摘要
高效能激光雷達在自動駕駛汽車、地面自動駕駛車輛和智能機器等自主機器人中必不可少。傳統的機械掃描激光雷達在自動駕駛車輛中具有優越的效能,但由於固有的制造難度,潛在的大規模套用受到限制。我們提出了一種基於不可公度掃描的機器人激光雷達傳感器,允許直接大規模生產和在自主機器人中采用。這種不可公度掃描還允許一些獨特的特征。與人類視網膜上的眼窩相似,這種激光雷達的特點是中心角密度達到峰值,使應用程式更喜歡像眼睛一樣的註意力。這種激光雷達的不可公度掃描方法還可以提供比傳統激光雷達高得多的分辨率,這有利於機器人套用,如傳感器校準。本文舉例說明了利用這些優點的例子。
I. 介紹
激光雷達(light detection and ranging)已成為一種重要的科學儀器,在環境調查[1]、[2]、空氣氣溶膠測量[3]、亂流探測[4]和空間探索[5]等領域有著廣泛的套用。最近智能機器人的進展,如自動駕駛汽車,對更小和更低成本的激光雷達傳感器提出了重大要求,這些傳感器在探測、感知和導航等任務中是不可或缺的[6]-[8]。現有的機器人激光雷達[1]雖然效能相對較好,但在成本、尺寸和可靠性上很難滿足大規模部署的要求,阻礙了自動駕駛汽車和其他智能機器人的發展和大規模部署。我們提出了一種新型的激光雷達傳感器,它在這些方面以及效能上都具有優勢,有可能加速全自動機器人的發展。這款激光雷達具有類似於人視網膜的角密度分布,非常適合受人類視覺註意機制啟發的場景感知和跟蹤套用。這種獨特的掃描方法還可以在有足夠積累時間的情況下以高分辨率捕捉視場(FoV),這對各種機器人套用(如傳感器校準)是有利的。這種新型傳感器也可以透過簡單的修改進行升級。
II. 相關工作
A、傳統機械多線激光雷達
現有的機器人激光雷達的主導類別是基於多線機械掃描的,因為它很簡單,而且在從DARPA grand到urban的自主駕駛比賽中取得了成就[1], [6]-[8]。在這些飛行時間型激光雷達中,多對半導體收發器,即脈沖激光二極管(PLD)和雪崩光電探測器(APD),在望遠鏡的焦平面上光學排列,形成一個垂直陣列的測距器。這些測距儀然後沿垂直軸旋轉,以全方位角沿視線捕捉物體。作為一個例子,圖1(a)示意性地示出了傳統16線激光雷達的工作原理[1]。PLD和APD元件位於伸縮透鏡的焦平面上,使得準直光束平行於與半導體和透鏡中心相交的直線[9]。每一對PLD和APD收發器將負責一個不同垂直角度的測距光束。(在圖1(a)中,來自16個收發器對中最後一個的光束被作為一個例子加以說明)。該激光雷達的FoV(視場)由PLD和APD元件(圖1(a))相對於伸縮透鏡的垂直空間跨度決定。因此,垂直分辨率由FoV內收發器的數量決定。然而,當需要以對準精度(對於最佳探測範圍)和大空間跨度(對於大垂直FoV)對準許多收發器時,這些激光雷達的裝配自動化變得困難,即動態範圍問題。然而,當需要以對準精度(對於最佳探測範圍)和大空間跨度(對於垂直較大FoV)對準許多收發器時,這些激光雷達的裝配自動化變得困難,即動態範圍問題。例如,在利用靜態照相機機器視覺的尺寸測量系統中,最小可測量值受到像素尺寸、繞射極限、光學像差及其組合的限制,而最大測量範圍受到CMOS傳感器尺寸和焦距的限制。一般來說,對於一個給定的物理系統來說,動態範圍是很難改善的,並且一直是不同領域中許多研究課題的目標。
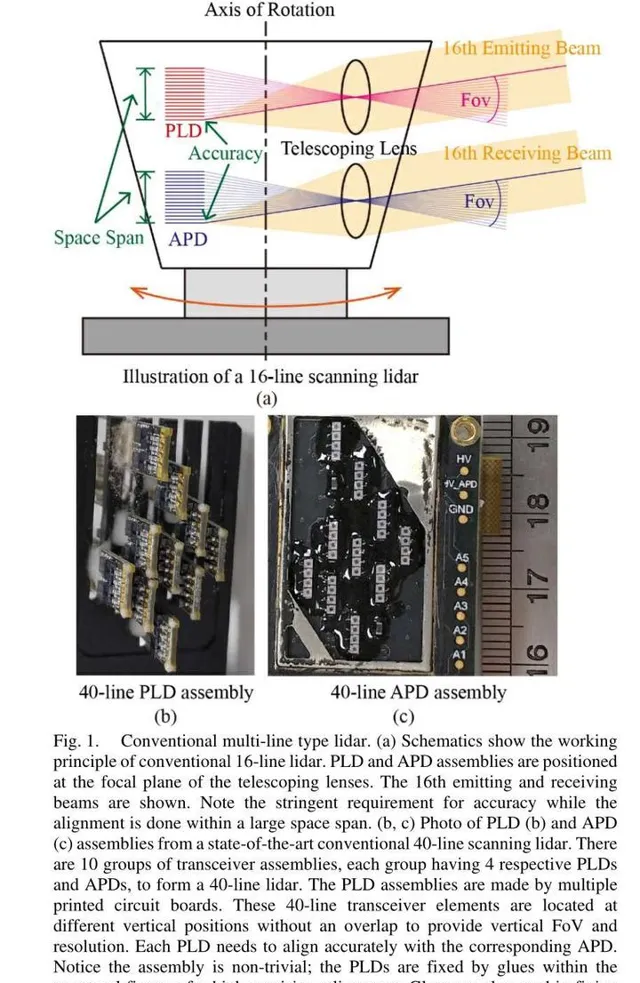
圖1、傳統多線型激光雷達。(a)示意圖顯示了傳統16線激光雷達的工作原理。PLD和APD元件位於伸縮透鏡的焦平面上。示出了第16個發射和接收波束。請註意,在大空間跨度內進行對準時,對精度有嚴格的要求。(b,c)來自最先進的常規40線掃描激光雷達的PLD (b)和APD (c)元件的照片。有10組收發器元件,每組有4個相應的PLD和APD,以形成40線激光雷達。PLD元件由多個電路板制成。這些40線收發器元件位於不同的垂直位置,沒有重疊,以提供垂直FoV和分辨率。每個PLD需要與相應的APD精確對齊。請註意,該程式集並不簡單;可程式邏輯裝置透過膠水固定在結構夾具內,以實作高精度調整。膠水也用於固定APD。
