作為大型仿人服務機器人Walker的產品經理,說說我的想法。
參照之於研發的意義:站在巨人的肩膀上
「If I have seen further, it is by standing on the shoulders of giants.」—— Isaac Newton
「如果說我看得比別人更遠些,那是因為我站在巨人的肩膀上。」—— 牛頓
過去,在文明前進演化的過程中,人類明確知道自己的生理極限。人類既不能耐高溫,也不能耐低溫,人類無法直接感知超聲和次聲,無法直接感知紅外線、紫外線、X射線、Gamma射線......更不用說人類腦容量的局限和處理大數據的局限,還有壽命的局限、持續工作能力的局限和工作強度的局限。人類認識到自己弱雞的事實, 於是在數千年的人類文明史中,社會進步大多依據大自然的單項能力最優物種作為參照物,比如前進演化鏈上某項素質處在尖端的物種:鷹眼、狗鼻、蝙蝠耳。為了實作飛上天的渴望,我們又參照大自然中能飛的物種,研發制造了飛機。
現在,我們參照人類自身能力:良好的移動能力和操作能力,在做仿人機器人。
雙足人形機器人具有更靈活的行走能力,能適應各種地形,具備較強的越障能力,可以輕松上下樓梯,行動盲區較少……這些優點使人形機器人更能夠適應未知環境,並自主完成一些工作。
站在巨人的肩膀上,創新的前提是大量了解已有成果,人類從自身去尋找最優經驗的可能性是非常高的,自身就是很好的研究平台。在研發人形機器人的過程中,我們時常參照人類自身的規律找到突破點,比如說為了提高步幅和步速,我們采用仿人行走的方法去改變原來平掌著地的方式,最佳化步態演算法。如果你細心觀察的話,可以看到人落腳的時候,其實是後腳跟先找地的。

類似的例子,IHMC實驗室在一篇論文裏描述了波士頓動力公司Atlas機器人實作了擬人的平衡能力。
從動圖中我們可以看到,Atlas的行為和人類基本無差:首先把腳輕輕地踩上去,探一下接觸面的支撐點位置以及支撐力夠不夠,接著透過調整身體和手臂來實作平衡,從而平穩透過崎嶇路面。
同樣地,我們人類也參照人大腦的執行機制去制造類腦電腦,參照人類認知世界的過程去發展深度學習、強化學習……
參照人類的過程是一個不斷復制人類綜合能力的過程,機器人的到來就是為了替代人類去完成重復性、高危性、勞動力密集型的工作,解放雙手,讓人們有更多時間去享受人生和聚焦創造性的工作。
在研究機器生命化的同時,也可能達到補充、放大或加強人類某項能力的結果(生命的機器化融合),比如我們從仿人機器人的整體中抽取部份技術套用於對人的能力的擴充套件,透過機械手輔助肢殘人士,比如仿人機器人依賴的高精度室內定位技術可移植給人使用(有興趣可以私聊)。
當然也有一些用於機器人室內定位的技術,目前已經大量套用於工業,甚至延伸至大眾化的消費套用,比如在RoboMaster賽事上用於機器人定位的UWB技術,在9月10日蘋果釋出的新款手機上進入普通大眾的視野,基於UWB技術所提供的空間感知能力,蘋果手機在套用層面的擴充套件將大有想象空間。

人形之於人類社會的意義:沈沒成本
機器人最終需要在人類所處的現實環境中工作。 開發仿人機器人比修改整個環境顯得更經濟合理。
