
車東西(公眾號:chedongxi)
作者 | Juice
編輯 | 曉寒
就在今年4月份,由車東西和2021上海車展承辦方上海市國際展覽有限公司(SIEC)聯合主辦的「GTIC 2021全球自動駕駛創新峰會」在上海成功舉辦。
峰會受到了全國各地趕來的自動駕駛工程師、創業者、投資人的熱情支持,會場全天座無虛席,全網觀看直播的人數高達243萬人。

峰會現場
互聯網巨頭百度、滴滴、美團同台演講,從無人出租車、低速配送車和輔助自動駕駛方面講解了自動駕駛的落地問題;明星創企小馬智行、文遠知行、蘑菇車聯、元戎啟行等也分享了自己在無人駕駛出租車和車路協同方面的思考。
福瑞泰克、馭勢科技、MAXIEYE則分享了L2級自動駕駛量產落地方面的進展;智加科技、嬴徹科技和希迪智駕從商用車自動化方面出發,分析了對於無人駕駛重卡和無人礦卡的布局情況。
理想汽車從主機廠的角度分享了自己對於自動駕駛的思考,高通、地平線、黑芝麻智能、超星未來等企業也分享了其車載AI芯片、車載軟件和演算法方面的心得。
本屆峰會上,西安交通大學薛建儒教授則從學術研究角度全面剖析了無人車行業的概況和所面臨的一些關鍵問題,並行表了題為【無人車的場景理解與情境預測】的學術報告。
薛教授演講現場
薛建儒表示目前無人車主要有兩條技術路線,分別是自主駕駛和車路協同,而隨著5G技術的發展和大面積普及,已經開始呈現出深度融合的發展趨勢。
現階段,全球多個國家都在做自動駕駛的研究,而薛教授則從2002年就開始研究自動駕駛了。2009年開始國家自然科學基金委啟動了認知資訊計算重大研究計劃,選擇無人車作為物理載體來驗證視聽覺資訊計算模型的有效性,每年舉辦一次比賽。
薛教授的團隊也連續參加了多屆比賽,透過大量的參賽經驗,薛教授認為感知與理解交通場景是無人車所面臨的最主要問題之一,其技術發展可大致分為交通場景理解和駕駛情景預測兩個階段。
交通場景的感知與理解就是要無人車理解自己所處的環境,需要透過多傳感器協同構建交通場景的層次化表征,以滿足無人車自主運動決策的需求。而要想讓無人車更好地駕駛,交通情境的預測必不可少,薛教授的團隊目前已經實作了4秒後行人運動軌跡的預測。
但盡管如此,薛教授還認為目前無人車交通場景還有四個挑戰性的問題,分別為廣域環境下的自主定位、長時間的情境預測、自主與人機協同、車路協同。如果能夠順利解決這些問題,國內無人駕駛的研究也將會更進一步。
以下為薛建儒教授的演講幹貨。
一、單車智能和車路協同趨於融合 完全無人駕駛仍存難度
薛建儒教授說到,智能駕駛要求車輛能夠自主適應環境、自主運動。越來越多的自主套用系統不斷湧現,而無人車是一個非常典型的自主套用系統,也是國家新一代人工智能發展規劃裏重點的突破方向。

薛教授演講現場