在多線激光雷達系統的對準中,動態範圍可以定義為空間跨度與最小對準精度之比。如圖1(a)所示,空間跨度被定義為允許PLD/APD移動的總垂直空間。最小對準精度被定義為最佳對準PLD和APD的最小容許位移,使得發射光束在角度上最大程度地與接收光束重疊。對於多線激光雷達的當前設計,空間跨度通常約為5cm(圖1(b)和1(c)),有時可以達到10cm以上,而精度要求約為10微米,因為PLD和APD芯片的有效面積約為100μm。這些數碼給出了超過5000(5cm/10μm)的動態範圍,這對現有的對準和裝配自動化來說是很困難的。這些限制可能包括機器視覺的像質數量有限,由於應變或熱膨脹,在大的可移動規模上的粗略定位不準確,對準反饋訊號不敏感,或者僅僅是缺乏工具來準確定位小型外殼內的PLD和APD。此外,由於大的靈活性(跨度)要求,這些半導體需要被粘在夾具上。涉及初始固化和熱處理的復雜膠合過程使動態範圍問題更加復雜。(圖1(b)和1(c))因此,制造這種類別的激光雷達需要熟練的工人進行冗長的對準程式,從而使汽車市場的產量和成本令人望而卻步。額外的成本也來自於許多收發器對和它們各自的高速電子器材,因為垂直分辨率與收發器對的數量直接相關。
B. Risley棱鏡對
由兩個串聯安裝的折射棱鏡組成的Risley棱鏡對(圖2(a))提供了另一種簡單而通用的光學掃描方法。基於棱鏡的方法的獨特優勢,如成本低、尺寸小和穩定性強,使其廣泛套用於顯微鏡[11]、幹涉測量[12]、紅外成像[13]、紅外對抗[14]、爆炸物檢測[15]、自由空間通訊[16]和空中物體檢測[17]。我們建議可以在機器人激光雷達設定中探索這些功能,特別是為了克服現有機械激光雷達的制造障礙,並實作自動駕駛汽車等自主機器人的升級。在本文中,我們系統地探討了基於Risley棱鏡的低成本機器人激光雷達的設計和套用。
研究所得點密度分布並與人類視網膜進行比較。不可公度掃描是與 Risley 棱鏡光學轉向相關的獨特特征,在機器人套用方面進行了理論和實驗討論。我們還展示了該設計在掃描密度增加和專門針對自動駕駛的客製視野方面的效能可升級性。提供了展示此類激光雷達優點的範例。
III. 基於棱鏡的激光雷達設計
A.基於棱鏡的激光雷達的構建
在圖 2(a)中,我們展示了基於棱鏡掃描的新型激光雷達。它由兩個獨立的模組( 收發器 和 掃描器 )組成,它們采用同軸設計順序封裝。在收發模組中,PLD發出的脈沖激光由傾斜鏡引導,並使用非球面透鏡將光準直朝向掃描器和遠場。在遠場擊中物體後,返回的訊號光束進入同一個透鏡並聚焦到 APD 上。透過計算發射和接收脈沖之間的飛行時間來測量距離。 (請註意,反射器旨在最佳化整體收發器效率。由於發射和接收光束的數值孔徑不同,此反射器尺寸經過精心選擇,以反射大部份PL光,同時仍允許大部份接收光子擊中 APD)一個由兩個旋轉棱鏡組成的掃描器模組被用來將收發器的光束引導到不同的方向。有了這種基於棱鏡的分離式掃描器模組,我們不再需要將掃描功能和掃描視場與收發信機的定位聯系起來。由於這個原因,收發模組中的動態範圍要求得到了減輕;只需要在一個小的空間跨度內對收發包進行一次調整。
圖2(b)和2(c)顯示了棱鏡掃描模組的原型照片。它有兩個相對安裝的空心電機(無刷),是我們專門為該激光雷達設計的。兩個棱鏡與周期性拋光的釹鐵硼磁環相連,作為轉子被安裝在軸承孔內。外部定子線圈中的電流由各自的電機驅動器提供和控制,使棱鏡以所需的旋轉速度和相位旋轉,透過它掃描光束。