現代社會的環境是為人類自身設計的,例如,走廊的寬度、階梯的高度、扶手的位置和門把的位置等數不勝數的事物都要適合人的尺寸和運動,這些是社會建造過程中的沈沒成本。因此,當機器人具有人的形狀並能像人一樣活動時,就不需要為機器人而改變人的環境。
人類在社會文明活動中設計了適合自己使用的各樣工具,例如驅動器、印表機、顯視器、網卡、機床、點焊機、鉆石鎬、合成台、椅子、桌子等。椅子的形狀和高矮適合於坐,桌子的高度適合於吃飯或寫字,司機的座椅便於駕駛,起子或剪刀適合於手指操作。這些工具可被仿人機器人直接使用而不需要作任何修改。 而人類過去制造的工具大多功能單一,如果想要替代過去使用的大多數工具,成本之高難以想象。
而對於輪式移動機器人等非人形機器人的運動,大多數透過場景客製破解落地難,重塑多場景服務體驗。
人形之於人機互動的意義:路徑依賴與學習成本
如果需要為新到來的工具去改變舊有的、人類已經適用的工具,這不僅僅是經濟上的沈沒成本,還有人類重新培養習慣的成本和學習新工具的成本。
心理學家巴甫洛夫做過一個著名的實驗:他在每次給狗送食物前開啟紅燈並響起鈴聲。這樣經過一段時間以後,發現只要鈴聲一響或紅燈一亮,不管食槽裏有沒有食物,狗都會開始分泌唾液。
我們現在已經很清楚這是由「條件反射」引起的。對那只狗來說,最開始分泌唾液的條件是「看見食物存在」這一基本事實。可後來,由於實驗者不斷地將紅燈、鈴聲這兩個不相幹的事物和食物建立起強關聯,狗漸漸就習慣了,在它的認知裏,紅燈、鈴聲開始和食物畫上了等號。
事實上,條件反射作為一種心理機制,不僅作用於狗或人類的神經系統,也同樣潛伏在我們的思維方式裏。只不過,因為這種反射形成的時間比較長,往往會被我們不經意地忽略掉。
這種思維習慣,我們稱之為路徑依賴(Path-Dependence),又譯為路徑依賴性,它的特定含義是指人類社會中的技術演進或制度變遷均有類似於物理學中的慣性,即一旦進入某一路徑(無論是「好」還是「壞」)就可能對這種路徑產生依賴。
沒有一種工具能像仿人機器人一樣,綜合能力強又能適應人類慣性思維,畢竟,機器人最終是要走進千家萬戶,與人類深度互動的,那麽人因工程就顯得尤為重要。而人相對來說了解自己能做什麽,當一個人形的機器人在他面前的時候,不需要太多的學習,依據他舊有的對自身的理解就可以使用。比如語音互動、比如手勢辨識,再比如我們讓機器人從冰箱裏面拿出飲料給我們的時候,我們期望它分以下幾步:走近冰箱,用手開啟冰箱,用手拿出食物,關上冰箱。
如果完成這個任務不是由機器人來完成,而是由冰箱自動開啟,機械臂遞給你,那麽你可能要去適應他們看起來不流暢的協作過程。或者會出現這麽無奈的一個畫面:你站在冰箱前不知道是冰箱先動還是機械臂先動。即使機械臂能完成大多數操作功能,能把冰箱門開啟的任務也cover了,操作空間還是有限的,因為在另一個維度上機械臂是無法超越人形機器人的,那就是肢體語言。人類能從他人的肢體語言中看出來很多狀態,透過簡單的推理,人類就能從人形機器人的肢體語言中解讀出相應的狀態,如同與人類同胞相處一樣。
更多的意義:開放話題
人形機器人的設計目標一直是致力於消除人和機器人在外形和行為上的區別。題主說,人類對長相越類似人類的東西,越會察覺到其與人類的細微差異,且感到不適和恐懼。
