比陸地更遼闊的是海洋,海水覆蓋了地球約 71% 的表面積。不過,海洋學者認為人類只探索了其中的 5% 而已。 人們經常對較淺的海洋進行勘探,但由於極端的靜水壓力,深海區域基本仍是一片神秘領域。
目前,設計精良的水下機器人在深海任務中具有出色的機動性和功能性,勘探深度能達到 3000-11000 米,比如中國自主研發的 「蛟龍號」「奮鬥者號」 等載人潛水器,在深海探礦、海底高精度地形測量、可疑物探測與捕獲、深海環境與生物考察等任務中都扮演著關鍵角色。
但是,這些深海潛水艇通常需要特制的壓力槽或壓力補償系統來保護內部機電系統,考慮到海底極端條件下結構破壞的風險,深海勘探仍然具有危險性和挑戰性。 然而,大自然是神奇的,沒有耐重壓系統的深海生物卻可以在極深的海域繁衍生息,靈活遊走。
受深海生物特性的啟發,來自浙江大學、之江實驗室的科研團隊及其合作者開發了一種能用於深海探測的無線自供能軟體機器人 ,他們透過在馬利安納海溝最深 10900 米處和南海最深 3224 米處進行實際測試,驗證了這種機器人具有極好的耐壓和遊泳效能。
圖|在 10900 米深的馬利安納海溝中,軟體機器人的雙鰭拍打動作(來源: Nature )
相關研究論文以 「 Self-powered soft robot in the Mariana Trench 」(馬利安納海溝裏的自供能軟體機器人)為題,於2021年 3 月 4 日發表在【自然】( Nature )雜誌上。
(來源:Nature)
靈感來源於一種深海魚
論文裏介紹的這種深海機器人,是一種典型的仿生裝備與系統。 目前,生活在中等海洋深度(約 1000 米)的軟體生物,如章魚和水母等已被廣泛研究,它們的適應能力啟發了很多水下軟體機器人的設計,為深海探險提供了很多有前途的方法。
這類軟體機器人的效能很大程度上取決於軟啟動器,包括介電彈性體(dielectric elastomers,DEs)、水凝膠和射流裝置等,近年來的許多研究表明,具有撲翼、波動、噴射等推進方式的柔性機器人具有良好的遊泳效能。
盡管如此,這類機器人的動力和控制電子系統仍然需要笨重而堅硬的容器來抵禦深海極端壓力,一種沒有剛性容器、能在極端深海遊泳的、有壓力彈性的軟機器人還沒有被開發出來。
浙江大學李鐵風、李國瑞及其合作者設計開發的這款軟體機器人,靈感則是來自鈍口擬獅子魚( Pseudoliparis swirei ) 。早在 2014 年,科學家就在馬利安納海溝中約 7000 米處深度捕獲到了這種魚類,據了解,鈍口擬獅子魚還創下了一項人類拍到活體魚類的最深紀錄 ——8178 米。
圖|鈍口擬獅子魚(來源:Mackenzie E. Gerringer)
馬利安納海溝深處的壓力有多大? Nature 文章中有一個形象的描述,類似於把一整座埃菲爾鐵塔的重量全都壓在人類大腳趾上。 在那種寒冷、黑暗和極壓的環境下,高壓能壓碎人的骨頭,壓扁鋼鐵潛水器材,而這些魚卻表現出了奇好的生存性和移動性。