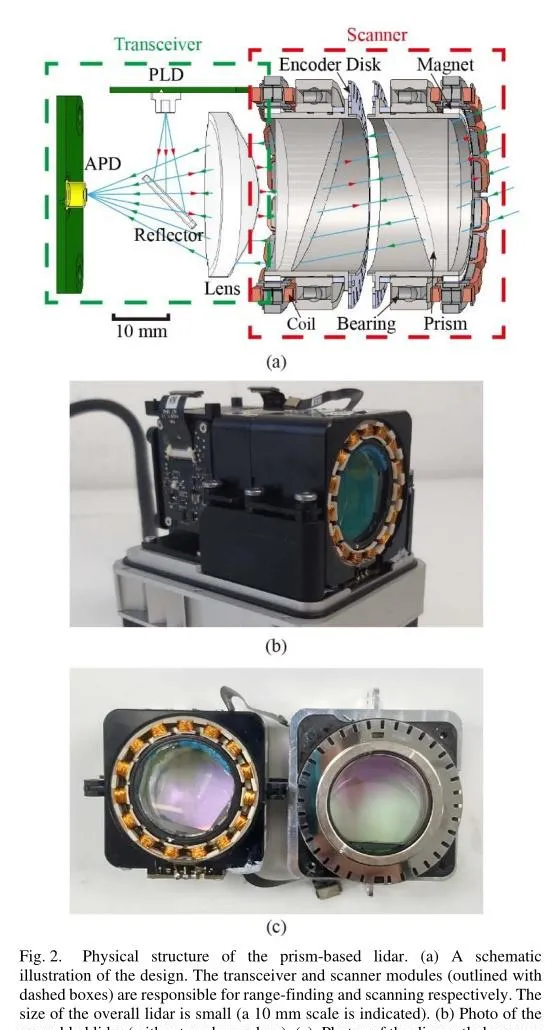 圖2、棱鏡激光雷達的物理結構。(a) 設計的示意圖。收發器和掃描器模組(用虛線框標出)分別負責測距和掃描。整個激光雷達的尺寸很小(顯示了10毫米的刻度)。(b) 組裝好的激光雷達照片(無外殼盒)。(c) 拆卸的掃描器模組的照片,包括電機、棱鏡和編碼盤。
圖2、棱鏡激光雷達的物理結構。(a) 設計的示意圖。收發器和掃描器模組(用虛線框標出)分別負責測距和掃描。整個激光雷達的尺寸很小(顯示了10毫米的刻度)。(b) 組裝好的激光雷達照片(無外殼盒)。(c) 拆卸的掃描器模組的照片,包括電機、棱鏡和編碼盤。
盡管實際的光束角度計算是透過精確的折射計算完成的,但為了更直觀的理解,掃描過程可以用旁軸近似法來理解[9],[18]。無論入射方向如何,單色光束都會被棱鏡以線性方式折射,我們可以認為光束方向被每個靜態棱鏡的固定角向量所偏轉(圖3(a))。兩個棱鏡的折射率和楔形角是相同的,這意味著兩個向量的大小是相等的。棱鏡圍繞共同的中心軸旋轉會導致這兩個等量向量的旋轉(圖3(b, c))。掃描圖案是這兩個異步旋轉的向量相加的結果。如圖3(b)所示,當它們彼此相對運動時, 凈向量 指向FoV的中心,而當它們彼此平行運動時,凈向量落在FoV的邊緣。一般來說,人們可以存取FoV內的任何目標向量,如圖3(c)所示。根據兩個旋轉速度之間的差異,光束將以螺旋模式或玫瑰花圖案掃描,如圖4(a)和圖4(b)所示。事實上,密度分布是這種掃描的一個通用特征,它不依賴於相對旋轉方向,在下一節中會有分析說明。為簡單起見,我們在原型中使用玫瑰花結配置。
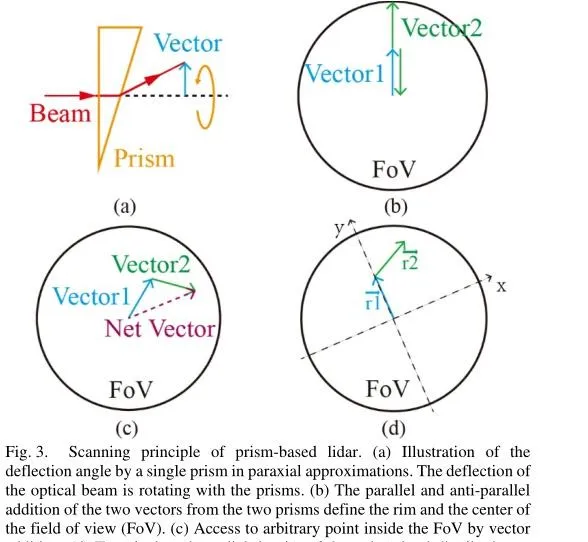
圖3、棱鏡激光雷達的掃描原理(a) 單棱鏡在近軸近似中的偏轉角圖示。光束的偏轉與棱鏡一起旋轉。 (b) 來自兩個棱鏡的兩個向量的平行和反平行相加定義了視場 (FoV) 的邊緣和中心。(c) 透過向量加法存取 FoV 內的任意點。(d) 為了計算點雲分布的徑向密度,為簡單起見,使用局部座標與\overrightarrow{r 1}
(第一棱鏡向量)對齊。
透過精心設計的磁性預載和質素平衡,每個轉子能夠快速可靠地旋轉至12000 rpm。雖然電機/激光雷達的總體尺寸保持最小,但這種設計中的光學孔徑尺寸可以保持盡可能大(圖2),以最大化接收器訊噪比,從而提高探測範圍效能。這是透射棱鏡代替雙軸旋轉鏡掃描器的另一個優點;對於相同的光學孔徑,尺寸顯著減小。由於905nm激光器滿足一級激光安全要求,對於反射率為80%的物體,我們器材的探測距離為260米,在陽光直射(100Klux)下的誤報率低於0.01%。探測距離可達到500米,形狀系數略有增加。掃描模組還確保了高可靠性,因為旋轉部件是光學棱鏡和無源機械附件,沒有任何電氣連線,避免了旋轉電子器材(例如滑環或多線激光雷達中的無線傳輸裝置)容易發生故障。
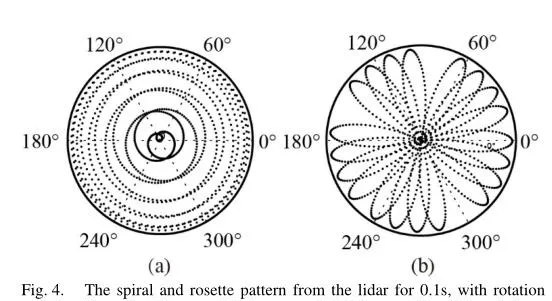
圖4、 0.1s激光雷達的螺旋和玫瑰花圖案,使用較小的旋轉速度(7294 rpm 和 6664 rpm,圖(a))和使用較大的旋轉速度(7294 rpm 和-4664 rpm,圖(b) ))
B. 類似視網膜的掃描模式
可以從Risley棱鏡激光雷達獲得自動機器人有趣且實用的功能。值得註意的是,在這個激光雷達中,點雲密度分布變得類似於視網膜。我們以合理的累積時間模擬了圖 4(b) 中點雲的角密度分布(圖 5(a) 中的紅色曲線),發現密度分布類似於人視網膜中的錐體(感光器)分布,其中心部份(中央凹區域)的峰值是視力最好的位置(藍色曲線代表圖 5(a)中人眼的視力)[19],[20]。這是一個有趣的功能,它允許我們設計類似眼睛的傳感機制,如範例部份所示。
