筆者7年前第一次體驗無人駕駛汽車的時候,並不了解SAE自動駕駛分級是什麽(SAE J3016首版釋出自2014年),只是對現場工程師的那句提醒印象深刻:「不好意思,我們提醒大家請不要碰車內任何東西,這台工程樣車要數千萬。」這輛雪佛蘭EN-V 2.0給我很大的驚喜與驚訝,驚喜的是我們未來可能再也不需要把時間都浪費在通勤上了,驚訝的是美國已經研發出不需要方向盤就能開的車,是否意味著中國這個剛能造點正經車的乘用車產業,要被降維打擊一夜回到解放前?

感謝這幾年來中國GDP的穩健增速,我才有底氣寫後文提到的蕩氣回腸的內容。在智慧化大勢之下,我們的自主品牌汽車產業沒死,正在奮力抗爭,且勢頭並不差。我們為何要發展自動駕駛? 因為重工業是國際話語權。 很抱歉一開頭就說這麽沈重嚴肅的話題,但必須如此才能讓文章思路更加清晰。中國是汽車工業的後來居上者,不過只是產銷量連續11年稱霸世界第一席位,技術與品質可還沒能力封狼居胥。簡單來說,中國是「汽車大國」而非「汽車強國」。筆者在國際貨幣基金組織官網找了一組新的2020年名義GDP數據,大家了解一下全球Top 10經濟體當前的情況:

此前IMF預測中國在2020年的全球經濟占比是17.77%,實際上中國一擼袖子加把勁幹出了18.15%。我們再掃一遍上面列表中的10個國家,沒有任何一個是能脫離汽車工業而繁榮的。我們不要小看印度,它可是全球第五大工業國,同時也是全球第五大汽車工業國;也不要覺得加拿大汽車工業沒地位,那可是全球前十的汽車工業大國。再看下表的人均GDP,數據依然來自IMF。可以看到這四等已開發國家裏面,實際上有話語權的國家都是有強大汽車工業基礎的,瑞典應該是唯一的例外。
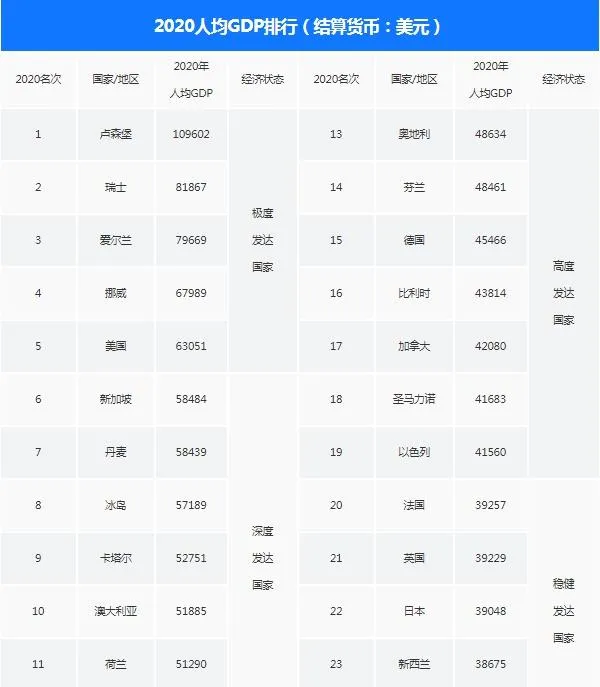
想要說話擲地有聲,你手頭得有汽車工業。 因此,發展自動駕駛也是大國賽局的需要。 我們把時間線放長一點看,第一次和第二次工業革命重新劃定了這個世界由誰剝削誰,結果分贓不均就打了兩次世界大戰(實際上是同一場),接下來是第三次工業革命,世界格局從熱戰變冷戰,幾十年後冷戰落幕,現在大國之間只打經濟戰。美國、中國、歐盟,三者已成經濟三極。中國GDP已經有美國72.8%了,並約等於沒了大英之後的歐盟總體GDP。每一極都在汽車領域爭奪話語權,美國有太空霸權、衛星定位、高精地圖、自動駕駛、芯片技術等硬核優勢,後起的中國有完整的制造業鏈路和崛起中的智慧汽車產業氛圍,歐盟哪哪都不弱就虧在不是統一政權。