無人車的技術路線方面主要有兩條,一是透過單車智能實作自主駕駛,透過車輛配置的傳感器以及規劃和控制來實作自適應環境的調整;另外一條則是車路協同,即透過聯網通訊,使得車與車之間、車和交通設施之間的互聯互通資訊來降低感知以及決策的技術難度。
薛教授表示,隨著5G技術的發展和大面積普及,這兩條技術路線正在呈現出深度融合的發展趨勢。
目前,無人駕駛企業做的最多的還主要是單車智能這條路線,在這條技術路線上,L3級~L5級自動駕駛之間還存在著技術鴻溝。
但是這種情況也有所緩解,尤其是去年Waymo釋出完全取消安全員無人車的測試,展示了L4級、L5級自動駕駛商業套用的可能性。
而在中國,近些年也出現了大面積的自動駕駛測試,而這種大面積的測試,也出現了一些典型的事故。這說明,實作真正安全、可信的無人駕駛的挑戰性仍然存在,而且非常巨大。
判斷一輛車是否具有智能性,要從車輛的行為去看,而車輛的行為則取決於車輛的決策。但對於自動駕駛車輛來說,其駕駛決策是一個動態的決策,存在復雜性、不確定性和歧義性。
復雜性是說測試收集到的數據是大量的,並且存在冗余關系,如何從紛繁復雜的冗余關系當中找出因果關系,實作推理正是其復雜性所在;存在不確定性是因為測試環境是開放的環境,不像取得巨大進步的AlphaGo只面臨封閉狀態就可以;歧義性主要是因為車輛從數據裏面得到的很多判斷是有沖突的,而消解這些沖突,得到合理安全可信的解釋還比較復雜。
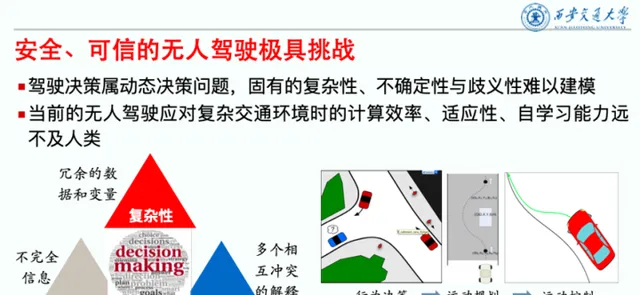
薛教授演講PPT
因此來看,現階段無人車所依賴的行為決策、運動規劃和運動控制等術語模型表征能力仍然不足,沒有辦法像人應對復雜交通環境時所具有的效率、適應力和自主學習能力。
目前,國家也正在推動自動駕駛的發展。在2009年,國家自然科學基金委啟動了認知資訊計算重大研究計劃,選擇無人車作為物理載體來驗證視聽覺資訊計算模型的有效性,每年舉辦一次比賽。這個比賽裏有大量的參賽團隊,為國家培養了大批自動駕駛人才。
從2017年開始,這項比賽的場景主要分為兩個,一是城市環境,另一個則是高速環境,這兩個環境主要用來驗證車輛能不能適應真實的車流。從實驗結果上來看,目前的自動駕駛車輛表現還不錯。
二、交通場景理解是關鍵 無 GPS 也能成功定位
薛教授把對交通場景的理解劃分成了兩個階段,第一個階段是交通場景的理解,第二個階段駕駛情境的預測。
薛教授也介紹了自己團隊在交通場景理解方面所做的工作和思考,他認為對交通場景的理解需要多傳感器的協同來構建交通場景的層次化表征,而且這個層次化表征必須滿足無人車自己運動決策的需求。
從無人車自動運動決策的需求來看,它主要需要的資訊是幾何度量、拓撲、運動規則、語意推理,從傳感器的數據出發提取滿足自主決策所需要的三個層次的資訊。
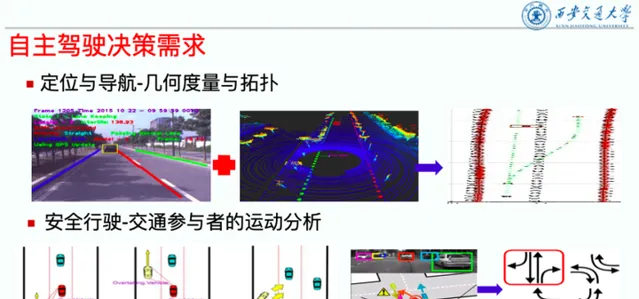
薛教授演講PPT