掃描密度的中央凹狀分布是這種掃描方法的一個通用特征,與特定的模式(即旋轉速度)無關,可以用分析法得出。如果我們以相對較長的周期進行掃描,那麽只有徑向分布是有意義的,因為掃描在極方向是對稱的。由於測距測量是以恒定的速率進行的,密度與指向向量在徑向位置停留的時間成正比。因此,在圖3(d)中,我們可以指定y軸與第一個棱鏡向量對齊,而第二個棱鏡向量將以一個角度\left(\omega_{1}-\omega_{2}\right) \cdot t ,表示兩個棱鏡向量在時間t的角位移(圖3(d))。最終的向量可以透過投射到x 和y 座標上來表示。
\begin{aligned} \vec{r}=& \overrightarrow{r_{1}}+\overrightarrow{r_{2}} \\ \vec{r}=& {\left[R\left(1+\cos \left(\omega_{1}-\omega_{2}\right) \cdot t\right)\right] \hat{y}+} \\ & {\left.\left[R \sin \left(\left(\omega_{1}-\omega_{2}\right) \cdot t\right)\right)\right] \hat{x} } \end{aligned} \quad\quad \quad\quad(1) \\
其中R 是棱鏡向量的大小。這個方程式為
r=\sqrt{2} R \sqrt{1+\cos \left(\left(\omega_{1}-\omega_{2}\right) \cdot t\right)} \quad\quad \quad\quad(2) \\
徑向密度與r相對於時間t的導數成正比。
\begin{aligned} \frac{d r}{d t}=&-\frac{R^{2}\left(\omega_{1}-\omega_{2}\right)}{r} \sin \left(\left(\omega_{1}-\omega_{2}\right) \cdot t\right) \\ & \sim R\left(\omega_{1}-\omega_{2}\right) \sqrt{1-\frac{r^{2}}{4 R^{2}}} \end{aligned} \quad\quad \quad\quad(3) \\
獨立於t ,正如我們對靜態分布的預期。徑向密度ρ ,可以得出,
\rho=\frac{N \cdot d t}{2 \pi r \cdot d r}=\frac{N}{2 \pi R\left(\omega_{1}-\omega_{2}\right)} \frac{1}{r \sqrt{1-\frac{r^{2}}{4 R^{2}}}} \sim \frac{1}{r \sqrt{1-\frac{r^{2}}{4 R^{2}}}} \quad\quad \quad\quad(4) \\
其中 是測距的速率。 的分析運算式繪制在圖5(b)中。分析結果與模擬結果(圖5(a))和實驗結果(圖14(a))非常吻合。
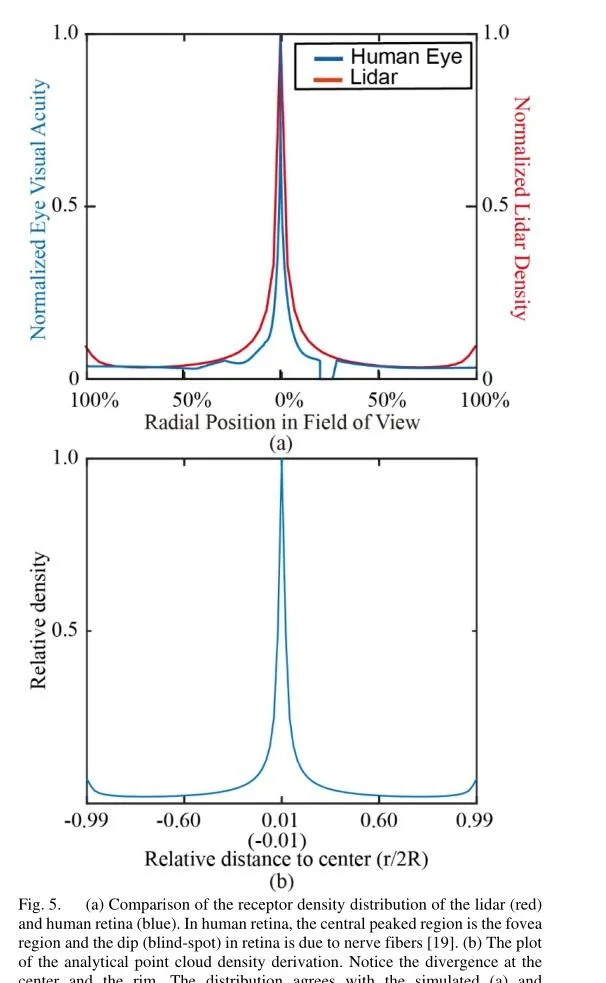
圖5. (a) 激光雷達(紅色)和人類視網膜(藍色)的受體密度分布比較。在人類視網膜中,中央峰值區域是中央凹區域,視網膜中的凹陷(盲點)是由於神經纖維[19]。 (b) 分析點雲密度推導圖。註意中心和邊緣的分歧。該分布與模擬(a)和實驗分布(圖14(a))一致。
C. 不可公度的掃描模式
非重復模式是這種激光雷達設計的自然結果,可以提供對環境的高分辨率描述。圖6(a-d)顯示了這種掃描在室外場景中的演示。隨著掃描時間從0.2 秒增加到 40 秒,3D 檢視獲得了更高分辨率的覆蓋範圍(參見附錄 E 中的定義)。圖 6(e) 顯示了作為時間函數的覆蓋百分比,在前 0.3秒和0.8秒內分別達到 50% 和 90%,並且在更長的時間內達到更高。需要了解這種非重復行為。為了使重復發生,下列方程式應同時滿足,