汽車工業是最考驗綜合國力的產業,上下遊數百個門類、數千家企業參與,才能造出一台車。大眾集團2020年營收2714億美元,德國全境GDP總量3.78萬億美元,大眾集團占德國經濟比重高達7.18%,「富可敵國」就是說的這種情況。所以,國與國之間的爭鬥,必然要涉及汽車領域。要打擊他國汽車,欲加之罪何患無辭,豐田剎車門、現代油耗門、大眾排放門,這些在美國市場發生的事件,就是外企不肯屈服於美國政府,直接被強權打壓了。除了是大國賽局的棋子,自動駕駛技術的研發還能減輕駕駛負擔(提升產品競爭力)、提升行車安全、通行效率、為社會創造高薪就業崗位,但這些都不是重點,國家之間的利益制衡才是。汽車工業之爭的下一階段就是電動化與智慧化,而智慧化的關鍵在自動駕駛,我們今天要聊的話題。L3是不是走進了死胡同?資本騙局or法律黑洞?筆者還記得2017年奧迪釋出D5世代A8時的盛況,第一款量產SAE L3級自動駕駛系統基於第五代奧迪A8誕生了。雖然當初我已經預判過這套系統入華之後並不能使用,但並未預料到它在西方國家也沒能自由跑起來。後來,江湖傳言說是「花10億歐元解決了L3」的奧迪自動駕駛計畫組,被整合至統一的大眾集團Car.Software車載軟體開發部門,一個開啟自動駕駛新時代的功勛計畫組就這樣消失在汽車歷史中。別急,其實對於奧迪而言是明降暗升啊,因為Car.Software的總部因此從狼堡遷至英高爾施塔特,奧迪成為了集團的智慧化大腦中樞。
回到主題。以美國為首的自動駕駛行業當初定義自動駕駛等級的時候,並未發覺L3居然是一個非常尷尬的分級(下圖是筆者畫的,供形象理解),它的尷尬之處在於任由人類駕駛員「撒手不管」,但又要求人類駕駛員「必要時必須立刻回來接管」,無法形成邏輯閉環,有巨大的安全風險。
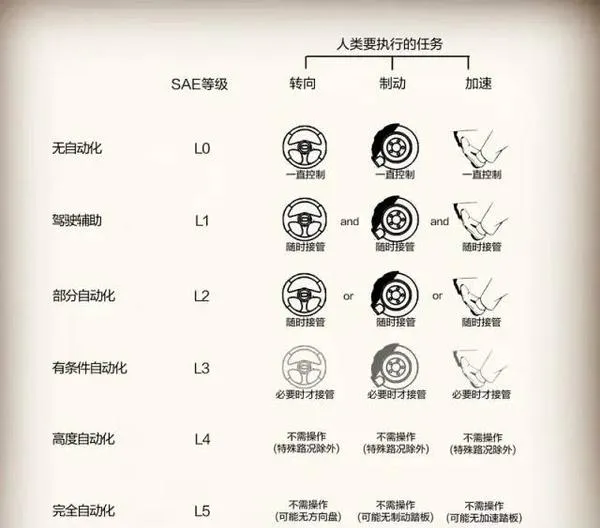
在這裏,我們簡單匯總下SAE規則下自動駕駛等級的異同: L1:解放腳 (基本是人類在開)L2:解放腳、手 (限定條件內人機混開,基本是人類在開)L3:解放腳、手、眼 (限定條件內人機混開,基本是系統在開)L4:解放腳、手、眼 (全區域由系統開,特殊情況除外)L5:解放腳、手、眼 (全區域/全時域由系統開)P.S. 2021年1月1日施行的【汽車駕駛自動化分級】國家標準也對自動駕駛進行了分級,整體規則與美國SAE標準保持一致。到了L3之後,就要完成自主代客泊車AVP(Automated Valet Parking)、交通擁堵引導TJP(Traffic Jam Pilot)、高速公路引導HWP(HighWay Pilot)這些主要的功能,可是L3有個最大的問題——L3的交通事故權責模糊不清。 