作为大型仿人服务机器人Walker的产品经理,说说我的想法。
参照之于研发的意义:站在巨人的肩膀上
「If I have seen further, it is by standing on the shoulders of giants.」—— Isaac Newton
「如果说我看得比别人更远些,那是因为我站在巨人的肩膀上。」—— 牛顿
过去,在文明进化的过程中,人类明确知道自己的生理极限。人类既不能耐高温,也不能耐低温,人类无法直接感知超声和次声,无法直接感知红外线、紫外线、X射线、伽马射线......更不用说人类脑容量的局限和处理大数据的局限,还有寿命的局限、持续工作能力的局限和工作强度的局限。人类认识到自己弱鸡的事实, 于是在数千年的人类文明史中,社会进步大多依据大自然的单项能力最优物种作为参照物,比如进化链上某项素质处在尖端的物种:鹰眼、狗鼻、蝙蝠耳。为了实现飞上天的渴望,我们又参照大自然中能飞的物种,研发制造了飞机。
现在,我们参照人类自身能力:良好的移动能力和操作能力,在做仿人机器人。
双足人形机器人具有更灵活的行走能力,能适应各种地形,具备较强的越障能力,可以轻松上下楼梯,行动盲区较少……这些优点使人形机器人更能够适应未知环境,并自主完成一些工作。
站在巨人的肩膀上,创新的前提是大量了解已有成果,人类从自身去寻找最优经验的可能性是非常高的,自身就是很好的研究平台。在研发人形机器人的过程中,我们时常参照人类自身的规律找到突破点,比如说为了提高步幅和步速,我们采用仿人行走的方法去改变原来平掌着地的方式,优化步态算法。如果你细心观察的话,可以看到人落脚的时候,其实是后脚跟先找地的。

类似的例子,IHMC实验室在一篇论文里描述了波士顿动力公司Atlas机器人实现了拟人的平衡能力。
从动图中我们可以看到,Atlas的行为和人类基本无差:首先把脚轻轻地踩上去,探一下接触面的支撑点位置以及支撑力够不够,接着通过调整身体和手臂来实现平衡,从而平稳通过崎岖路面。
同样地,我们人类也参照人大脑的运行机制去制造类脑计算机,参照人类认知世界的过程去发展深度学习、强化学习……
参照人类的过程是一个不断复制人类综合能力的过程,机器人的到来就是为了替代人类去完成重复性、高危性、劳动力密集型的工作,解放双手,让人们有更多时间去享受人生和聚焦创造性的工作。
在研究机器生命化的同时,也可能达到补充、放大或加强人类某项能力的结果(生命的机器化融合),比如我们从仿人机器人的整体中抽取部分技术应用于对人的能力的扩展,通过机械手辅助肢残人士,比如仿人机器人依赖的高精度室内定位技术可移植给人使用(有兴趣可以私聊)。
当然也有一些用于机器人室内定位的技术,目前已经大量应用于工业,甚至延伸至大众化的消费应用,比如在RoboMaster赛事上用于机器人定位的UWB技术,在9月10日苹果发布的新款手机上进入普通大众的视野,基于UWB技术所提供的空间感知能力,苹果手机在应用层面的扩展将大有想象空间。

人形之于人类社会的意义:沉没成本
机器人最终需要在人类所处的现实环境中工作。 开发仿人机器人比修改整个环境显得更经济合理。
