編輯 | CV君
報道 | 我愛電腦視覺(微信id:aicvml)
在今年CVPR 2021 Workshop on Autonomous Driving 主辦的 Argoverse 運動預測挑戰賽(Argoverse Motion Forecasting Competition)上,來自國內自動駕駛公司輕舟智航的Blue Team一舉奪魁。
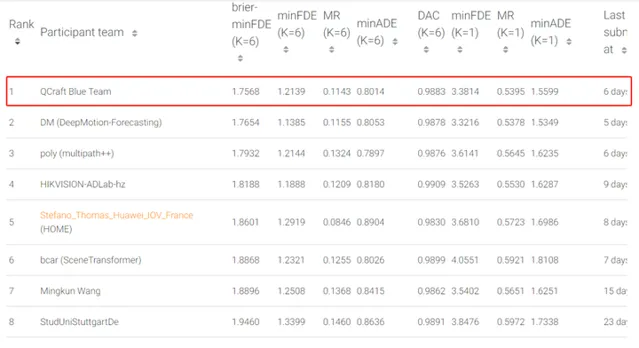
比賽結果排行榜:
https:// eval.ai/web/challenges/ challenge-page/454/leaderboard/1279
運動估計與路徑規劃是自動駕駛系統智慧性的最直接體現,對行駛安全性起到了決定性的作用,因為現實路況的復雜性,運動估計一直是自動駕駛的一大難點。
該比賽吸引了自動駕駛領域國內外幾十支團隊參賽(包括海康威視、華為等),輕舟智航在本次比賽的決勝關鍵指標brier-minFDE上取得了顯著的優勢。
賽題及數據介紹
該賽事是在 Argoverse 數據集上進行,對道路使用者的運動進行預測,以促進自動駕駛技術的進步。
Argoverse 數據集是由Argo AI公司等采集標註後釋出的用於自動駕駛 3D Tracking 和 Motion Forecasting研究的數據集。數據集包括兩個部份:Argoverse 3D Tracking與Argoverse Motion Forecasting。
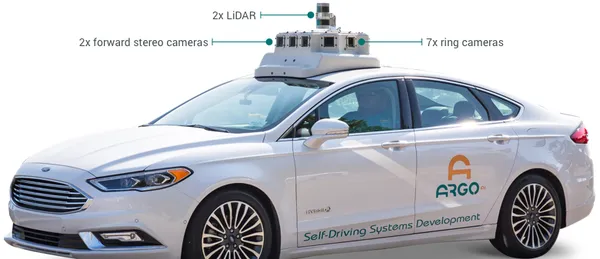
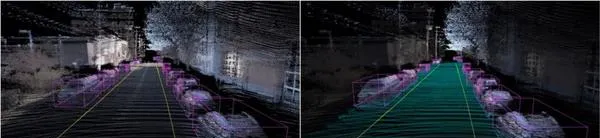
其包含LiDAR雷射雷達、 環繞360度RGB視訊數據、前向立體數據、6 DOF的定位數據以及高精地圖,所有數據都跟高精地圖數據進行過配準。

Argoverse是第一個包含高精地圖的數據集,它包含了290 千米的帶有豐富幾何形狀(車道線等)和語意資訊(可行駛區域等)的高精地圖數據。
比賽要求參賽者根據汽車的狀態和環境數據,預測各個道路使用者接下來的運動軌跡。
評價指標
本次比賽中對於道路使用者最多可以預測6條軌跡,伺服器計算了多個評價指標,但最終排名以 Brier minimum Final Displacement Error (brier-minFDE)為準。
其中 FDE (Final Displacement Error),即預測軌跡與真實值(ground truth)終點的L2距離。
minFDE意為在預測的所有軌跡中與真實值相比終點距離的最小值,也就是說從終點看預測最好的那條軌跡。
brier-minFDE 則是考慮了不同預測軌跡的機率的度量結果 的Brier Score(其定義來自論文Brier, G. W. Verification of forecasts expressed in terms of probability. Monthly weather review, 1950.)brier-minFDE的計算方法是在 minFDE 上加了(1-p)^2,p為預測軌跡的機率。
由以上定義可知,brier-minFDE是考慮了演算法預測距離誤差和機率的綜合考量。
輕舟智航冠軍方案
