控制器的特點是把 PC 上執行的系統移植到了裏面,各硬體專用性很強,它可以單獨執行系統。這個運動控制器的特點是把 PC 嵌入到運動控制器中, 各硬體專用性很強,它可以獨立執行。控制器與控制器之間可以透過匯流排方式進行 通訊,在工業自動化當中廣泛套用。
3.按控制方式分類:
1)開環控制系統
類系統套用最廣泛,為數位式運動控制系統,通常都采用步進馬達。操作者接通機器電源、按下自動加工按鈕後,運動控制器根據自動加工程式向馬達驅動器發送指令脈沖P;驅動器采集指令脈沖的頻率、脈沖數,並對控制訊號進行功率放大,透過調節步進馬達線圈的電流i從而控制步進馬達的運動;步進馬達將電流訊號轉換為機械運動,輸出相應的轉速和轉角a;傳動機構將馬達輸出的轉角訊號轉換為運動平台的位移量x。

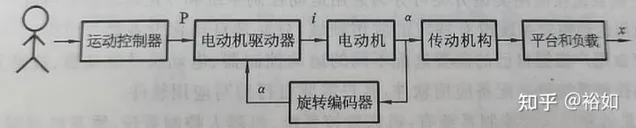
2)半閉環控制系統
這類系統也是數位式系統。這種系統中的馬達都配有旋轉編碼器,它將馬達輸出的轉速、轉角訊號反饋到馬達驅動器中,在馬達驅動器閉環控制下,可以確保馬達輸出的轉角位置十分精確。目前交流伺服馬達、直流伺服馬達,以及部份步進馬達都配有旋轉編碼器,其驅動器都具有位置閉環控制功能。
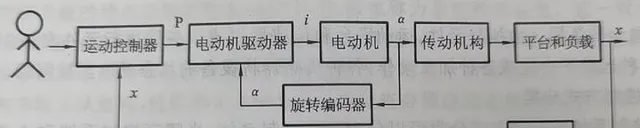
3)全閉環環控制系統
這種系統的運動平台上安裝了光柵尺,用於檢測平台的實際位置,並反饋給運動控制器。控制器根據反饋訊號隨時調整發給馬達驅動器的訊號,使運動平台的誤差始終控制在精度範圍以內。
對於全閉環控制系統,其傳動機構、運動平台和負載產生的各種誤差都即時反饋到運動控制器中,並能立即得到補償,所以該類系統具有控制精度高的特點。
全閉環控制系統多為模擬式系統,現在也有數位式閉環控制系統。
三、運動控制系統的案例——機械臂
作者:韓峰濤 連結:https:// zhuanlan.zhihu.com/p/28 052497來源:知乎 著作權歸作者所有。商業轉載請聯系作者獲得授權,非商業轉載請註明出處。
我們使用類比的方式,參考電腦行業的分層形式來介紹機器人控制系統的範圍,見下圖:

機器人的套用工藝包
如同電腦的作業系統一樣,機器人控制系統在整個工業機器人產業中,扮演了最基礎的軟體平台的角色。
當你購買了一台工業機器人後,透過編程的呼叫其控制系統內建的基本功能可以滿足很多場合的需求。如果內建的功能滿足不了要求,那麽可以
選裝某些特定行業的套用軟體包
,譬如打磨、力控、分揀、焊接、噴塗等。
控制系統提供平台,套用軟體在平台的基礎上擴充套件套用範圍,提升使用體驗。
在工業機器人發展的歷史行程中,有很多優秀的細分套用軟體公司,透過使用新的技術,研究新的工藝,在某個細分方向上成功拓展了機器人的套用範圍。這些公司有的獨立成長為了某個工藝領域的套用專家,利用與機器人廠家客製的專用機器人加自己獨到的套用軟體包在細分領域獨領風騷,例如噴塗的DURR,焊接的CLOOS等;有的則成功被機器人整機廠商收購,其套用技術並入到機器人控制系統的框架中。
這幾年深度學習技術在機器人路徑規劃、視覺方面有不少套用案例,這些技術增強了機器人在面對非結構化環境時的套用水平,同時也解決了之前透過固定編程方式不能解決的一些套用問題,對於擴充套件機器人的套用範圍有著積極的意義。
那做機器人控制系統和做套用軟體哪個難度更大,門檻更高? 這個問題沒有絕對的答案,取決於做的深度與廣度。微軟也不敢說一定能做出媲美Photoshop的影像處理軟體,Adobe全力投入幾十年也未必做不出Windows,最終的答案取決於公司的發展歷程與戰略取舍,相信每一位深耕行業的專業人士對此都會有自己的判斷。
機器人控制系統
Robot by definition is 「software-driven mechanical system「.類似於電腦和手機,工業機器人是一種非常典型的軟硬結合、機電一體產品。
這樣的產品都遵循這樣一個原則:
硬體決定效能邊界,軟體發揮硬體效能並定義產品(機器人)的行為。在相對成熟的市場中,當大家使用的硬體趨於一致時,透過軟體來進行產品差異化並創造價值是常見做法。工業機器人行業經過幾十年的發展,硬體進步速度已經大為減緩,主流廠家的硬體配置基本相同,國產廠家也可以購買到與進口品牌相差不多的零配件(當前價格會高不少),這時機器人的控制系統就成為了決定機器人效能和功能的主要因素。
假如我們有兩台機器人,配置分別如下:
- 進口ABB的機器人控制器 +國產伺服系統+國產減速器+國產機械本體;
- 國產機器人控制器 +進口伺服系統+進口減速器+進口機械本體;
那麽哪一台的效能會更強,功能會更多?
