过去的一年里,人形机器人(Humanoid Robot)赛道出现了爆发性的增长。其中,既有用两条腿行走的双足人形机器人,如波士顿动力 Atlas、逐际动力P1、优必选Walker S、傅利叶GR-1等;也有采用轮式底盘的轮式人形机器人,如星尘智能 S1、银河通用盖博特(Galbot)、大象机器人水星X1等。
双足还是轮式?人形机器人外形之争到底在争什么?
双足与轮式,成本差异与落地可能
人形机器人的灵巧手一般都参照人类手掌的五指造型(也有采取夹爪构型的);机械臂,也会参考人类手臂的关节与自由度;但人形机器人的下盘,到底采取何种形式?是双足还是轮式?行业却有着很持续很久的争论。
在成本上,双足是轮式底盘的多倍。
在移动速度上,双足的速度普遍较慢。宇树科技的p人形机器人移动速度为每秒3.3米,已经是双足全尺寸电驱动人形机器人的巅峰水平了。但转化为时速,也就是11.88km/h的时速,而轮式机器人一般都能够达到30km/h。
在续航上,目前人形机器人续航能力多在1.5小时-5小时区间。比如优必选Walker X显示其可续航时间是2小时,Figure01续航时间则是5小时。而轮式机器人的续航能力与移动速度都远超双足人形机器人,一般都大于5小时。
在运维上,双足人形机器人目前在生产线上普遍还需要人类辅助, 目前还无法实现工作效率上对工人1比1(一个人形机器人同一时间内工作效率能等于一位工人)的替代 。加上目前不少人形机器人还需要「拴着绳子」行走,为了保障机器人在行走过程中的安全需要投入额外的人力与物力,运维成本较高。而轮式机器人,由于稳定性问题得到解决,运维上至少不必像双足人形机器人那样投入过多资源。
从构型上,轮式当然比双足更加简单。
轮式机器人不涉及重心转移,只需要做一个移动平台即可。而双足机器人的行走是一个不断打破身体平衡的过程,人类可以依靠小脑轻松行走,但对双足人形机器人来说,需要不断调整姿态、进行关节控制,行走越快平衡也越难,一旦跌倒就容易引发任务终止或机器损坏。
在场景上,如果工作于工厂、仓库等开阔平坦且结构化的环境,轮式机器人效率远超双足机器人。但一遇到台阶或需侧身行走的狭窄角落等复杂环境,双足机器人则比轮式机器人灵活。
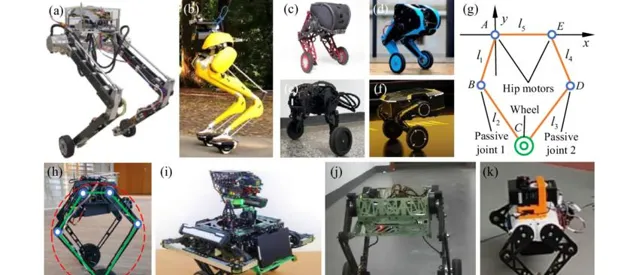
其实,在争议之外,还有部分研究者,在研究轮腿结合的机器人(Wheel-Legged Biped Robots),试图融合轮式运动的高速度、高效率和腿式运动的越障性能。
松灵在2024年初就发布了一款轮足机器人T-REX,能跑、能跳、能越障,而且目前能够实现在不同地形中⾃适应调节⾼度特性,包括平地、草地、单腿爬坡等,最高时速达到30km/h,搭配21.6v 5Ah锂电池时能保证机器人拥有60-90min的续航能力,并支持重力势能回收能量,支持电池快拆替换。
 但这也带来结构上更大的复杂性,就如同混动车比纯电车和纯燃油车更加复杂一样。
但这也带来结构上更大的复杂性,就如同混动车比纯电车和纯燃油车更加复杂一样。
轮式或双足一般只需要各自的一套动作控制系统,但轮腿结合机器人,却需要两轮动平衡控制、腿部仿生跳跃控制和轮腿一体化全身控制至少三套控制系统,更加复杂。
当然,还有一种可能,就是将双足机器人设计在一个单独的移动底盘上,在平地使用底盘,遇到障碍时则「下车」使用双足。
此外,一些场景对跨房间移动不看重的,也可以使用滑轨等固定。谷歌旗下「深层思维」公司就开发出一款乒乓球机器人,可在比赛中达到人类业余乒乓球选手的水平。研发团队在预印本网站arXiv上发文介绍,这是首个在乒乓球比赛中达到人类业余选手水平的学习型机器人智能体,其主体为一个六轴机械臂,可通过底部滑轨前后左右移动。
但仅能在滑轨上移动,人们更容易将其当做是一个普通物品而非完整的人形机器人。也就是说,人形机器人,不管其底座是基于什么构型,在普通人眼里,还是得有下半身。
还有公司在双足和轮式上双面押注。在2024年WRC世界机器人大会上,人形机器人公司UniX AI(优理奇)直接发布了两款产品——双足人形机器人Martian和轮式人形机器人Wanda。
韩国机器人公司Rainbow Robotics也发布了RB- Y1轮式机器人,RB-Y1 上的双臂都配备了七个自由度,并由一个具有六个轴的单一躯干组成,可以移动身体。该公司声称机器人可以快速加速,并通过将身体倾斜到转弯处以更高的速度转弯。为了避免在运动时翻倒,还可以通过动态改变高度来安全地控制重心。
人形机器人采用怎样的外形,还是要落地到具体场景中。如果机器人的活动场景中,没有台阶、高低不平等影响轮式机器人行进的障碍,那似乎也没有必要采用成本更高的双足设计。
如果仅仅从成本的角度,似乎轮式机器人已经胜利了?