計算的角度可以劃分成三個層級,初級為了滿足度量和定位,也就是說為了滿足定位和導航;中級則是對環境裏面的運動物體進行分類,推測它們對場景的占據情況,來實作決策;高級則需要預測場景的變化,要對交通的情形進行認知和理解,支撐更高層級更高智能水平的駕駛決策。
而要實作這樣的表征,就需要輸入傳感器數據,包括GPS和地圖資訊,並轉化為對車輛的方向盤、油門、方向和速度的控制。
場景理解需要實作自主定位以及對周圍障礙物的運動分析。自主定位可以分成兩個範圍,一個是相對定位,也就是要在距離出發點車輛行駛過程中每個時刻的位置狀態,另外一個是絕對定位,透過高精度地圖實作。
自主定位不僅僅在無人車裏面,在機器人領域裏面也是一個長期都在研究的問題。目前主要的技術路線如何利用環境的傳感器和對車輛狀態感知的慣性測量單元融合在一起,實作自主定位。這種自主定位技術路線可以劃分成兩條,一種松耦合,一種緊耦合。
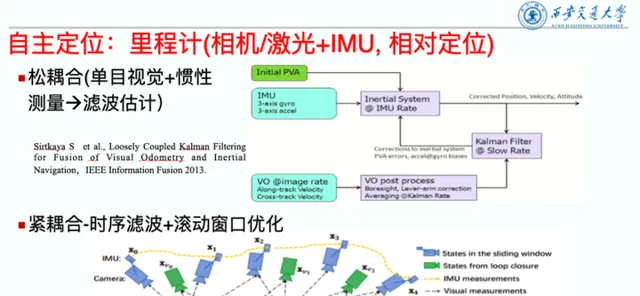
薛教授演講PPT
所謂的松耦合,透過環境感知器來實作一個裏程計,透過慣性測量單元實作一個裏程計,兩個融合,實作最終的可靠定位。緊耦合就是在數據層次上考慮兩個數據之間的互助交叉驗證等等關系,把慣性測量引入到環境感知數據的推理裏面來,主要的技術在持續力波框架下增加了捲動視窗的最佳化。
現在隨著技術的發展,尤其是擴充套件濾波器技術,可以透過定義不同的狀態,讓狀態包含更多的資訊,以及對IMU數據處理的速度還有後端的最佳化濾波框架逐漸發展一個圖來做最佳化,也就是在鞏固視窗裏面集中更多的測量數據,來測量車輛的位置。
而絕對定位則是地圖,對環境的表征就是用地圖來表示的,那麽做地圖的時候,首先需要對什麽做出表征呢?
目前的情況是對環境三維模型的表征,要對場景車輛行駛的環境實作全覆蓋,每個位置都有一個三維的柵格來表示是占據還是不占據,從度量和定位的角度來出發,後期的發展不僅實作定位,而且要支撐無人車適應環境的環境變化自適應,還需要更多嵌入拓撲資訊以及語意資訊。
而且透過裏程計和回環檢測和因子圖最佳化技術結合到一起,還可以構建三維點雲地圖生成的演算法。這個演算法實作大的範圍裏面點雲模型的構建,實際就是環境表征,某一個部份放大以後可以看到,它是一個三維表征,比如西安交通大學四大發明廣場裏面的雕塑外形可以在地圖裏面拍出來。
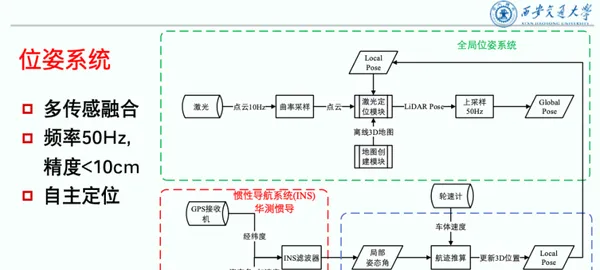
這不僅僅可以實作度量,還有一個拓撲資訊,薛教授團隊會把車道線資訊和度量資訊結合起來。車道線地圖建立要解決的問題就是局部的測量之間的時空對齊,這方面薛教授團隊也做了一些研究工作,在建立三維點雲地圖的時候,同時把車道線的地圖也建立起來,形成度量和拓撲混合的地圖。下一步的工作主要考慮把位置資訊、對任務相關的一些重要資訊整合到地圖裏面來。