所謂「適者生存」,這種魚在身體特征上包括一個分布的頭骨和能拍打的胸鰭,由軟骨和細胞膜組成的骨架等,這指導了李鐵風、李國瑞團隊及其合作者進行一種創新的深海軟體機器人設計。
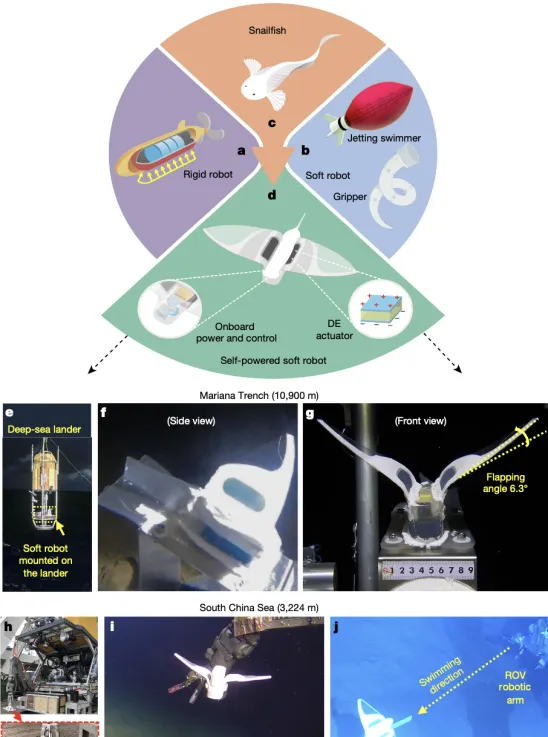
圖|機器人設計與深海試驗(來源: Nature )
據論文描述,研究人員已對這種軟體機器人進行了多方位測試報告。它被安裝在深海著陸器上,在馬利安納海溝 10900 米深度的現場測試中成功啟動, 這個軟機器人內部內建容量為 2500mAh 的鋰離子電池和高壓放大器用來自動供電 ,團隊使用受保護的攝影機和深海著陸器上的 LED 燈記錄了試驗過程,在這次測試中,機器人沒有從著陸器中釋放出來, 在沒有壓力槽的情況下,撲鰭驅動保持了 45 分鐘 。
在中國南海的現場試驗中 ,軟體機器人由遙控潛水器(ROV)攜帶到 3224 米的深度。在 8kV 交流電壓和 1Hz 的驅動下, 該機器人以 5.19cm 每秒(即每秒 0.45 體長)的速度拍打雙鰭運動,成功實作自由遊動 。
圖|軟體機器人在 3224 米深海遊動(來源: Nature )
獨特的電子和機械設計
據了解,這種機器人設計成功的關鍵之一是壓力彈性電子元件。 傳統的水下航行器需要金屬材料制成的水密外殼,以承受深海高壓,這些外殼的厚度和尺寸必須增加,以適應更大的深度。但在研究團隊此次設計的機器人中,精密的電子元件被嵌入並分布在柔軟的矽樹脂基體中,這種設計消除了對耐壓外殼的需求。
研究人員透過測試發現,如果電子元件密集地封裝在一塊印刷電路板(PCB)上,壓力測試表明在它們的介面處容易發生故障,因此需要一種方法來保護機器人的電子元件免受高壓影響, 啟發則是來自鈍口擬獅子魚分布的頭骨 。
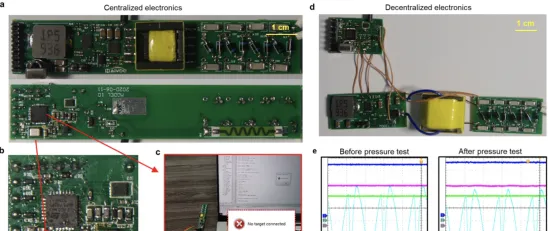
圖|集中和分散電子器材的壓力試驗(來源: Nature )
為了提高壓力恢復力,他們采用了分散式設計來降低剪下應力。 在這種設計中,元件與幾塊較小的 PCB 進行線連線或分離,這裏的 「分離」 是指去除電子元件之間的直接剛性接觸。
實驗室試驗和模擬表明,這種布置降低了受壓部件之間介面處的應力,然後將分布式電子器件嵌入矽樹脂中,以便並入機器人, 該方法比其他保護深海器材電子器材的方法更實用,也更便宜。
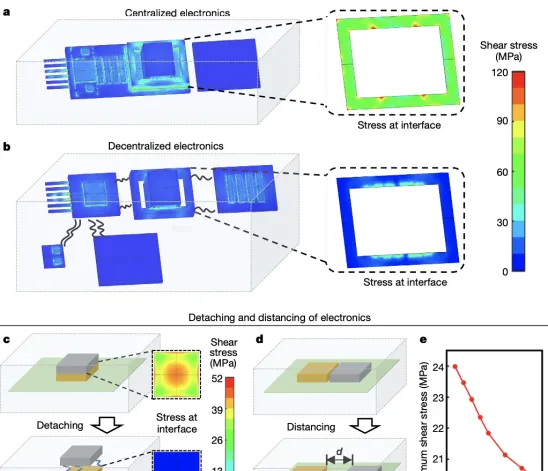
圖|聚合物封裝電子器件的耐壓效能(來源: Nature )
對於相同的外加壓力(110MPa),分散電子器材界面處的平均切應力低於集中電子器材(約 60MPa),研究人員進行了一系列的壓力室實驗(110MPa),以確認這種分散電子具有更高的壓力彈性。此外,由於從 PCB 上拆下所有元件在技術上是困難的,因為它們的數量很大,為了減少這些元件之間的應力,研究人員在設計時還增加了相鄰電子元件之間的距離, 當相鄰部件之間的距離從 0.4 mm 增加到 2.4mm 時,測試分析顯示,最大切應力能減少 17% 。
