2023年初,新勢力車企們紛紛調高了2025年的銷量目標,決策基礎之一就是智能化技術呈現「強者愈強」的特征。若銷量不達到一定的銷量規模,就有可能被遠遠拋下,再也追不上。
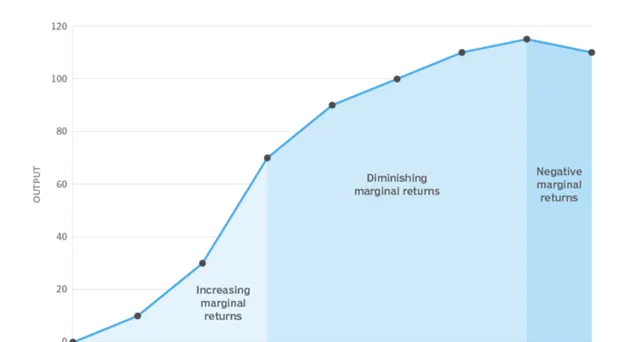
什麽是「強者愈強」的特征? 聊到這個話題,我們可以回顧一下汽車技術發展史:絕大部份技術的成長特征都是「邊際效應遞減」的 —— 初期投入會帶來技術的飛速增長,中後期的相同投入要獲得收益則越來越難!
目前的發動機熱效率、芯片制程工藝都呈現了「邊際效應遞減」的特征,為後來者追趕提供了機遇,這也就是所謂的「後發優勢」。
特別是傳統豪華品牌,歷經百年滄桑從來不懼怕什麽新技術崛起 —— 他們認為,新技術嘛,最多慢個兩三年,技術差異總是能夠抹平,只有豪華品牌的文化內涵和它帶給消費者的向往感,才是永恒不變的!
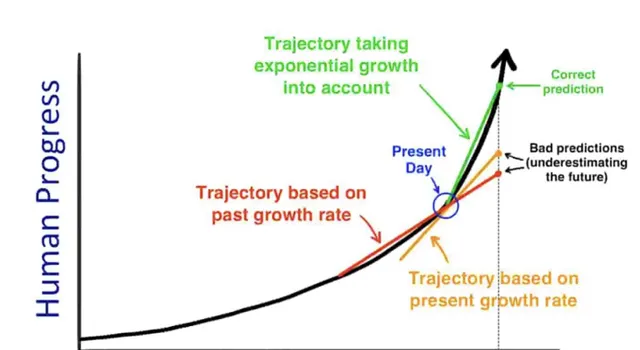
然而,智能技術的崛起卻讓他們產生了一些擔憂,因為 這項技術呈現「強者愈強」的特征 —— 一旦跨越了「技術奇異點」(Technological Singularity),後發者可能就再也追不上了 !
基於此理論,就有人提出一個觀點: 新勢力在造車技術上落遜於傳統車企,但在智能技術上具備領先優勢(這也是他們的賣點),那麽傳統車企再也追不上新勢力了嗎?
我十分認同「技術奇異點」理論,也承認智能技術領域傳統車企平均水平落後於新勢力,但並不認為傳統車企會一直落後。做出這個論斷基於兩個論點: 一是大家都還未抵達「技術奇異點」時刻,二是到達技術奇異點的關鍵因素並不是早出發,而是智能技術的系統化投入 。
最近參加了@趙奕 老師Autolab的一次智駕大橫評欄目,我被分配到試駕一輛傳統車型魏版藍山DHT-PHEV,Autolab白楊同學試駕一輛蔚來ES6。我們從上海開460公裏到達合肥,這個行程非常,讓我們也有機會深度體驗這款車。