现代社会的环境是为人类自身设计的,例如,走廊的宽度、阶梯的高度、扶手的位置和门把的位置等数不胜数的事物都要适合人的尺寸和运动,这些是社会建造过程中的沉没成本。因此,当机器人具有人的形状并能像人一样活动时,就不需要为机器人而改变人的环境。
人类在社会文明活动中设计了适合自己使用的各样工具,例如驱动器、打印机、显示器、网卡、机床、点焊机、钻石镐、合成台、椅子、桌子等。椅子的形状和高矮适合于坐,桌子的高度适合于吃饭或写字,司机的座椅便于驾驶,起子或剪刀适合于手指操作。这些工具可被仿人机器人直接使用而不需要作任何修改。 而人类过去制造的工具大多功能单一,如果想要替代过去使用的大多数工具,成本之高难以想象。
而对于轮式移动机器人等非人形机器人的运动,大多数通过场景定制破解落地难,重塑多场景服务体验。
人形之于人机交互的意义:路径依赖与学习成本
如果需要为新到来的工具去改变旧有的、人类已经适用的工具,这不仅仅是经济上的沉没成本,还有人类重新培养习惯的成本和学习新工具的成本。
心理学家巴甫洛夫做过一个著名的实验:他在每次给狗送食物前打开红灯并响起铃声。这样经过一段时间以后,发现只要铃声一响或红灯一亮,不管食槽里有没有食物,狗都会开始分泌唾液。
我们现在已经很清楚这是由「条件反射」引起的。对那只狗来说,最开始分泌唾液的条件是「看见食物存在」这一基本事实。可后来,由于实验者不断地将红灯、铃声这两个不相干的事物和食物建立起强关联,狗渐渐就习惯了,在它的认知里,红灯、铃声开始和食物画上了等号。
事实上,条件反射作为一种心理机制,不仅作用于狗或人类的神经系统,也同样潜伏在我们的思维方式里。只不过,因为这种反射形成的时间比较长,往往会被我们不经意地忽略掉。
这种思维习惯,我们称之为路径依赖(Path-Dependence),又译为路径依赖性,它的特定含义是指人类社会中的技术演进或制度变迁均有类似于物理学中的惯性,即一旦进入某一路径(无论是「好」还是「坏」)就可能对这种路径产生依赖。
没有一种工具能像仿人机器人一样,综合能力强又能适应人类惯性思维,毕竟,机器人最终是要走进千家万户,与人类深度交互的,那么人因工程就显得尤为重要。而人相对来说了解自己能做什么,当一个人形的机器人在他面前的时候,不需要太多的学习,依据他旧有的对自身的理解就可以使用。比如语音交互、比如手势识别,再比如我们让机器人从冰箱里面拿出饮料给我们的时候,我们期望它分以下几步:走近冰箱,用手打开冰箱,用手拿出食物,关上冰箱。
如果完成这个任务不是由机器人来完成,而是由冰箱自动打开,机械臂递给你,那么你可能要去适应他们看起来不流畅的协作过程。或者会出现这么无奈的一个画面:你站在冰箱前不知道是冰箱先动还是机械臂先动。即使机械臂能完成大多数操作功能,能把冰箱门打开的任务也cover了,操作空间还是有限的,因为在另一个维度上机械臂是无法超越人形机器人的,那就是肢体语言。人类能从他人的肢体语言中看出来很多状态,通过简单的推理,人类就能从人形机器人的肢体语言中解读出相应的状态,如同与人类同胞相处一样。
更多的意义:开放话题
人形机器人的设计目标一直是致力于消除人和机器人在外形和行为上的区别。题主说,人类对长相越类似人类的东西,越会察觉到其与人类的细微差异,且感到不适和恐惧。