設計好了電子部份,另一方面就是機械驅動部份 ,這裏的一個關鍵套用是介電彈性體(DE),一種加上電壓即可出現形變的電啟用聚合物,這種材料能將電能轉化為機械功 —— 當機器人電池的電流作用於肌肉時,肌肉就會收縮,微小的固體結構透過機械方式將收縮肌與鰭相連,使其拍打運動。
最終,他們把機器人設計成了魚一樣的身體形狀,有兩個拍打的側鰭。 該機器人長 22 厘米(體長 11.5 厘米,尾長 10.5 厘米),翼展有 28 厘米,電力和控制電子器材包括鋰離子電池、高壓放大器、紅外接收器、放電電阻器和 MCU。
它同時具有以下特點: (1)位於支撐架和拍打鰭接合處的 DE 「肌肉」;(2)由較硬的前緣和彈性框架支撐的薄矽膠拍打鰭;(3)嵌入其軟體內的分散電子。彈性框架粘在預拉伸的 DE 肌肉上,以提供支撐,並將 DE 膜的平面內驅動轉換為鰭拍打運動,當施加交流電壓時,周期性變形的 DE 肌肉產生兩個鰭的拍打運動以推進遊動。
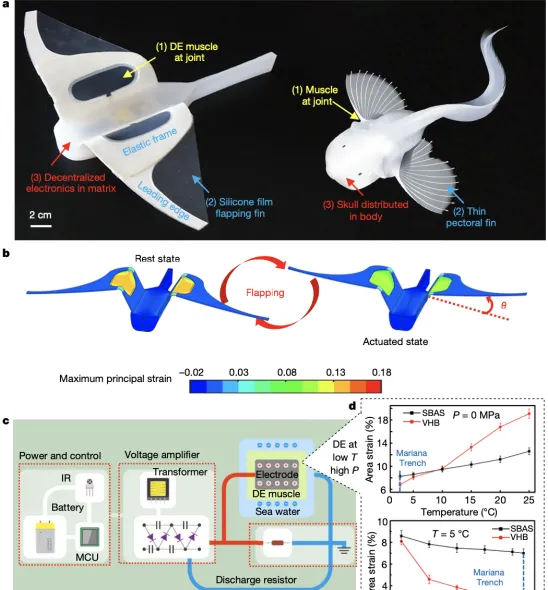
圖|軟機器人的設計與制造(來源: Nature )
此外,DE 材料也經過了精心設計,可在深海低溫高壓下保持其電壓感應驅動。 研究人員在高壓下測量了由典型 DE 材料(VHB)制成的圓形致動器的電壓感應區域應變,結果發現,當實驗條件從(0MPa,25°C)變為(110 MPa,5°C)時,電壓引起的區域應變從 19.1% 下降到了 2.4%,不足以推動機器人。
因此,他們采用了一種新的三嵌段共聚物:SBAS。 在相同的實驗條件下,SBAS 的電壓感應面積應變從 12.5% 下降到 7.0%,由於拍動雙鰭的設計已得到最佳化,這種材料的表現對於軟機器人深海自由遊泳來說已經是足夠高的應變。
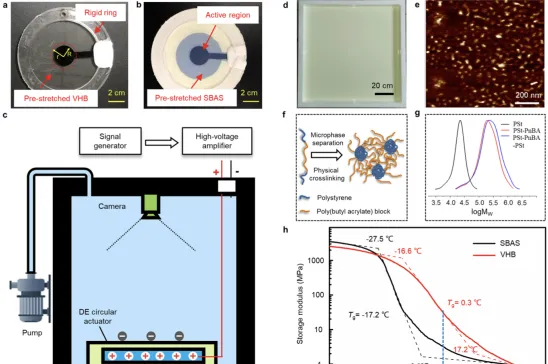
圖|VHB 和 SBAS 的驅動效能實驗(來源: Nature )
研究人員在額外的動態力學分析(DMA)中表明,VHB 和 SBA 的不同效能源自其不同的玻璃化轉變溫度(Tg),分別為 0.3°C 和−17.2°C,這一結果突出了由於微相分離,較低的 Tg 對提高三嵌段共聚物 DE 的機電效能的影響。
開啟深海探險新方式
除了深海實地測試外,研究團隊還進行了一系列的壓力艙和深湖實驗,進一步驗證了該軟體機器人的遊泳效能。
他們在實驗室中觀察記錄了該機器人在 110 MPa 的靜水壓力中,在不同電壓(7 kV、8 kV、9 kV,2 Hz)下測試遊泳效能。 當驅動電壓為 7 kV,頻率為 1Hz 時,在 0MPa 和 110MPa 的壓力下,機器人能以 3.29 cm 每秒和 2.76cm 每秒向前遊動。 此外,還在一個深湖中用遙控潛水器將其帶到水深處,對軟機器人的自由遊動進行了現場測試, 該機器人在 8 米深處能以 3.89cm 每秒的速度遊泳,在 70 米深處能以 3.16cm 每秒的速度遊泳,證實了它對野外探險的魯棒性。