簡單來說,L0-L2是人類駕駛員全責,L4-L5是汽車智慧系統全責, L3是一灘永遠吵不清的糊塗賬。因此,現在很多車企都在說自家的自動駕駛輔助系統是L2.5、L2.9、L2.99等等,無論什麽話術,意思就是「沒到L3」,所以車企暫時不需要負責。實作L4的難度有多高?因此,目前有不少部份達到L3功能但只能按照L2來使用的車型,比如四代奧迪A8、特斯拉FSD Bate版、蔚來ET7、智己L7、小鵬P5、極狐AlphaS HI版等等。現在業界有可能直接跳過權責模糊不清的L3,直接把L4投放到市場上。目前已有車企決定這樣子做了。像谷歌這種解決方案供應商則不同,他們不需要把研發成果繫結在現售車型上循序漸進叠代更新,沒有包袱的他們選擇了直奔L4。整車L4水平,需要在全場景下實作包括自主代客泊車AVP、交通擁堵引導TJP、高速公路引導HWP在內的所有功能,也就是車子自己能走能停完全不需要人類交涉。當然,L4是可以保留車輛操縱單元的,在特殊情況下可交給人類操縱,比如地震海嘯造成車輛通訊的情況。先說AVP。之前我們聊過小鵬的自動泊車,而小鵬一直都是以此為豪的企業,泊車成功率不低。小鵬此前的方案是利用汽車傳感器進行室內地圖建模,這種在非市政道路收集地圖數據的方式也避開了法律屏障,雖然看起來精度並不高,但也算是一個不錯的開始。
今年6月4日,小鵬P7透過OTA更新的VPA停車場記憶泊車(Valet Parking Assist)。這裏我們就要科普一個概念:AVP分為兩個分支,一支叫H-AVP(雲端自我學習泊車),經過SLAM系統訓練之後完成地圖建模了就能持續使用,也就是來一次以後就隨時來,小鵬、奔馳、威馬在整;而更高階的P-AVP(雲端高精地圖泊車)只需駕駛員開到停車場門外就可以離開駕駛席,車子自己會按照高精地圖的指引找車位泊入,暫時還沒車企能量產。
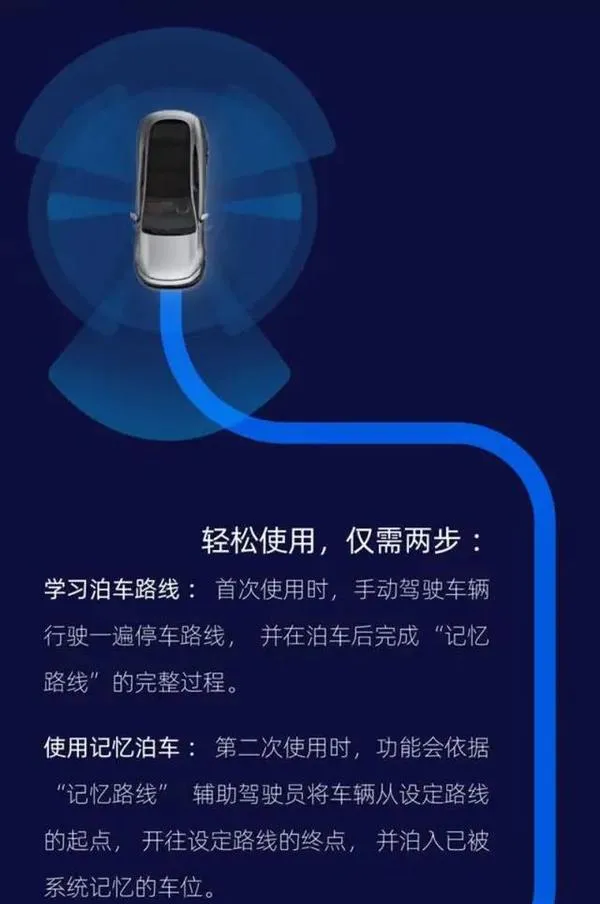
小鵬這次的更新是VPA停車場記憶泊車,功能實作上與W223世代奔馳S級和威馬W6還是有所不同的。小鵬的VPA是自研完成的停車場記憶泊車功能,它的記憶路線可以達到1km,一台車可以學習100個停車場的泊位,不過單個停車場只記憶1個泊位,還不如少點車場但每個多點泊位比較實在,而且小鵬的VPA只支持泊車入庫,不支持出庫。還有一點筆者有點理解不了的是,小鵬VPA不支持跨層泊車、沿線出庫、全程APP車外操作也就算了,為何僅支持地庫泊位,在地面泊位用不了,W223和W6倒是沒有這個限制。