據悉,輕舟智航獲勝方案基礎演算法架構將原始高畫質地圖數據組織為Lane graph,使用拓展的GCN建模復雜的車道拓撲關系。
重要貢獻
輕舟智航獲勝方案最重要的貢獻是一種新的遠端圖註意力機制,用於對高畫質地圖中的車道圖進行編碼。
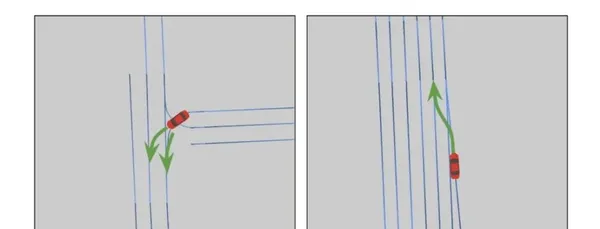
這種設計的動機是,因其觀察到城市地區的車道可以透過鄰居、後繼和前任等基本互動型別的組合形成非常復雜的排列,在這些排列中,車道不僅與直接連線的車道有互動,也會與其他不直接連線的車道交互作用。
例如在下圖的左子圖中,汽車在轉彎的車道,但卻拐向了不與轉彎車道相連的車道中,而在右子圖中,車輛行駛中因為當前車道線消失,車輛可能並入左邊第一車道,但也存在大量的車輛進入左邊第二個或其他車道。
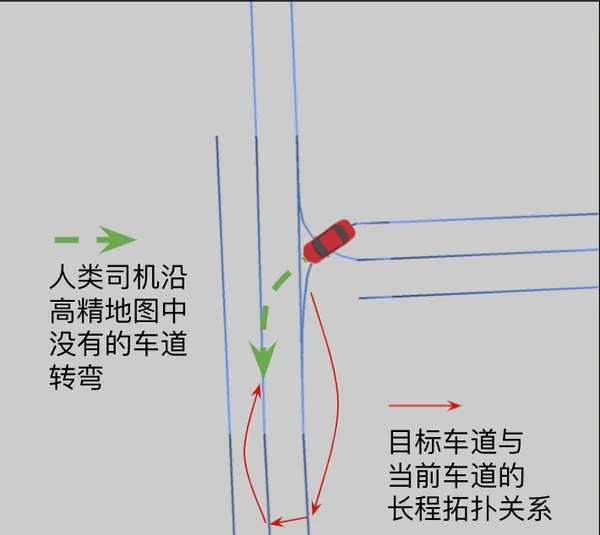
自動駕駛所使用的高精地圖雖然分辨率高、細節豐富,但仍然不可能完全覆蓋人類司機駕駛行為的各種變化。因此,預測演算法要理解人類司機的復雜行為,就需要對高精地圖中車道間關系的高層次組合進行語意理解。
傳統圖神經網路的只考慮直接的拓撲連線關系、透過多層組合擴大感受野的方式是不夠的,輕舟智航團隊提出的長程圖註意力機制有更大的靈活性,可以成功理解復雜的車道互動關系。(目前論文尚在投稿,具體構建方法後期會在論文中詳述)。
作者實驗發現,使用新的圖註意力編碼高畫質地圖在所有評價指標上帶來了顯著的提升。
另外作者的其他重要創新點包括:
-
將軌跡分類損失函式使用高斯混合模型上的negative log likelihood loss;
-
透過K-means聚合軌跡模式,構築了模型整合方法。
以上兩項方法雖對ADE和FDE(軌跡預測誤差)的影響不大,但顯著改進了軌跡機率預測,所以大大提高了最終 minFDE 的 brier score。
自動駕駛超級工廠
特別值得一提的是,輕舟智航不僅在演算法研究上緊跟前沿,在數據采集和處理技術上也積累頗豐。輕舟智航今年入選CVPR的一篇論文借助自監督學習,從未標註的雷射雷達點雲和配對的相機影像中獲得了點雲運動資訊,在不需要標註數據的情況下,就可以較好地理解交通參與者的運動。並且開源了程式碼,連結如下:
https:// github.com/qcraftai/pil lar-motion
眾所周知,目前的智慧汽車都搭載有多類高精度的傳感器,比如網路攝影機、公釐波雷達、雷射雷達等,用於實作不同等級的自動駕駛以及智慧網聯功能。在智慧汽車行駛的過程中,會產出大量的數據,其中就包括車輛自動駕駛功能在執行過程中遇到的邊界化難題(Corner Case)。據了解,一台具備L4級別自動駕駛功能的車輛日常產出的數據量可達TB數量級,收集到眾多珍貴的Corner Case。是否能在合法合規的前提下對這些數據進行收集和使用,對於自動駕駛技術的高效叠代來說至關重要。
輕舟智航打造的自動駕駛超級工廠,可自動化地完成數據收集、數據清洗標註、仿真評估以及大規模仿真場景生成等流程。其中大規模智慧仿真系統讓測試成本大大減少,達到路測成本的1/100,還可以拓展1000倍於實際路測裏程、模擬各種極端情況,同時準確衡量各個自動駕駛軟體版本的水平。
憑借自動駕駛超級工廠,輕舟智航可基於多種車型實作L4級別自動駕駛功能,應對各類城市復雜交通場景。