圖|軟體機器人在測試在 110 MPa 的靜水壓力中測試(來源: Nature )
圖|軟體機器人在湖中測試(來源: Nature )
研究人員表示,此次取得的實驗成功有可能擴充套件到各種其他軟器材上,未來如果整合額外的功能單元或重新排列電路則有望產生多種附加功能,例如深海中的傳感和通訊。
具有傳感、驅動、電源和控制系統的軟器材可以完全整合,以監測和調節機械濫用條件下的復雜任務(不僅是高壓,還有其他困難的機械條件,如振動或沖擊)。 研究團隊的未來工作將集中在開發新的材料和結構,以增強軟機器人和器材的智能性、多功能性、機動性和效率。
此前人們曾多次嘗試開發套用於水下的各類軟體機器人,但由於機器人傳感器在深海環境下工作不良,因此機器人與物體的精細互動是一個具有挑戰性的領域。另外,軟機器人抓手要比剛性抓取裝置具有很大的優勢,且受生物啟發的軟體機器魚可以在其他動物之間遊動,而無需對它們造成幹擾,因此可以進行近距離研究觀察。
新加坡國立大學教授 Cecilia Laschi 在評論文章中表示 , 研究團隊如今已經突破了可以達到的極限:用嵌入軟材料中的分布式電子器件取代電子元件的剛性保護外殼,為新一代深海探險家鋪平了道路。
然而,在海洋中布置這種設計的機器人之前,還有很多工作要做。 因為這項研究開發的機器人比之前報道的水下機器人移動要慢,而且不能承受太多環境的幹擾,比如它很容易被水下暗流沖走,其運動能力也需要針對實際套用進行最佳化。
從長遠展望來看,人們可以預測海洋生物學研究的發展方向 ,即軟體機器人在珊瑚礁或水下洞穴中安全航行,在不損壞珊瑚礁或洞穴的情況下采集精致的標本,成群的水下軟機器人能夠在海床上爬行,將自己固定在特定的結構上或在特定的區域遊走探索。
這將有助於各種其他套用技術的發展,進一步為推動海洋監測、清理和防治海洋汙染、保護海洋生物多樣性提供更多創新方案, 更重要的是,它們可以幫助科學家探索海洋深處的大片未知地帶 。
參考資料:
https://www. nature.com/articles/s41 586-020-03153-z
https://www. nature.com/articles/d41 586-021-00489-y
https://www. nature.com/articles/d41 586-019-01158-x
https:// theconversation.com/the -deepest-dwelling-fish-in-the-sea-is-small-pink-and-delicate-88991
https:// person.zju.edu.cn/litie feng
https:// mackenziegerringer.wordpress.com /research/










