無人駕駛如何實作成本和規模化之間的平衡?輕舟智航認為不同的場景有不同的答案。
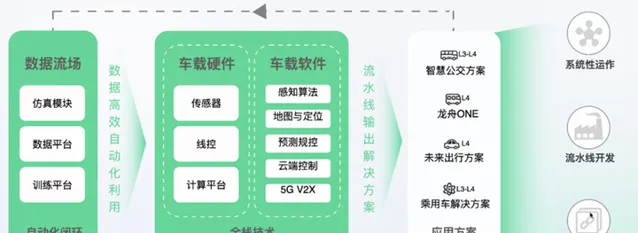
但這並不意味著不同場景的方案就完全不可以通用。在輕舟智航看來,透過硬件上的平台化和模組化開發,客製好不同場景的硬件配置,然後高度抽象給軟件適配,就可以讓軟件具有較高的通用性。輕舟智航的Driven-by-QCraft由此而來。
作為輕舟智航專為自動駕駛打造、集軟硬件於一體的整體解決方案,Driven-by-Qcraft自設計之初就考慮到盡量采用同一方案賦能不同的車型落地多個城市,從而使得數據可以共通,加快形成數據閉環。為此,輕舟智航一直在不斷叠代這套方案。
近日,輕舟智航宣布推出全新的Driven-by-QCraft第三代L4自動駕駛硬件方案。據悉,該硬件方案在傳感器、計算平台、電源、通訊等模組均采用了全冗余設計,以進一步提升安全性,以及適配不同的車型和場景。

圖片來源:蓋世汽車
輕舟智航「上新」,推出第三代L4硬件方案
據輕舟智航聯合創始人、CTO侯聰介紹,為達到車身周邊360度無盲區感知效果,穩定感知外部道路參與者資訊,Driven-by-QCraft第三代自動駕駛硬件方案采用了多傳感器融合的方式構建傳感器系統,包括2個長距離測量激光雷達(主LiDAR)、3個近距離補盲激光雷達(盲區LiDAR)、4個毫米波雷達、9個感知網絡攝影機和1個IMU套裝。這些傳感器分布在車左右兩側,可以互為冗余。
並且這些傳感器在安裝位置上也十分有講究。比如套件中的激光雷達,旋轉方向在同一時刻均保持一致,具備高度同步性。如此一來,當周圍有動態物體出現的時候,點雲不會出現錯位或重影現象,同時保證可將所有激光雷達的點雲數據收集在一起集中處理。
7顆500萬像素的周視相機采用了逆時針旋轉90度的安裝形成縱向檢視,既保證了相機逐行曝光方向與激光雷達掃描方向的一致性,提高兩者的前融合效果,又有效減少了地面盲區。據測算,這種方式相比傳統安裝方式地面盲區面積減少了90%以上,尤其是對周邊近距離物體,如交通錐,和小動物、足球等矮小物體的辨識能力有明顯提升。