而位姿系統實作了50赫茲到厘米級的定位精度,沒有GPS的情況下也可以實作自主定位。2019年的時候,薛教授等人在中國智能車未來挑戰賽裏面提出來不依賴GPS完成城區和高速的比賽。
薛教授演講PPT
整個挑戰賽裏面不僅有城區交通公路,還有鄉村越野路,包括要完成從地下車庫進去和自主泊車再出來的工作。這對於自主定位的時效性,以及自主定位的範圍之廣和時長都是一個嚴峻的挑戰。但最終,團隊的表現效果還不錯。
三、情境檢測也是重點 自動駕駛還存四大挑戰
除了對服務於車輛的定位和導航的靜態場景進行理解,車輛還要遵守交通規則,也就是說,車輛還需要對車道線、道路邊界和紅綠燈進行檢測。
目前所有的障礙物運動分析都是從檢測、跟蹤和預測開始的,尤其是預測這件事情現在變得越來越重要。支撐車輛運動決策,運動規劃都是建立在預測的基礎上,所以研究的時候必須要根據當前時刻障礙物的狀態預測將來這些障礙物的占據情況。

薛教授演講現場
預測的時間越長,難度就越大,這不僅會涉及到跟蹤,而且對障礙物的行為要進行辨識,運動異同進行判斷。
薛教授團隊做的比較多的就是三維障礙物的檢測,透過立體視覺或者三維激光,把三維點雲和障礙物的資訊,如位置和速度提取出來,進一步把三維形狀重建出來,就能提高研究者對車輛運動速度的掌握。
車輛在運動過程中可能只有局部,但要估計準確的速度,就需要知道完整的三維形狀圖,如果找不到在時間上的對應點,速度就無法計算出來。因此,研究者要對車輛進行長期的跟蹤,預測移動行為,最終決定無人車什麽時候插入車流,什麽時候離開。
薛教授演講PPT
但是一個比較明顯的事情就是,無論用視覺還是激光或者是激光和視覺融合的方案,三維障礙物檢測的準確率均沒有超過90%,這也就意味著在這樣的基礎上要實作障礙物的運動分析有很多的歧義性。
為了解決這一問題,薛教授的團隊也做了很多工作,把幾何和物理關系的表征模型引入到檢測跟蹤和預測裏面來,而不是把障礙物的運動分析分解為單獨的檢測跟蹤或者預測。對於場景裏面交通要素之間的關系時空變化看作一個整體,提高障礙物的檢測、跟蹤和預測路線。
隨著套用的深入也開始發現更多的問題,此前采用對各個子問題的表征和計算的方法,相對駕駛任務而言並非是最優的。現在薛教授的團隊直接開始預測參與實體間的拓撲關系的時空變化,這種關系的變化主要包括為它們之間的因果關聯以及控制關系,而且對這個關系的預測準確度是形成準確駕駛策略的基礎。
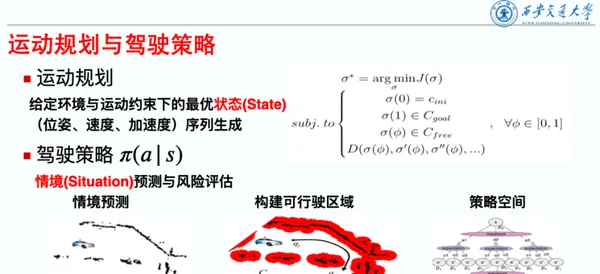
駕駛策略需要建立在預測的基礎上,而且預測應該是對場景裏面各個交通參與者時空關系的預測。
更進一步來看,在駕駛策略方面,研究者不僅僅需要將無人車的狀態和環境的變化關聯在一起,而且需要將其定義為一個情境,然後對情境進行預測。