從使用場景來看,威馬目前開放的H-AVP能夠在地面/地下停車場內任何地方都可以進行學習,不限起點位置,不限車場數量,單個車場可設定5條不同的入庫/出庫路線,可以跨層,駕駛者不用在車上,只需要透過手機一頓操作能完成車輛的泊入和泊出,對於那些過窄的、停好之後無法開門出來的停車場景來說很實用。除了目前已經開放的H-AVP,威馬官方還透露將會在年內透過OTA將P-AVP推播給使用者。

威馬的AVP是與國內自動駕駛實力擔當的百度Apollo平台聯手深度研發的,有百度「王牌」做背書,以後的P-AVP還有百度高精地圖加持。小鵬是沒有參與進來的,威馬則有百度高精度地圖加持,所以實作P-AVP更容易一些。包括奔馳在內的海外品牌想進入中國做自動駕駛,以後應該得用中國高精地圖才行,現在連特斯拉都被要求把伺服器建在大陸境內了,可見高精度地圖在自動駕駛中也扮演著十分重要的角色。此外,要玩P-AVP,還要等室內基站通訊硬體整起來才行,這需要更多的基建設施配合。

接下來聊交通擁堵引導TJP和高速公路引導HWP。TJP和HWP的速域不同,再加上自動車道變換(ALC,Automotive Lane Change),就是全速域的「有限自動駕駛功能」。TJP的決策和執行是一大難題,標定不好的TJP策略就會出現起步與制軔的動作太過生硬,快了體感難受,慢了被旁邊車子加塞,一來一去就暈車了……HWP+ALC就是現在很多新勢力在談的「高速領航功能」,蔚來叫NOP,小鵬叫NGP、特斯拉叫NOA、日產叫ProPilot、通用叫SuperCruise,反正都是一個意思。目前這項技術進展很快,實際使用起來比較便捷,人類駕駛員介入的頻率並不高,小鵬官方給出的NOP介入頻率是0.66次/100km,實測接近1次/100km,也即是平均開100km才需要接管。不過,以上TJP和HWP暫時均不能達到L4級別,只能在特定條件下(合適的路況/天氣)進行約等於L3級別的自動駕駛。

如今奧迪A8、蔚來ES6、特斯拉Model 3、小鵬P7、廣汽埃安LX、長安UNI-T、日產天籟等等車型都可以執行TJP、HWP、ALC,但因為傳感器配置並不甚完備、高精度地圖與定位技術還沒到位等原因,除了A8之外的車型都要求駕駛員隨時隨地立即接管車輛(L2-L3之間);A8則在限定條件下(特定的道路等級、光照、車流速度等)可由L3系統完全控制車輛,駕駛員同樣需要隨時接管;前進演化成L4之後,系統隨意開,除非有極少的特殊情況才需要駕駛員介入,比如奔馳W223和威馬W6的無人泊車。比如,下面的gif圖展示的是L4自動/無人駕駛技術,是廣州企業文遠知行在這次廣州疫情防控中,使用無人駕駛車送飯到疫情隔離區。(現場實拍gif獲授權自汽車之家)
L5是沒有ODD(Operational Design Domain,設計方案運作域)的,意思是無論任何的道路狀況(車道線、道路附著系數、圍欄等)、環境(能見度、天氣等)、前方可行駛區域(收費站、施工等)等等,L5都是可以免除人類駕駛者介入的。