圖片來源:輕舟智航
針對紅綠燈的辨識,輕舟智航還設計了專門的辨識紅綠燈的相機,對於不同光線條件下的過曝、欠曝以及車輛在行駛過程中因運動模糊導致的拖影問題,開發專門的演算法。據悉,該相機能夠在夜晚場景中精準辨識出150米外的紅綠燈形狀及顏色。
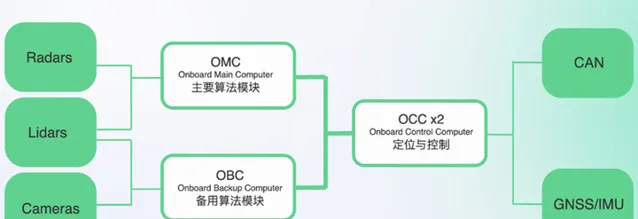
而在計算平台方面,Driven-by-QCraft也實作了主計算單元OMC、備份計算單元OBC、車載計算單元OCC三個層次的冗余設計。
圖片來源:輕舟智航
正常情況下,主計算單元負責自動駕駛系統軟件功能的執行、計算。在主計算單元因為特殊原因發生故障以後,為了確保車輛系統的安全,備份計算單元會接收車輛的控制,決定車輛下一步的運動行為,從而讓車輛在異常情況下可以靠邊停車、緊急剎車等。而OCC上則同時部署了定位和控制模組,來實作更多一路的冗余。
電源系統方面,透過將功率路徑分層管理,可根據不同天氣狀況、道路條件即時進行電能動態分配,優先支援核心功能模組,調節輔助功能模組供電,延長車輛營運裏程。有效辨識和隔離系統異常故障單元,避免故障級聯,保護核心功能模組在小概率隨機故障時不受影響。配合冗余電源和傳感器設計,在單一甚至多個核心功能模組意外受損時,還能維持保證車輛行駛安全的最小子系統。
據侯聰介紹,這套解決方案采用的是車規級量產方案,目標是以較低成本實作較高的感知。雖然在目前情況下,成本還無法達到理想的狀態,但比起前一代已經有所降低。未來隨著采購規模的不斷提升,成本有望進一步下降,在未來2-3年內整套傳感器的成本或下降至5位數。
圖片來源:輕舟智航
這樣一套方案後續將同時服務於RoboTaxi和RoboBus兩種場景。不僅如此,侯聰指出,如果對這個系統稍微做一些適配,也可以用於去做L2或L3的輔助駕駛,而輕舟智航也有這種計劃,即這個設計本身就會考慮到跟主機廠合作的可能性。
此外他還表示,對於除RoboTaxi和RoboBus之外的其他城市場景,Driven-by-QCraft也可以很好地適配。「比如小的物流車以及大的卡車,無論是輕卡還是重卡,只要是在城市的場景下我們都是可以適配的。我們之前其實已經做過一些探索,包括小的物流的探索是沒有任何問題的,像輕卡它本身跟小巴體型比較相似,所以我們這種安裝方案也就比較相似。」
助力自動駕駛演進,輕舟智航再獲強援
伴隨著第三代L4硬件方案,近日輕舟智航在推進自動駕駛落地方面還迎來了另一關鍵進展——與NVIDIA達成合作,在其Driven-by-QCraft下一代硬件方案中率先使用NVIDIA DRIVE Orin 方案。
作為輝達第三代的無人駕駛芯片,Orin很好地繼承了之前Xavier的總體的架構,但也增加了很多效能。據輝達中國區域軟件總監卓睿介紹,隨著軟件定義汽車趨勢的發展,對算力要求越來越高,且這些算力不只包括 GPU,還包括CPU。輝達在設計Orin時采用了混合架構,以在不同的硬件上部署不同的算力,實作較高的靈活性。就算力而言,Orin可以支持從250~2000TOPS的算力。
圖片來源:輝達
針對量產車的高安全、高可靠性要求,NVIDIA DRIVE Orin也滿足量產車規級,在系統層面符合 ISO 26262 功能安全 ASIL-D 標準。並且Orin還采用了新的安全架構,可以實作較高的資訊保安。
據侯聰透露,大概在年底之前輕舟智航就將可以拿到Orin的開發板,目前團隊已經針對上一代Xavier平台做了一些相關的開發,包括傳輸驅動、數據傳輸、模型適配等,後續會把整個系統做一個遷移,屆時有望助力龍舟系列自動駕駛車實作更大規模的落地套用。
作為城市交通的補充,輕舟智航推出的龍舟ONE可支持區域內的固定行車路線,沿途可根據需求設立站點、專用車道,及時疏散主幹道交通流量,保證公共交通系統的快捷高效性,開啟智能化的城市「微迴圈」交通時代,解決居民出行的「最後三公裏」難題。

圖片來源:蓋世汽車
目前,龍舟ONE已成功在蘇州、深圳、武漢等6座城市落地常態化營運,成為國內布局城市最多的公開道路自動駕駛小巴。今年10月,輕舟智航還在無錫釋出了全國首個公開道路5G自動駕駛網約巴士,進一步打破Robobus與Robotaxi的邊界。
如果加上在其他場景的套用,截至當前搭載輕舟智航Driven-by-QCraft硬件方案的自動駕駛車輛已在北京、深圳、蘇州、矽谷等全球10座城市落地測試和營運,共計部署了10款車型,涵蓋小巴、大巴、乘用車等多種不同產品形態。接下來,輕舟智航表示將會進一步擴大測試營運範圍,到年底整體車隊規模有望達到百余台。
*版權聲明:本文為蓋世汽車原創文章,如欲轉載請遵守 轉載說明 相關規定。違反轉載說明者,蓋世汽車將依法追究其法律責任!