在這個過程中,我對傳統車企的智駕與智艙技術也有了新的體驗,借此機會向大家匯報一下,同時以此案例來論述我關於「技術奇異點」的兩個論點。

一、魏牌藍山NOH體驗
這次魏牌藍山DHT-PHEV的NOH與全新ES6的NOP+對比試駕,我本來是覺得毫無懸念。畢竟,蔚來的NOP+是我心目中高速領航輔助駕駛的三強之一(另兩個是華為系與小鵬),它的技術雖然不是研發最快的,但在註重使用者體驗上特別有一套。
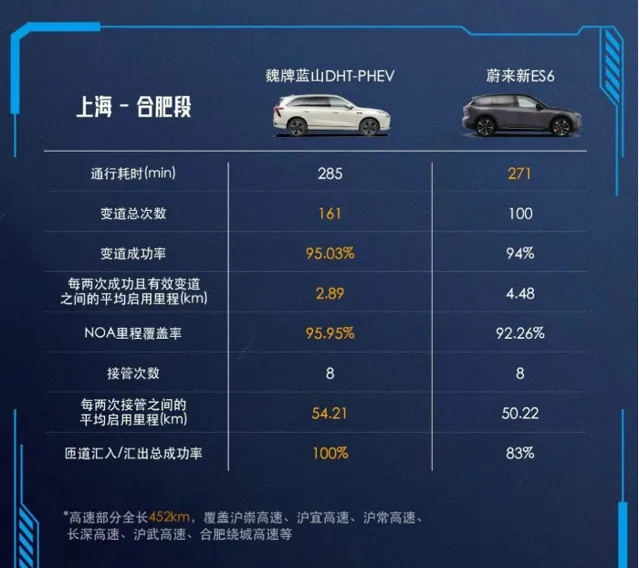
至於魏牌NOH,相信大部份人都沒聽說過吧? 按照傳統車企的平均水平來估計,出發之前我預計它的NOH表現,宏觀來看會在通行效率、變道成功率、變道次數等統計數據上落敗,微觀上會在駕駛體感方面顯得笨拙。

沒想到的是,我大大低估了魏牌NOH的實力: 在Autolab的統計數據中,藍山的變道次數、變道成功率、裏程覆蓋率、匝道成功率等方面優於蔚來ES6。當然蔚來ES6作為老將實力也不虛,它在通行效率上領先藍山5%左右。 個人認為主要原因是魏牌NOH最多只能將巡航速度設定為120km/h,而蔚來可以設定為130km/h。
統計數據反映的是宏觀情況,更重要的是體驗細節。我的細節體驗很多,僅分享兩個最大的體驗:
1. 無圖HWA也能變道超車
熟悉高速領航輔助駕駛功能的朋友都知道,開啟此功能的前提是高精度地圖覆蓋。 大部份車型到了沒高精度地圖的區域,功能就會降級為LCC車道居中,喪失了變道超車的能力。 如果此時恰好要出匝道,措不及防的使用者就有可能會開錯路。甚至有一些車型,功能直接降級為ACC,連車道保持的能力都沒有了。
遇到無高精地圖覆蓋的區域時,魏牌NOH功能會降級為HWA高速自動駕駛輔助系統。讓我驚訝的是,藍山DHT-PHEV在HWA功能下依然可以變道超車,與NOH的體驗差異微乎其微。可以想像的是,將來無圖功能的套用場景會進一步擴大。
當前發展得如火如荼的智駕技術領域,行業越來越強調「體驗一致性」,例如城區智駕與高架路/高速智駕的無縫銜接。魏牌NOH與HWA兩個功能也做到了高速場景的無縫銜接,這在行業裏我還是第一次見到。
後來了解到,魏牌NOH與HWA之所以能做到這一點,是與 DriveGPT大模型與MANA雪湖體系 支撐的智駕架構息息相關 —— 這兩點實際上與「技術奇異點」的關系密切,稍後再做深入討論。
2. 變道靈活,策略多變
試駕魏牌智駕的第二個體驗,就是它的變道特別靈活,每次變道時對前後車距離、車速的控制也非常多變,比較像人類司機。有時候變道積極性甚至有點過高了,到了隔壁車道發生還不如原車道,就再變回來(這一點應該在後續最佳化)。
整個體驗下來,你會覺得魏牌NOH還有不少可以改進的地方,但必須承認它的底子非常好!這種感覺,就像南海鱷神第一次見到段譽,雖然那時候段譽的武功還比較弱,但被摸了一下後腦勺之後就知道這是一位武學巫師,上限極高。
這聽起來有點玄乎,但我並沒有在瞎說。如果你體驗過老一代的高速領航輔助駕駛功能就會知道,它的超車時機、超車時的距離控制、超車時的速度變化,都有著明顯的規律,就像好學生做作業一樣,做得規規整整。由於太過規整,當它面對復雜多變的真實交通狀況時,就會做出和人類司機不同的決策,讓使用者感覺它時而過於保守、時而又會做出愚蠢而冒險的舉動。
與之相對的,魏牌NOH的表現則比較像人類司機,每次超車變道都比較靈活多變,又很自然。後來了解到,它能做到這一點,也是與 DriveGPT大模型與MANA雪湖體系 支撐的智駕架構關系密切。
二、「Coffes OS 2」的語音互動體驗
說實話,試駕開始的前200公裏我都沒使用語音互動功能,一是因為當日的體驗重點在於智駕而不是智艙,二是因為我曾經體驗過多家傳統車企的語音互動功能,那記憶相當慘痛 —— 最初覺得對方是一個傻瓜,後來覺得強行使用此功能的自己是個傻瓜。
試駕過半,有一段路下起了暴雨,此時我邊開車邊操作車機確實很危險。迫不得已,我就喊了一句「你好小魏」。沒想到的是,話音剛落它就回應了,甚至讓我感覺有些猝不及防!
本以為這是一次偶然情況,後來試了一路,每次小魏的響應都非常快! 我甚至想建議產品經理可以改慢一點,因為兩個人類對話的時候根本不會反應這麽快,小魏總是反應這麽快,讓我覺得自己老了、反應遲鈍了!
不僅響應快,當時也試了一下 連續語音指令、噪音環境下的指令辨識、上下文理解與泛化理解能力 ,它都回答得很不錯。要說趕上新勢力水平都有點低估了,因為新勢力水平也是參差不齊, 整體上來說魏牌藍山DHT PHEV的智艙語音互動能力超過新勢力平均水平 。

