2020年自動駕駛地圖形態發生了變化,仍然重要但角色不同了。作為一個高精度地圖相關經理,曾經也處理相關公司的資本收購和技術開發業務。這裏講一下。
首先梳理一個先導問題:導航地圖對自動駕駛有多重要?
這個問題很好回答,你現在不開車機,不開手機,請從你的所在地開到北京王府井大街。嗯
估計在目前這社會,也就那可能(2%不到的)路上老的哥,還知道這個世界上有指路牌這個東西,大部份司機估計分分鐘被教做人。
很顯然, 人做不到的事情,別指望自動駕駛能夠做到 ,自動駕駛領域,放很長一段時間這句話都適用,那ok,SD圖對自動駕駛車是需要的。
然後梳理題主的問題:高精地圖對自動駕駛有多重要?
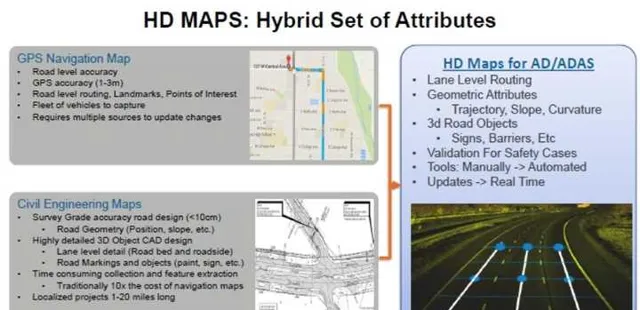
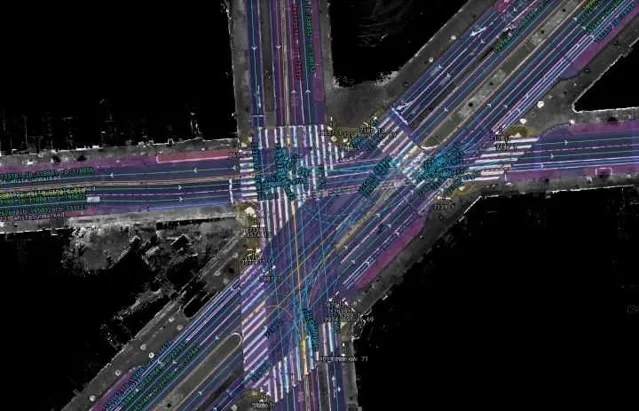
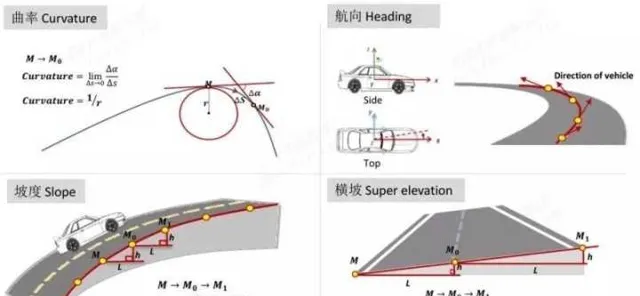
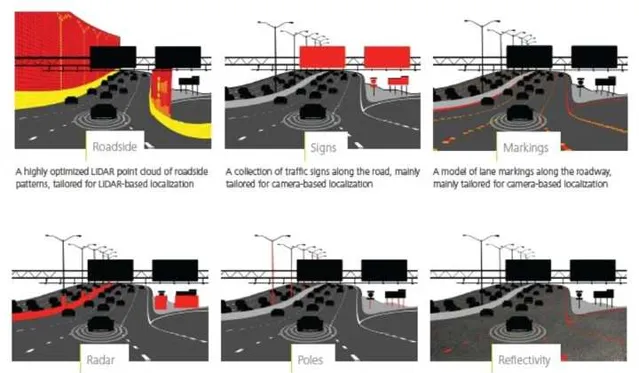
目前大家理解的高精度地圖,是這樣的
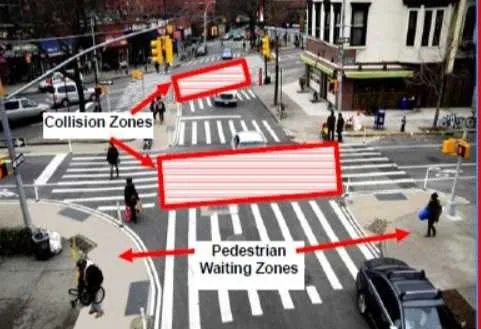
我們繼續剛才的思考實驗,那這種級別的地圖對人類司機來說重不重要?它相當於人類駕駛過程中的地圖,應該類似這樣

這是不是很重要? 算有點重要,但已經不是這麽重要了 。因為如果你是自己非常習慣的通勤道路,沒事,估計99%的朋友,不要導航地圖就能夠解決。但如果是第一次,在沒有這種高精度圖片的導航下,你可能有20%的可能性,沒有提前並道,或者轉彎有多個入口的時候,一不小心進錯口了。這些場景下,高精度地圖發揮了作用。這裏強調下,目前這些都是針對人類這個水平的能力進行評估的。
除了剛才這些場景,地圖似乎不被需要,但放在自動駕駛高精度地圖上來看,情況並不是這樣。
實際上如果用一個公式精練各種語言描述的話:

實際上高精度地圖和感知在很大一個區間是互補關系。另外還有一層關系是最近幾年才逐漸被大家認同的,他們是相互依賴的關系,這就需要提出 眾包地圖的概念了。
高精度地圖本質是人類的行駛記憶
如果你開車覺得對路況熟悉非常關鍵,那高精度地圖就非常關鍵。
用普通使用者的話說: 如果我經常開的路,我記得,那我不需要高精度,甚至不需要導航。
從自動駕駛演算法角度來說: 對某一個時刻,不同空間上的資訊進行獲取合並,我們叫特征提取與融合。也就是那個時刻,我看到了什麽。把這個時間尺度拉長到10秒,繼續合並資訊,我們叫局部場景重建,也就是我這10秒,大概掌握了附件哪些狀況(燈要變紅,車要cutin),再把不同司機,更長時間的數據進進一步的進行合並就是眾包地圖了。
如果地圖可以認為是人類的形式記憶,那它的外延就非常寬泛了
目前大家對於地圖的理解:



後面地圖可以包含更多的內容:
有些由於定位的傳感器資訊,也有可能直接被儲存在地圖中,用於傳感器需要,但人類並不一定需要的套用當中。
地圖未來的表征形式也在發生著巨大的變化
一種是記憶網絡對於高精度地圖普通表征的部份替換,規避了經緯度這種概念,和固有的地圖組織形式
另一種是對固有地圖組織形式的改變,利用圖神經網絡,將其進行編碼,方便更多網絡類感知演算法的介入。

地圖使用的後續問題
地圖本身是一個非常大的課題,包括地圖引擎的設計,地圖雲端數據的計算和成圖流程,質保體系設計,中國的地圖資質問題等。如果大家有興趣,我寫了一些專題文章,大家可以閱讀下。
歡迎關註我的專欄,與其他作品
深度學習入門(1)-我是一個渣男我是一個渣男,有著豐富的閱女經歷,然而女孩子實在過於復雜,不好好思考總結已經不足以支持我穩定的發揮,因此我決定拿起「深度學習」的工具來「深度學習」下女孩的心思,為了成為一個更好的PUA,呵呵呵。 如何要成為一個有「方法論」的PUA,核心便是要練…
關註我,聽祖孫三代汽車人聊聊汽車的傳承與改變!