作者是在講恐怖谷效應:
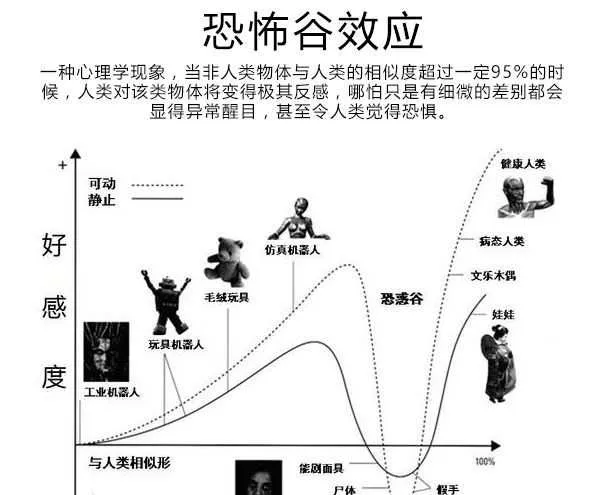
相似度這個度本身就比較難量化。我在教科書級別的論著上找到這樣的描述:仿人機器人在外形和行為設計上模仿人類,具有手部、足部、頭部和軀幹等,是一種容易獲得人類好感、親近感並能滿足情感認同的一種機器人。並且它們與人類接近程度越高,被接受和認可的程度就越高。具有人的外形是機器人成為人類夥伴並為人們帶來樂趣的非常重要的因數,這個特征應該是科幻小說和電影中很多機器人都像人的主要原因。
而後,又在【發展型機器人:由人類嬰兒啟發的機器人】這本書上看到作者引恐怖谷理論而改編的一個圖:
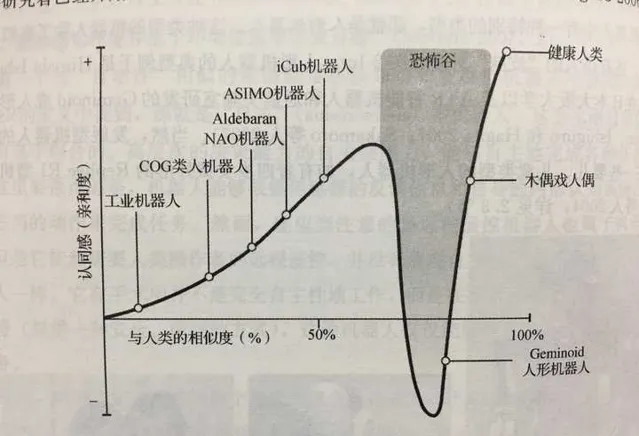
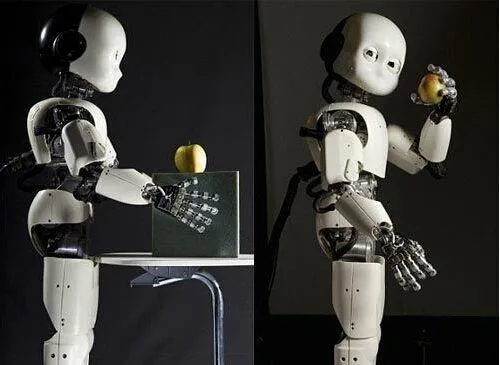
首先,這圖顯示iCub機器人比Asimo更像人,但是在與人類的相似度上,比木偶戲人偶還差遠了。而這本書出版的時候(2016)年iCub長大概這樣(私以為比木偶要智能感更強):
當試圖找一下這個橫軸縱軸每個機器人的排序是怎麽評定的,由哪些人評定的,也就是說數據是怎麽統計來的,也沒在書中找到答案。與我們人形機器人首席科學家、清華大學趙明國教授聊起,他說了一個觀點也蠻有趣: 恐怖谷理論也就是個理論嘛,目前認同度雖然也還比較高,但指不定哪天就會有新的理論來取代。
是的,就好比手頭這本書叫【發展型機器人:由人類嬰兒啟發的機器人】,也是作者讀博時候的研究課題developmental robotics,主要思想就是把人類兒童當作智能機器的設計樣版。當然也有各種由其他事物所啟發的理論,諸如此類理論,如雨後春筍。
再說恐怖谷理論是1969年被提出的,隨著時代的變遷,我認為,除了與人類的相似度之外,可能需要加入更多維度的考量,比如智能感(Intelligence)和信任感(Trustworthiness)。比如在今天看來,相對於作者所列的木偶戲人偶,Asimo和iCub、以及我們會端茶倒水開瓶蓋的Walker機器人分明是友好度up up的。
 Walker機器人展示服務技能
https://www.zhihu.com/video/1157654497441443840
Walker機器人展示服務技能
https://www.zhihu.com/video/1157654497441443840
隨著人工智能的發展,機器人具備更強的機器視覺能力,包括視覺理解和推理,能透過機器學習辨識所在場景,具備自主導航的能力,能夠主動避障和自主規劃出最優路徑,因此能自主完成更多的任務,智能感提升;與此同時,隨著社會文明的前進演化,人類對使用安全性和私密的保護也越發重視,在設計上,能兼顧使用者對使用安全和私密保護的需求,會爭取更多的信任感,讓人能有興趣和它成為朋友。對於機器人友好感、智能感和信任感的調研,可以看我個人公眾號的一篇報告:
https:// mp.weixin.qq.com/s/vvZX kyFpJGcIg8LN9eLe-A
歡迎大家多多討論。
優必選科技股份有限公司
研究院 產品經理 施秋鴻 Caren Sze