\omega_{1} \cdot T=n \cdot 2 \pi \quad\quad \quad\quad(5) \\ \omega_{2} \cdot T=m \cdot 2 \pi \quad\quad \quad\quad(6) \\
其中T 表示第一次重復發生的時間,\omega_{1}, \omega_{2} 分別是兩個棱鏡的旋轉速度。符號m 和n 表示整數。
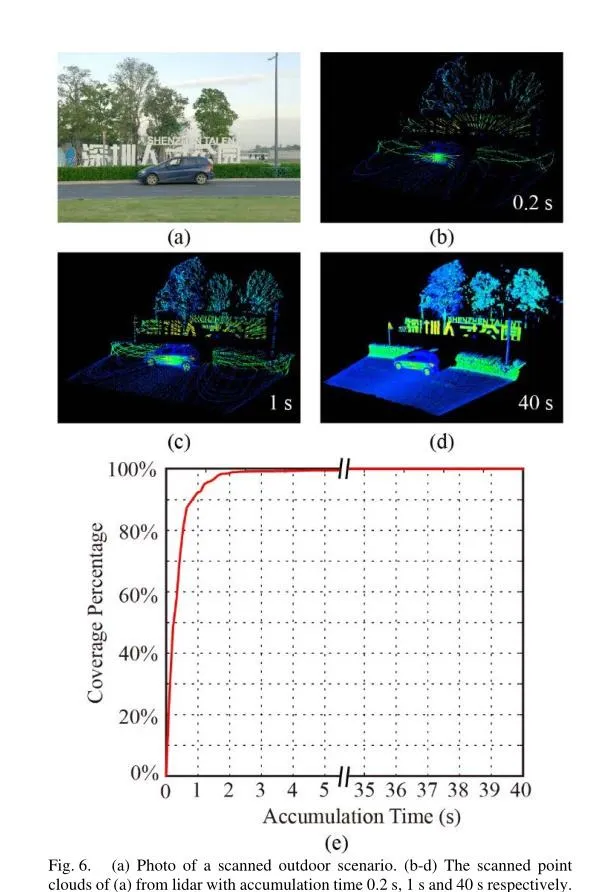
圖6、 (a) 掃描的室外場景照片。 (b-d) 來自激光雷達的 (a) 掃描點雲,累積時間分別為 0.2 秒、1 秒和 40 秒。顏色代表物體的反射率。 (e) 作為累積時間函數的 FoV 覆蓋率。
透過這兩個方程式作商,我們的意思是,如果存在任何重復,兩個棱鏡的旋轉速度需要是可公度的[21],也就是說,該比率是一個有理數,用n/m表示。透過這兩個方程式做比,我們得到
\frac{\omega_{1}}{\omega_{2}}=\frac{n}{m} \quad\quad \quad\quad(7) \\
這意味著如果存在任何重復,兩個棱鏡的旋轉速度需要是可公度的[21],也就是說,該比率是由n/m 表示的有理數。雖然該等式似乎總是滿足的,因為在電子電機控制中只能設定w_{1} 和w_{2} 的有理數,但在實際情況中很少發生重復。這是因為由於電機控制反饋系統中的各種幹擾(環境幹擾、傳感器雜訊、控制誤差等), w_{1} 和w_{2} 總是具有小的不確定性。即使是相對較小的不確定性,也足以打破可公度性,形成不重復的格局。如果系統中不存在無源雜訊,有時可以考慮有源雜訊註入。對於典型的1%高斯雜訊,我們進行了模擬,以發現對於不同的旋轉速度,掃描在多長時間內將達到FoV中90%的覆蓋率,如圖7(a)所示。圖7(a)中大多數深藍色參數空間對於非重復模式是理想的,這與不存在雜訊的可度量(重復)情況(圖7(b))形成了鮮明對比。
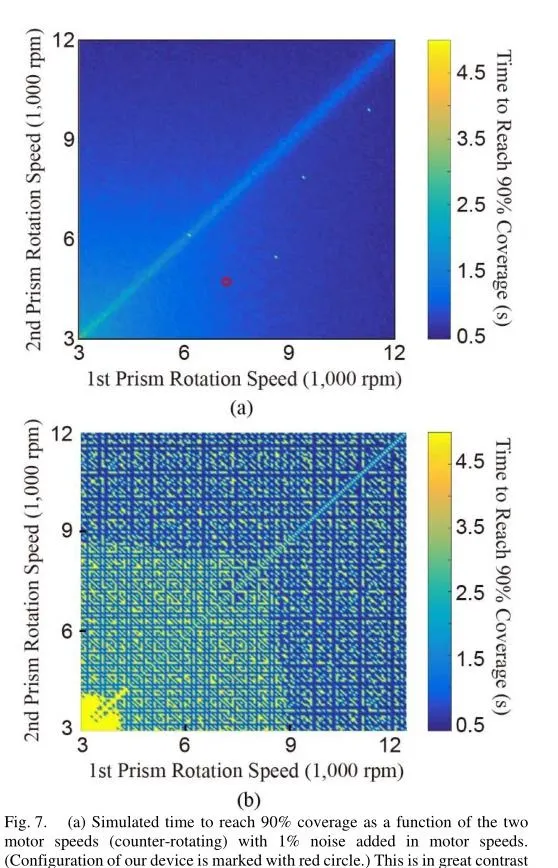
圖7、(a) 達到90%覆蓋率的模擬時間作為兩個電機速度(反向旋轉)的函數,電機速度增加了1%的雜訊。(我們器材的配置用紅色圓圈標記。)這與沒有噪音的情況(b)形成了鮮明的對比。色階上限為 5 秒。 (b) 達到 90% 覆蓋率且電機速度沒有噪音的時間。
D. 點密度和視野的效能升級
這種激光雷達設計的另一個優點是易於提高效能,例如增加掃描密度和客製FoV。在傳統的機械激光雷達中,點密度和視場的改進需要放置許多額外的收發器對,並且由於動態範圍問題,這一困難顯著增加,如第 II 節所述。在基於棱鏡的設計中,由於收發模組和掃描模組的分離,改進更加容易。
1)透過封裝陣列提高掃描密度
我們可以使用PLD和APD陣列來提高掃描密度,而不是在各自的封裝中只使用一個PLD和一個APD。與傳統機械激光雷達難以手動對準不同,封裝技術很容易實作這一目標。新跨度(收發器半導體封裝尺寸約3mm)比多線設計中的空間跨度(約5cm或更大)小一個數量級。跨度尺寸的減小大大降低了對動態範圍的要求。圖8(a)示出了分別包含6個PLD和6個APD的半導體管芯的原型中使用的實際封裝。半導體定位區域具有大約3mm的尺寸,並且組裝過程透過現成的商業封裝器材自動化。透過將原始設計中的單芯片封裝替換為這些陣列封裝,點密度立即提高了六倍,如果需要高分辨率,這將顯著減少掃描時間。我們在圖8(b)和8(c)中顯示了來自這些陣列的螺旋和玫瑰圖案的例子。人們可以容易地以高精度、速度和產量擴充套件到封裝中的更多管芯。增加的密度提供了優越的密度和效能,這在自動駕駛汽車中尤其有用。因此,與具有相似點密度的現有多線激光雷達相比,成本有望顯著降低。