薛教授認為,目前在傳感器的數據處理方面已經有了大量的研究,包括在深度神經網絡裏面對記憶和註意的研究,把摺積神經網絡裏面的權重看作是訓練集裏面的樣本和類別之間的對應關系。
對RNN(迴圈神經網絡)這樣的網絡來講,記憶體現在對類比狀態的描述上,透過對於從屬控制的讀寫來實作長時間的記憶。對傳統的RNN網絡改造,現有的RNN網絡對於輸入的數據沒有區分性,輸入是一個向量,而整個向量裏面的各個元素是統一來處理的。
薛教授團隊在這裏引入了一個元素重要性的概念,而這個重要性透過一個門控單元實作元素重要性的調整,同時也給RNN神經原裏面賦予了細粒度的註意力,對於RNN網絡來講,對於動作的辨識有了明顯的提升。
動作的辨識在無人車研究裏主要指一個對外界環境裏面行人的動作辨識,例如行人到底過馬路還是不過馬路,在人機共駕的情況下,對駕駛員的操作也非常重要,是一個通用性的指標。
薛教授團隊提出來視角自適應的辨識,比現有的方法都好一些,經過了大量的試驗數據,現在也得到了大量的套用。
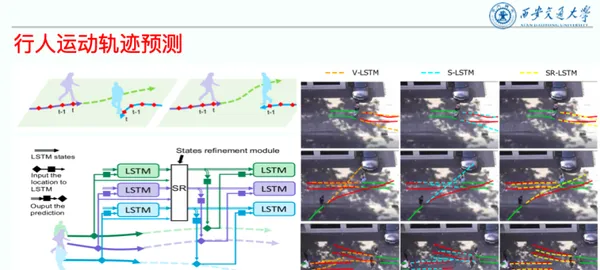
另外,行人運動軌跡的預測對於在城區裏面的無人車來講也是非常關鍵的問題,此前研究者在做預測的時候往往對單個人的運動進行預測,主要考慮人與人之間的相互作用關系。而薛教授團隊則增加了社會互動的關系,透過一個SR單元,可以顯著提升對行人軌跡預測的準確度,目前可以預測4秒鐘以內的行人軌跡。
薛教授演講PPT
而且薛教授團隊還對運動的數據集、三維形狀、運動軌跡、互動的事件等都做了標註,這對於地圖模型的設計和測試帶來了很大方便。
但盡管如此,薛教授還認為,目前無人車方面還存在四個挑戰性的問題。
一是廣域環境下的自主定位。如何在衛星不可用的情況下高精導航,這是中國科協2020年釋出的10個對技術和產業具有關鍵作用的工程難題第七個。
二是長時間的情境預測。各個交通主體之間的時空關系是怎麽來演化的,從而來決定預測。常識的交通駕駛預測仍然是挑戰性的問題。
三是自主與人機協同。無人車依然離不開人,無論是遠端的還是安全員,如何實作超越人類駕駛水平的自主運動預測,這仍然是一個開放的問題,是一個挑戰性的問題。
四是車路協同。在5G網絡的情況下,尤其交通設施雲邊端架構如何來分配任務,如何來促進自動駕駛的技術發展,這也是中國科協對科學發展具有導向作用的科學問題的第六個。
結語:自動駕駛發展迅速但還面臨多重難題
從谷歌讓無人駕駛汽車走入公眾視野之後,自動駕駛行業在短短的十余年間已經取得了跨越式的發展,無人駕駛出租車開始落地,甚至都已經逐步開始拿掉了安全員。
而自動駕駛技術也從單車智能逐步過渡到單車智能和車路協同融合,在技術上也取得了大跨步的發展。
不過還需要註意的是,雖然技術已經取得了不斷的發展,但是目前技術的發展已經走過了快速增長期,現階段面臨著諸多瓶頸,只有打破這些瓶頸,完全無人駕駛時代才能真正到來。