除此之外,藍山的智艙還有一個功能讓我印象非常深刻,那就是DMS駕駛員監測系統。它能辨識出我走神並不奇怪,厲害的是 它可以精確分辨出「打電話」、「疲勞駕駛」、「東張西望」三種不同的走神狀態,並給出不同的提示。當時,我還假裝做出打呵欠的狀態,它竟然可以分辨出這是假裝的!
這種能力肯定是基於深度神經網絡或大模型。這是因為,基於規則的演算法就是針對嘴巴大小、眼睛開合等數據來判斷的,而深度神經網絡或大模型的判斷方法就和人的思維一樣: 如果你能分辨出朋友打呵欠是真是假,那它也能!
當時我就問一同試駕的Autolab白楊同學: 藍山DHT PHEV的智艙演算法很不錯啊,是買的哪個供應商的? 如果買了就可以讓技術騰飛到第一梯隊,為啥其它的傳統車企不買呢 ?
白楊回答,這應該是長城汽車全棧自研的智能座艙系統Coffes OS 2,具備廣適用、高效率、可成長、重安全等特點,可適配長城旗下各大品牌車型,當然也套用到藍山DHT PHEV這款車上啦!
說到「Coffes OS 2」我突然想起來啦,這不就是上半年親自參與研討的「Coffes OS 2」公開課上講述的內容,在具體車型上的實裝嗎? 當時就討論了「Coffes OS 2」的250ms的車機語音響應速度、多領域多意圖指令精準辨識執行、後排抑制與上下文泛化理解能力。
上半年的這次公開課研討活動,我的感受就是描述的功能確實不錯,確實也是未來智能座艙的前進演化方向;只不過,這些東西要想在傳統車企落地實裝在量產車型上,就不知道猴年馬月了(請原諒我對傳統車企的偏見)。實際上,這些功能特性上半年就已經實裝到量產車型上了,我卻直到9月份試駕時才意識到這一點。

也正因為這種偏見,這次試駕藍山DHT PHEV我就沒把它與「Coffes OS 2」聯系起來,也沒有想到上半年描繪的那些功能特性已經實裝到量產車型上了。這次公開課的內容幹貨比較多,詳細介紹了「Coffes OS 2」的功能特性,在此放出來供大家參考。
三、「AI Lab」 —— 長城咖啡智能全景
9月12日,長城組織使用者與媒體走入長城汽車總部,研討了智能相關議題、參觀了「AI Lab」。

「AI Lab」?對大家來說,這是一個新名詞。原來,這是長城成立智能化前沿組織TCAL (Technology Center Al Lab,簡稱 Al Lab)。類比理解,上汽集團設立了一個技術中心為旗下各品牌來服務;長城設立了一個AI Lab,為智能化、動力、底盤等各領域進行AI賦能。

這次藍山試駕,我已經體驗到的主要是咖啡智駕與「Coffes OS 2」智艙兩個方面,其實這還只是冰山一角。下圖描繪了咖啡智能的全貌 :