答案想而易見,沒有人會認為第二種配備國產控制器的機器人能PK過第一種使用ABB機器人控制器的機器人,即使效能好的方案除控制器外幾乎全部使用了國產零部件。
既然控制系統如此重要,而且 到目前為止國內沒有開發出可與市面主流機器人品牌原生系統效能接近的控制器產品 ,那為什麽會有「控制系統門檻最低」的結論,或者說錯覺?我覺得原因主要有三個:
- 國內缺乏對機器人控制和整機產品研發有深入認識的團隊和公司 。對一個問題的正確判斷有賴於對問題和背景的深入了解。國內工業機器人產業起步較晚,缺乏對高效能機器人產品研發有足夠經驗積累的團隊和公司,誤以為機器人只要能動起來那麽控制系統就夠用了,導致很多人錯誤的認為控制系統很簡單。
- 國內機器人產品還普遍面向中低端市場,客戶對國產機器人的效能幾乎沒有要求 。在這種市場需求下,很多公司對自己生產的機器人產品僅僅要求可以動起來,滿足一些精度、速度、功能要求不高的場合,那麽使用第三方的控制系統或者使用各種運動控制卡拼湊的控制器是可以滿足要求的。我們不能說這樣的做法是錯誤的,因為市場需求決定產品定位與設計,既然中國存在大量低端的需求,那麽這樣的機器人產品也就有其存在的價值。但是在相對有限市場空間的工業機器人領域,長期面向低端的公司將無法獲得足夠的利潤來支持其走向中高端,如果國內所有的廠商都是如此,那麽國產機器人行業將極有可能重蹈機床行業的覆轍,在短暫的銷量高潮之後,跌落回出貨量很大但是大部份利潤被國外CNC軟體系統商拿走的境地。
- 人們對於無法看到和無法直接對比的參數缺乏直觀、準確的認識 。像減速器這種看得見摸得著的部件,有經驗的老師傅可以非常直觀的看出國產產品與進口產品之間有多大差距。大眾更習慣於關註看的見的差距,而忽略真正隱藏在背後的差距。這種現象其實在電腦行業也有可參考的例子,各位現在可以回想一下自己平時用的生產力軟體(Office、CAD、CAE、科學計算、仿真分析、視訊剪輯、音訊編輯、平面設計等),有多少是國內廠商提供的? 幾乎沒有 。國內正版使用者每年都需要付出巨額費用來購買這些軟體產品。但是在你的印象中,聽到國內外CPU差距很大是多久之前?聽到有人談中外軟體差距很大又是多久之前?抑或從來沒有聽過軟體差距很大的說法?中外生產力軟體產品之間的差距可能沒有芯片之間大,但是仍然不能掩蓋國產專業軟體的落後,也正是這種思路的蔓延導致了機器人控制軟體不受重視。
機器人的結構本體
從1973年ASEA(1988年,ASEA和BBC Brown Boveri合並組成了現在的ABB公司)釋出全球第一台全電動工業機器人到現在已經過去了40多年,期間雖然減速器和伺服系統方面一直在持續不斷的進行減少體積、提高響應性、降低傳動誤差等改進,但是這種改進更準確的講是一種循序漸進的改良而非突破。工業機器人的套用領域能從最初的用來組裝變速箱擴充套件到現在的焊接、噴塗、裝配、貼片、點膠、打磨、拋光、分揀、搬運、碼垛、檢測、註塑、切割、測量、沖壓、包裝等數十個領域,絕大部份靠的是機器人控制系統在架構、控制、規劃、工藝流程、人機互動等方面的革新。以最近非常火爆的協作機器人為例,雖然有著與傳統機器人很大不同的外觀,但仍應該將其看做是 在傳統電機和減速器基礎上的產品創新,或者更準確的說是控制的創新與軟體的創新。
設想若幹年後的機器人市場,彼時的贏家,靠的也不會是市面上花錢就能購買的所謂「核心零部件」,而是依靠掌握核心演算法和完善功能的控制系統軟體以及優秀的整機產品研發能力。因為機器人首先是「software-driven mechanical system」,是軟體驅動的機電系統;作為系統整體而存在,也作為整體而設計。現實情況也正是如此: 主流的機器人都是自有控制系統 。硬體決定效能邊界,軟體發揮硬體效能並定義機器人的行為。任何一家想真正造機器人的廠家都不會放棄定義自家機器人行為的機會。