特定场景下,双足依然不可或缺
轮式成本低、更易于在行业早期实现降本、助力更多落地的优点,但特定场景下,双足人形机器人则是必选项。
比如,在老龄化时代,老年人看护已经是刚需。在2024世界人工智能大会上,智孝工业发布的养老护理机器人「光华一号」亮相,主要功能就是把老人从床上扶起来、搀扶老人到厕所,采用了双足设计。
有些场景下,轮式机器人会因为场景限制而无法作业。比如,在汽车生产线进入车内安装零部件、检查车内细节时,轮式机器人的体积和移动方式往往显得笨拙,难以在狭小的空间中灵活操作。
人形机器人,是为了替代人类做的事,而不是为了替代人。亿欧认为,随着商业化落地的不断推进,人形机器人和工业机器人的边界甚至会越来越模糊——能够以更低成本、更高效率完成既定工作任务才是机器人的最优解。
比如矿区、能源部门的管路安装机器人、电缆卷放机器人、巷道修复机器人,这些都不具备人形,但在各自的场景中也非常适配。
如果进厂打螺丝,并不是人形机器人最合适的场景——毕竟,工业机械臂的成本更低。
那么,更适合人形机器人的场景在哪里呢?
或许还是在家庭场景。
星尘智能创始人来杰告诉亿欧,人形机器人进入普及化的价格临界点,就是具备足够全能操作性的基础上,价格降低到一辆普通小汽车的时候。
对于目前采用轮式构型,来杰也向亿欧表示,星尘智能也具备双足机器人技术,但目前双足的成本还是太高,对商业推广上不利。但未来,随着技术发展和成本的降低,不排除使用双足的可能。
银河通用创始人王鹤也认为,双腿现阶段不是最优解,徒增成本。同等身高下,两条腿的 BOM(原材料成本)比一个轮式底盘贵十倍。双手在场景落地上更有价值,而大量场景其实不需要双足运动能力,比如巡检、巡逻,机器狗和车一样能做。
王鹤在晚点的专访中指出,双足只解决了通行问题,没有操作能力。但双手能做传统机器人做不了的柔性生产,它们多是人力密集型产业里的糙活,比较容易泛化,想象空间和场景非常多,所以上半身的重要性高于下半身。当然,如果双足的成本足够低之后,「我们也会换上腿」。
双足带来的难题是很多的, 比如人类轻松做到的连续跳跃,对于双足人形机器人来说就是很难的事情,早期的双足机器人都是步履蹒跚 。
为了解决这个问题,北京通用人工智能研究院还联合乐聚(深圳)机器人技术有限公司发布人形机器人硬件系统,该系统基于质心动力学构建基于模型预测控制的优化框架,试图解决人形机器人连续跳跃的难题。据了解,该算法已经部署于乐聚的「夸父」高动态人形机器人上,展示了连续跳跃的鲁棒性。
不仅连续跳跃,甚至弯腰捡东西对双足人形机器人都是挑战。
而轮式机器人的连续移动,则是一件非常简单的事情。
总之,轮式人形机器人在移动速度、能耗、负载能力等方面更具优势,适用于规整、平坦的环境及任务重复性高的场景;而双足人形机器人在地形适应性、灵活性、交互体验等方面更占优势,适合不规则、复杂的环境以及需要高度灵活性和互动性的应用。
按照马斯克所说的第一性原理,找到每个系统中存在的那个最基本的命题,只要不违背它,那么任何改变都可以接受。那么, 将第一性原理应用于人形机器人赛道,也意味着,双臂双手要比双腿双足更重要。
在SanctuaryAI联合创始人兼CEO乔迪·罗斯看来,腿是人形机器人用手实现任务达成的移动工具,手才是人形机器人优先突破的方向。乔迪·罗斯就指出,人类工作有98%是用手指精细完成的。
从人形机器人最本质、第一性原理角度,做好双手才是根本。 但,双足也并没有被抛弃。 几乎所有做轮式机器人的企业,都没有排斥未来采用双足构型。而一旦双足技术达到临界点——那么在家庭场景中,双足大概率会成为主流。
因为家庭场景不同于工业场景,没有大面积的平坦厂房,非标化问题突出,还会面临狭窄的通道,老式楼房的上下楼,这些都需要双足机器人来实现顺利的移动。
很多网友已经畅想了在家里使用人形机器人可以做的事情:和面揉面蒸馒头,做西红柿炒鸡蛋,用电水壶烧水,水池里刷碗并把碗放好,扫地收垃圾,从洗衣机拿衣服去阳台晒好,刷鞋,把门口乱放的鞋放在鞋架上,给猫砂盆铲屎并收好垃圾,按摩等等,
而轮式人形机器人,则大概率会进入商业、工业场景,发挥在平坦地面快速移动的优点,并在双臂双手上开发出适配工商业场景的更多功能。
亿欧认为:短期来看,3-5年内,轮式依然是人形机器人商业落地的主要形式。长期看,随着双足结构的成本下降,以及可快速换电缓解续航问题,双足人形机器人的市场规模预计可以与轮式相颉颃。
从中长期看,混合解决方案将会成为各家接下来发力的重点。据亿欧了解,目前的多家轮式人形机器人也同时在投入对双足的前期研发,而双足机器人更改构型,研发一个移动式底盘也并非难事。 我们预测,未来会有更多人形机器人企业同时推出双足与轮式的构型,在特定场景下提供更具针对性的解决方案。