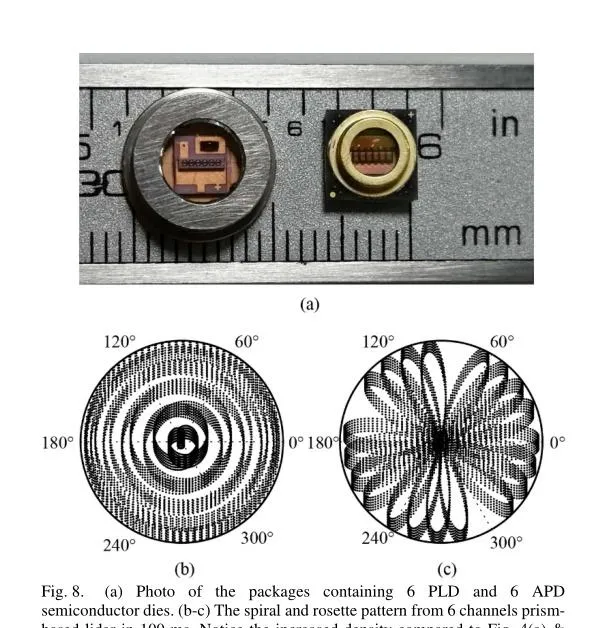
圖 8、(a) 包含6個PLD和 6 個APD半導體裸片的封裝照片。 (b-c) 6 通道棱鏡激光雷達在100毫秒內的螺旋和玫瑰花圖案。請註意與圖 4(a) 和 4(b) 相比增加的密度。
2)具有同時控制棱鏡的客製FoV
在許多機器人套用中,如高速自動駕駛汽車,需要接近矩形FOV。在水平方向上,激光雷達應覆蓋盡可能大的水平FOV,以感知周圍環境和事件。然而,垂直FOV不需要很大,因為地面或天空中沒有很多特征。在這方面,圓形FOV可能不是這種情況下的最佳選擇。應考慮在水平方向上增加FOV,同時限制垂直方向上的FOV。

圖9、用三個旋轉棱鏡進行近似矩形掃描的說明。(A) 三個棱鏡的配置,其中P1和P2被同步控制,因此它們的相位正好相反。P3是獨立驅動的,偏轉5的振幅較小,旋轉速度較低。(B) 旋轉的說明。P1和P2以相同的速度向相反方向旋轉。相位差由驅動器精確控制,使凈向量成為沿x方向的諧波振蕩器。額外的P3進一步旋轉這個凈向量,以形成一個近似於矩形的FoV。(C) 用這種方法的最終掃描圖案。這裏使用了6個元件的封裝(圖8(a)),以增加密度,更好地滿足自動駕駛汽車的要求。
基於prism的方法確實提供了這種能力。如圖9(a)所示,可以設計三棱鏡掃描來實作這個目標。前兩個棱鏡的楔角和折射率相同,並且被同步控制,使得它們的旋轉角彼此完全相反。這種驅動方法將來自這兩個棱鏡的凈偏轉向量約束為沿x軸的諧振子(圖9(b))。第三棱鏡以較小的振幅和較慢的速度被獨立驅動,以有效地以較低的頻率迴圈旋轉該振蕩器向量,並有助於接近矩形的FoV。圖9(c)中提供了掃描範例,其中水平糊垂直FoV分別為81.7°和25.1°。在這個例子中,6元件封裝垂直放置,以增加密度,更好地滿足自動駕駛汽車的要求。這一設計促成了Livox科技公司開發的產品,被稱為Horizon。
隨著封裝的多收發器陣列的密度增加和多棱鏡的新穎控制,為這些高要求的套用提供了具有成本低、尺寸小、可靠性和效能優點的通用方法。在下一節中,我們將介紹我們器材的詳細規格,並說明它們在自動駕駛汽車關鍵任務中的範例性套用,如機器人導航、地圖繪制、物體檢測和跟蹤。
IV. 套用
A.激光雷達和IMU的校準
傳感器校準通常是機器人學中的關鍵步驟,座標的輕微不匹配可能導致不準確或錯誤的融合,並破壞系統的安全性。不可公度掃描在激光雷達和其他傳感器之間的外部校準中是有價值的。由於分辨率有限,傳統的多線激光雷達[22]通常會導致垂直方向的校準不準確;由於稀疏性,沿著垂直方向可靠地匹配兩個掃描是困難的(圖10(a))。為了解決這個問題,通常需要連續移動激光雷達[23]-[26]。然而,這使問題變得復雜,因為耦合運動估計可能會引入額外的誤差,如運動失真[25]、[27]。給定合理的累積時間(圖10(b)),不可公度掃描顯著地增加了點雲的密度,使得能夠在沒有運動的情況下在多個靜態姿態下精確地校準激光雷達外部參數。
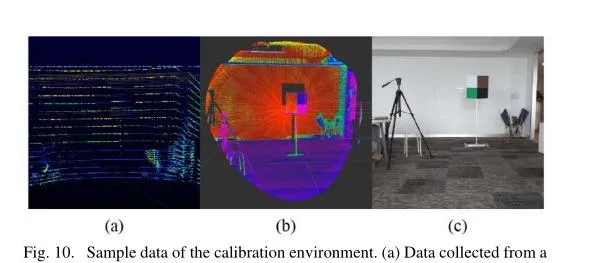
圖10、校準環境的樣本數據。(a)從傳統的16線機械激光雷達收集的數據(b)從我們的激光雷達收集的數據(c)實際環境。
在本實驗中,我們以激光雷達和IMU(慣性測量單元)的校準為例,圖11(a)顯示了安裝在機器人地面車輛上的激光雷達-IMU傳感器組。傳感器組旋轉大約10度,並且在所有6個自由度(DOF)中從其原點平移0.10米。在每次旋轉/平移中,傳感器組在該姿態保持靜止10秒,導致99.73%的覆蓋率(見圖6(e))。基於密集點雲,然後透過基於正態分布變換(NDT)方法[32]匹配兩個相應的掃描來確定激光雷達相對變換,盡管也可以使用各種其他方法,例如叠代最近點(ICP)匹配[28]、[29]、非剛性點配準[30]和基於特征的配準[33]、[34]。