作者是在讲恐怖谷效应:
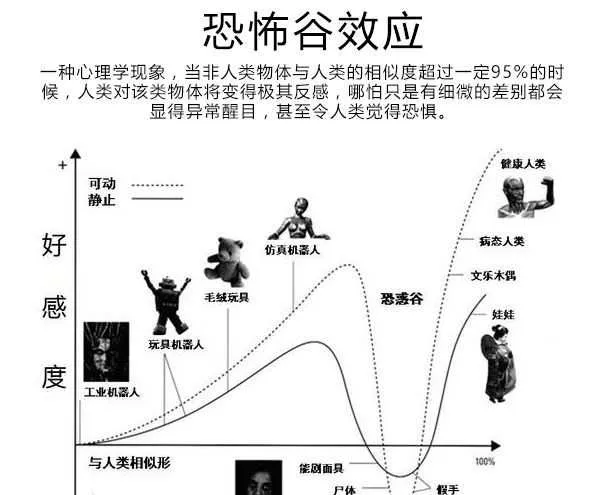
相似度这个度本身就比较难量化。我在教科书级别的论著上找到这样的描述:仿人机器人在外形和行为设计上模仿人类,具有手部、足部、头部和躯干等,是一种容易获得人类好感、亲近感并能满足情感认同的一种机器人。并且它们与人类接近程度越高,被接受和认可的程度就越高。具有人的外形是机器人成为人类伙伴并为人们带来乐趣的非常重要的因数,这个特征应该是科幻小说和电影中很多机器人都像人的主要原因。
而后,又在【发展型机器人:由人类婴儿启发的机器人】这本书上看到作者引恐怖谷理论而改编的一个图:
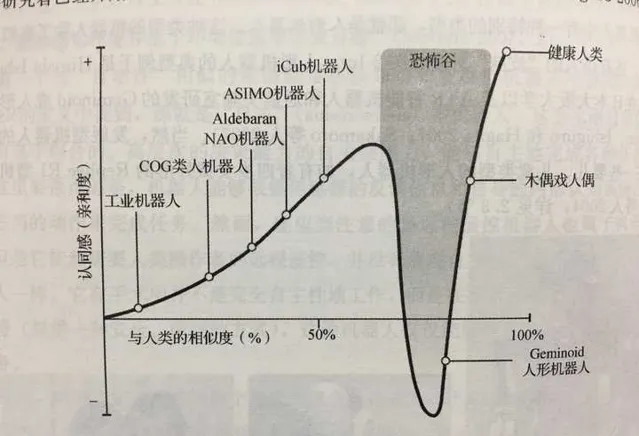
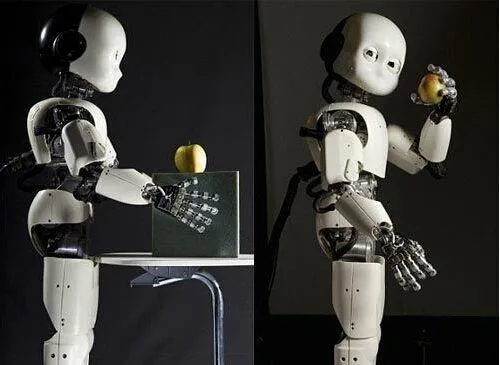
首先,这图显示iCub机器人比Asimo更像人,但是在与人类的相似度上,比木偶戏人偶还差远了。而这本书出版的时候(2016)年iCub长大概这样(私以为比木偶要智能感更强):
当试图找一下这个横轴纵轴每个机器人的排序是怎么评定的,由哪些人评定的,也就是说数据是怎么统计来的,也没在书中找到答案。与我们人形机器人首席科学家、清华大学赵明国教授聊起,他说了一个观点也蛮有趣: 恐怖谷理论也就是个理论嘛,目前认同度虽然也还比较高,但指不定哪天就会有新的理论来取代。
是的,就好比手头这本书叫【发展型机器人:由人类婴儿启发的机器人】,也是作者读博时候的研究课题developmental robotics,主要思想就是把人类儿童当作智能机器的设计模板。当然也有各种由其他事物所启发的理论,诸如此类理论,如雨后春笋。
再说恐怖谷理论是1969年被提出的,随着时代的变迁,我认为,除了与人类的相似度之外,可能需要加入更多维度的考量,比如智能感(Intelligence)和信任感(Trustworthiness)。比如在今天看来,相对于作者所列的木偶戏人偶,Asimo和iCub、以及我们会端茶倒水开瓶盖的Walker机器人分明是友好度up up的。
 Walker机器人展示服务技能
https://www.zhihu.com/video/1157654497441443840
Walker机器人展示服务技能
https://www.zhihu.com/video/1157654497441443840
随着人工智能的发展,机器人具备更强的机器视觉能力,包括视觉理解和推理,能通过机器学习识别所在场景,具备自主导航的能力,能够主动避障和自主规划出最优路径,因此能自主完成更多的任务,智能感提升;与此同时,随着社会文明的进化,人类对使用安全性和隐私的保护也越发重视,在设计上,能兼顾用户对使用安全和隐私保护的需求,会争取更多的信任感,让人能有兴趣和它成为朋友。对于机器人友好感、智能感和信任感的调研,可以看我个人公众号的一篇报告:
https:// mp.weixin.qq.com/s/vvZX kyFpJGcIg8LN9eLe-A
欢迎大家多多讨论。
优必选科技股份有限公司
研究院 产品经理 施秋鸿 Caren Sze