說實話,這就到了技術深水區,理解起來會有一定的難度。我嘗試從一橫一縱兩個方向來科普一下,橫是講廣度、縱是講深度。
1. 咖啡智能AI Lab的廣度
Coffee OS智艙與Coffee Pilot智駕大家可以上手體驗到,比較好理解。 那麽Coffee AI Cloud咖啡智能雲與底層Coffee EEA咖啡電子架構是什麽呢 ?
Coffee AI Cloud是長城汽車圍繞使用者及車輛全生命周期管理,建設的智能雲平台,其基於運維統一管理、網絡統一接入、業務域靈活管控的雲邊端一體化系統架構,連線車端及泛AIOT智能終端,聚合內外部服務生態,打通智慧交通、智慧社區、智慧城市等基礎設施和三方平台,為使用者提供全場景智慧車生活服務。
聽完還是不懂? 我來做一個略顯大膽的描述:Coffee AI Cloud是力爭將統一體驗從車裏帶到車外,從車機帶到手機APP,從座艙帶到家裏甚至城市 。前一段蔚來不是造手機了嗎? 也可以類比理解為這是蔚來雲的一次嘗試——表面上是透過手機這個紐帶連線車、手機、換電站,背後支持的實際上就是這朵雲(Cloud)。
個人理解,這還只是Coffee AI Cloud的第一步,目標是將「智能座艙」拓展成到「智能空間」; 第二步可能就是改造整個研發與制造流程,用AI賦能長城整個企業。
至於底層Coffee EEA咖啡電子架構,則是整車的「智慧筋骨」,強調的也是(Service-Oriented Architecture,面向服務的架構)。 概括來說,就是在底層改造硬件上的電子電氣架構與軟件上的SOA架構,使之升級潛力更大、可以支撐將來的智能功能開發、用了很多年也不會過時 。
2. 咖啡智能AI Lab的深度
AI Lab的四個技術方向其實都走了很深,只是產品端與行銷端的滲透需要一定的時間 ,所以大家才覺得新奇。我還以為大家最感興趣的Coffee Pilot咖啡智駕為例,以點帶面來講講咖啡智能AI Lab進展到哪種深度了。
咖啡智駕Coffee Pilot一個最大的特點是直奔無圖,下面兩個動圖可以看到它在北京無圖區域的無保護左轉與隧道表現都非常老司機。
咖啡智駕Coffee Pilot的DriveGPT底層模型采用GPT( Generative Pre-trained Transformer)生成式預訓練大模型。GPT的本質是不斷求解下一個詞(Token)出現的概率,DriveGPT就是求解的駕駛場景Token的出現概率,透過不斷迴圈生成自動駕駛場景Token序列。
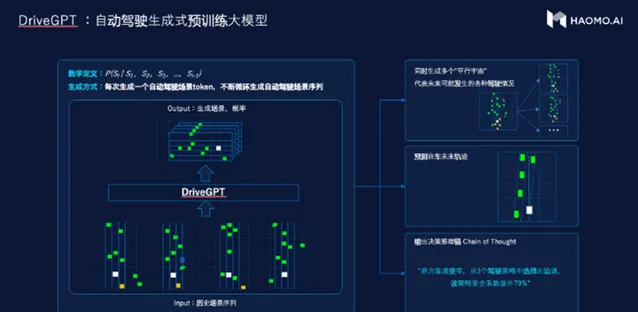
這就可以解釋通了,我在試駕藍山DHT PHEV的時候,為什麽沒有高精度地圖的HWA高速自動駕駛輔助系統也可以變道超車?為什麽變道靈活,策略多變宛如老司機?正是因為咖啡智駕Coffee Pilot有基於無圖的DriveGPT大模型打底賦能!
目前DriveGPT已經使用了4000萬公裏的駕駛數據做Pretrain(預訓練)、引入大約5萬段駕駛接管Clips數據進行RLHF人類反饋強化學習,這就保證了交到使用者手上時就比較好用。

此外還建立了 MANA雪湖運轉的是效能超強的MANA OASIS雪湖·綠洲自動駕駛智算中心,每秒浮點運算達67億億次(670 PFLOPS)、通訊頻寬每秒800G 。作為對比,小鵬扶搖超算浮點運算600 PFLOPS、通訊頻寬為每秒800G;吉利星睿智算中心總算力810 PFLOPS、通訊頻寬為每秒800G。可以看出,MANA OASIS雪湖·綠洲自動駕駛智算中心的效能屬於行業頂級水平。

總結
管中窺豹,我們從咖啡智駕Coffee Pilot來看,它追求的不是最早最快最先出風頭,而是追求確立長遠的技術方向(直奔無圖與DriveGPT大模型)、重金打造建立提升研發速度的「硬貨」超算中心(MANA雪湖),這才是努力達到「技術奇異點」的戰略措施。當然,實際上咖啡智能體系於2020年起步也不晚,只是大家知道得比較少。
除Coffee OS智艙與Coffee Pilot智駕之外,咖啡智能還搭建了Coffee AI Cloud咖啡智能雲與底層Coffee EEA咖啡電子架構 , 這就構成了AI Lab的完整體系。

俗話說,士別三日當刮目相看,在智能技術的「技術奇異點」即將來臨之際,我們應該更密切地關註車企在「力爭達到技術奇異點」方面的投入: 超算中心、大模型演算法架構和AI賦能的廣度 。