另一方面,IMU相對變換是透過對陀螺儀和加速度計分別測量的角速度和線加速度進行積分來確定的。IMU的偏差在每個靜態位姿期間被估計,並且在兩個連續位姿之間的運動期間被線性內插。利用透過激光雷達點雲配準和IMU整合確定的相對位姿,外部參數的確定是標準的手眼校準問題,並透過[35]、[36]中的方法解決。
我們透過將其投影的lidar變換與地面真實情況進行比較來評估校準的外部因素,地面真實情況是透過記錄累積了足夠長時間(例如,200秒)的各個點掃描來確定的。假設校準的外部參數是X ,兩個位姿之間的地面真實激光雷達變換是A ,並且從IMU數據積分的變換是B ,則誤差度量被定義為
\operatorname{err}=\left\|\log (A)-\log \left(\bar{X} B \bar{X}^{-1}\right)\right\| \quad\quad \quad\quad(8) \\
其中Log是SE(3)上的對數函數,並且將SE(3)中的元素變換為se(3)。
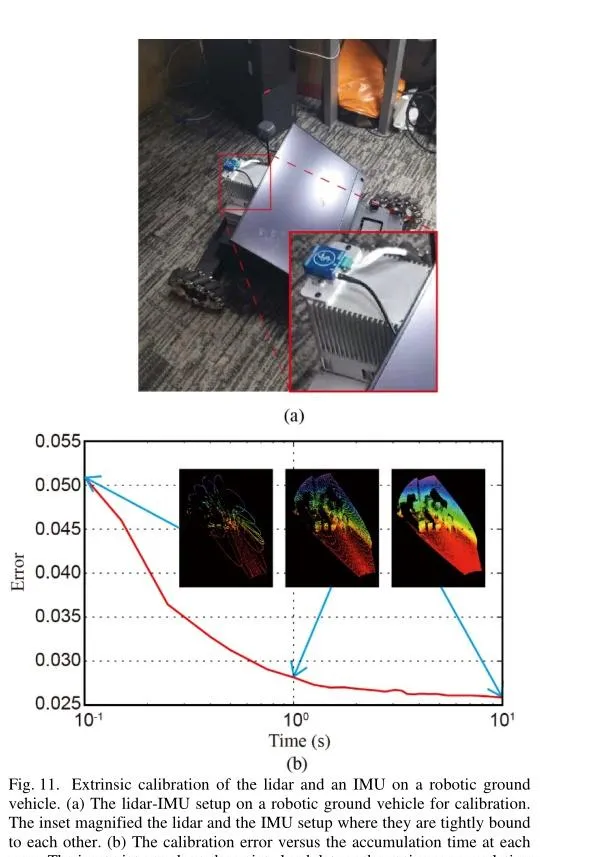
圖11、機器人地面車輛上激光雷達和慣性測量單元的外部校準。(a)用於校準的機器人地面車輛上的激光雷達-IMU設定。插圖放大了激光雷達和IMU的安裝,它們彼此緊密相連。(b)每個位姿下校準誤差與累積時間的關系。插圖顯示了校準過程中不同累積時間的點雲數據。
當使用不同的累積時間校準外部參數時,我們計算誤差,並且對於許多不同的位姿對平均誤差。結果如圖11(b)所示。可以看出,隨著累積時間的增加,由於更高的激光雷達分辨率,校準誤差如預期的那樣單調減小(圖11(b),插圖)。誤差在第一秒迅速下降,然後下降較慢,與圖6(e)中的覆蓋百分比非常一致。不可公度掃描帶來的改進可以從誤差減少中清楚地看到。更復雜的任務,例如相機-激光雷達校準和多激光雷達校準也可以受益於相同的原理。推廣到更短的累積時間甚至即時也是可行的[25],[38]。
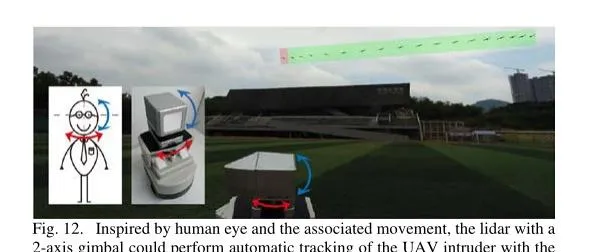
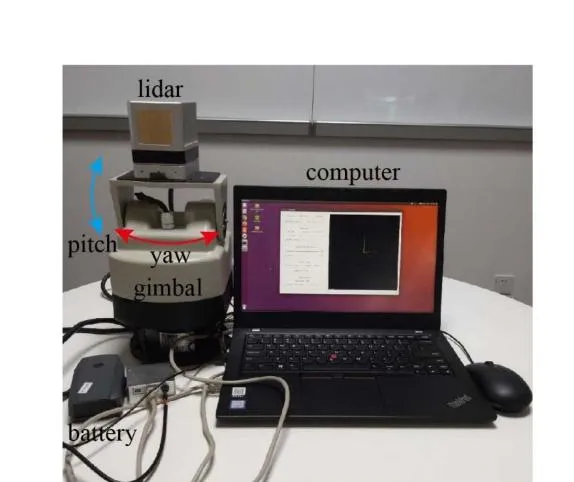
圖12、受人眼和相關運動的啟發,帶有2軸雲台的激光雷達可以自動跟蹤具有中央「中央凹」區域的無人機入侵者。粉色高光區域是第一次檢測發生的地方,而綠色高光區域表示主動跟蹤階段。

圖13、(a-f) 由 RGB 相機捕獲並由激光雷達 (d-f) 檢測到的入侵者(a-c,僅視覺引導)。對激光雷達數據的入侵者檢測是線上自動計算的。插圖顯示了放大的圖片,以便更好地說明。
B.入侵無人機檢測與跟蹤
在透過外圍區域成功檢測到物體後,透過眼外肌、頸部或身體轉動眼睛,以將物體的影像投射到高分辨率視網膜中央凹區域上,並允許其跟蹤和辨識[20] (圖12的插圖)。受此啟發,激光雷達可以增加一個兩自由度的萬向節系統,用於類似眼睛的機器人物體檢測和跟蹤(有關所開發系統的詳細資訊,請參見附錄F)。作為一個概念驗證演示,考慮一個無人機(無人機)入侵者的檢測和跟蹤。我們首先凍結萬向架,透過手動水平飛行無人機入侵者透過激光雷達視場的中心來檢查無人機的探測。在整個飛行過程中,無人機一直被探測到(圖13(a-f)),甚至有時只有相對較少的點被探測到(圖13(d,f))。在FoV的不同位置從UAV探測到的點的數量(圖14(a))與來自理論分析的lidar點密度分布(圖5(a))非常一致。為了利用激光雷達「中央凹」區域的高密度並獲得物體的高清晰度感知,我們根據入侵者UAV的反饋位置驅動萬向節的兩個馬達(圖12)。