因為自動駕駛的研發初衷就是更加安全和便捷,L1和L2級自動駕駛輔助系統已經幫我們降低了一部份事故機率,L3目前是禍是福還不知道,因為無法形成嚴謹的邏輯閉環(人究竟還要不要全神貫註呢?),L4還沒有整車完成L4自動/無人駕駛研發的量產案例,無所不能的L5還有很遠才來。我們現在可以知道的是,L4的實作成本會非常高;我們暫時不能知道的是,整車實作L4的量產產品何時才能來臨,這需要L4系統在泊車/行駛、城市/市郊、低速/高速、國內/國外、晴空萬裏/惡劣天氣等等所有情況下都管用。關於倫理與法規的思考烏伯林根空難(Überlingen Disaster)在十多年前揭示了空中交通管制系統的處置失當將會引發何種等級的人類災難。空管員Peter Nielsen的指揮不當與光學碰撞預警系統的檢修固然是兩大緣由,但促使俄羅斯Tu-154客機與德國757貨機碰撞的另一個原因也不能被忽略:如果兩個飛行機組都按照空中防撞系統(TCAS)的提示分別進行拉高與降低,事故將不會發生;但由於俄羅斯機組「以人類命令為先」的原則,按照Nielsen的錯誤指示而非TCAS的正確指示執行,最終釀成了72人死亡的災難——最後一位是空管員Peter Nielsen,死於刺殺。

自動駕駛技術對於人類而言並非新鮮事物,我們已經堅信這項技術長達大半個世紀。若溯源的話,最早能追溯到上世紀10年代在美國誕生的第一台電動陀螺穩定裝置(自動駕駛儀的雛形)。即使60年代的阿波羅飛船已經用上了數位化自動駕駛儀,半個世紀後的俄羅斯人依然堅信人類犯錯的機率比人工智慧要小得多——歷史事實是,單單俄羅斯航空這一家公司,血手之上就有超過8200條人命,遠遠高於第二名法蘭西航空的1783名。從Autopilot一詞便可知曉,汽車工業所武裝的「自動駕駛」,技術淵源依然是航空與航天產業。我們可以用「陸上交通比空中交通復雜千萬倍」的理由去埋汰乘用車/商用車自動駕駛技術的「滯後」,卻一直不肯相信「人工智慧」一定比「人類駕駛」更加安全,即使99.9%以上的失事航班俄羅斯籍飛行員並未抱著伏特加瓶子睡著在崗位上。2005年,Google X實驗室就已開啟了谷歌無人汽車計劃(Google Driverless Car Project),2009年開始上路測試,約有23輛車分9種模型在測試。測試計畫分為自動駕駛和人為幹預的手動駕駛,行駛裏程超過320萬公裏,至2017年只造成18次事故,其中絕大多數都是被追尾(測試車極速才40km/h),無重大人員傷亡,這是第一次AI判斷出錯——320萬公裏1次車體剮蹭輕傷,不知哪位人類駕駛員敢上前邁一步接受AI的挑戰?只是,即使自動駕駛技術已經如此先進,我們還是無法把命交給AI。將AI變成Siri可以,變成小孩子的聊天機器人可以,變成咖啡廳上點心的服務員可以,但要讓我們把交通工具的控制權完全交出給AI,連方向盤、油門、制軔都摘掉,恐怕多數駕駛者暫時還不能被接受。目前,汽車工業大國們對AI造成交通事故的法律定義都是模糊的,這是一個誰都可以碰、誰都不敢碰的灰色地帶。你可以研發自動駕駛汽車,甚至美國/德國某些州的政府還讓你「合法」上路,但這並不代表合法解決事故糾紛。傳統的汽車廠商都是很保守的,一個自動駕駛計畫動輒數十億美元的成本,很有可能就會被一兩個死亡時間毀掉,而自動駕駛是不可能讓死傷機率等於0%的——雖然自動駕駛已經被認定為「比人類駕駛安全非常多」。

因為當事故主體是「人」的時候,我們可以透過制約人的社會契約來解決糾紛,法律、法規、習俗、慣例甚至情面;但當事故主體是一台會思考的「汽車」時,適用於人類的社會契約就失效了,我們可以用金錢懲罰來制裁電子程式和自動駕駛汽車的制造商,但無法用牢獄去懲罰一套電子程式。帶著未解的疑問,我們結束今天的議題。
(圖/文/攝:太平洋汽車網黃恒樂)