有了反饋控制器,一旦物體出現在視野內,激光雷達就可以快速跟蹤具有「視野」區域的入侵者(圖12,電影S1)。跟蹤時間和精度如圖14(b)所示,在我們的實驗中主要受萬向節電機效能的限制。利用來自激光雷達的入侵者位置資訊以及萬向架馬達角度反饋,可以計算入侵者的飛行軌跡(圖14(c)),這對入侵者管理的進一步行動是有用的。額外的攝影機(具有或不具有視網膜中央凹特征)可以與該激光雷達結合使用,以實作對入侵者的更準確的檢測和分類。相比之下,只有網絡攝影機的系統將無法探測無人機的距離和完整的軌跡。這種受生物啟發的機器人傳感系統的優勢可以為安全監控、工業監控和自動駕駛等廣泛的檢測和跟蹤套用提供極大的幫助。
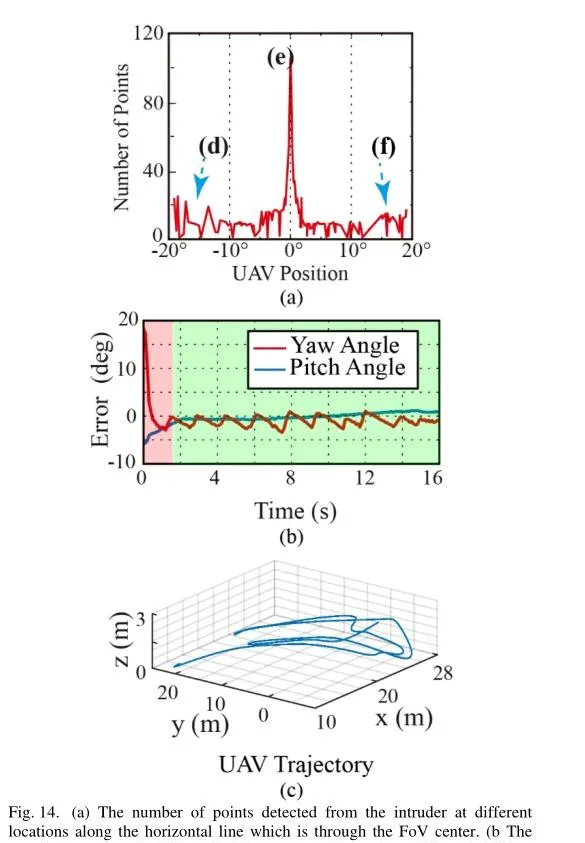
圖14、 (a) 在穿過 FoV 中心的水平線的不同位置從入侵者檢測到的點數。 (b 使用與圖12相同的標記顏色進行跟蹤的角度誤差。(c)使用激光雷達和雲台數據計算出的入侵者的飛行軌跡。
C. 自動駕駛汽車套用示範

圖15、激光雷達數據采集車。 (a-b) Livox Horizon激光雷達安裝在車頂 (c) Nvidia Xavier用於即時處理激光雷達數據。開發了一個客製板來為激光雷達供電並將其數據路由到 Xavier 進行即時處理。
在本節中,我們將展示我們的激光雷達在自動駕駛汽車中的適用性。我們使用名為 Horizon 的升級激光雷達配置,詳見第 III.D 節。
圖 15(a-c) 顯示了由用於數據采集的Horizon激光雷達、用於數據處理的Nvidia AGX Xavier2和用於數據路由的客製板組成的系統設定。我們展示了自動駕駛汽車中必不可少的兩個應用程式:目標檢測和跟蹤,以及激光雷達裏程計和建圖。每個應用程式的演算法詳述如下。這兩種演算法都在Xavier上即時執行。
1)物體檢測與跟蹤:
檢測程式由三部份組成,即檢測、分割和跟蹤。檢測部份使用端到端神經網絡[39]來提取、分類和預測感興趣物件的大小、位置和方向,包括汽車、公共汽車、卡車、行人、單車和摩托車。該網絡在專門為地平線激光雷達標記的專有數據集上進行訓練。第二部份,分割,基於點的高度和法向量分割地面點。然後將地面、前景和背景物體進行聚類,並與第一部份的檢測結果進行融合,產生更加可靠和準確的分割結果。最後,最後一部份,即跟蹤,基於前兩部份的檢測和分割結果,根據這些物件與上一幀的距離對當前幀中的每個物件進行配對,並透過卡爾曼濾波方法平滑每個物件的軌跡。最終結果可以在https:// youtu.be/sqYGFJVR1HU 的影片演示中看到。
2)激光裏程計和建圖(LOAM):
我們采用激光雷達裏程計和建圖演算法的地平線激光雷達[40]。在接收到一幀(即100ms)點雲後,該演算法提取邊緣和平面特征點,並將它們構建在局部地圖中,如論文[41]。此外,還添加並校準了IMU。在執行時,IMU數據按照[42]中的方式進行預整合,為特征點配準提供可靠的初始位姿估計。在https:// youtu.be/Aw7I6H7Wj1U .可以看到我們在城市和高速公路環境中的激光雷達裏程計和建圖演示。
V. 結論
基於棱鏡的掃描方法為機器人激光雷達傳感器提供了一種新的機制,盡管采用現有的為傳統多線激光雷達設計的演算法可能會出現問題。憑借安裝簡單、成本低、低輪廓和良好的穩健性,我們相信這種新的激光雷達設計將逐漸受到學術界和工業界的歡迎,新的自動機器人套用將透過類似視網膜的密度分布和無處不在的不可公度的掃描而得以實作。
附錄
A. 產品開發
基於這種激光雷達的設計,Livox科技公司開發了一系列產品,稱為Mid-40 ^{3} 、Tele-15 ^{4} (增加的密度和範圍)、Horizon ^{5} (增加的水平 FoV 和密度),價格在1000 美元左右或以下.
B. 激光雷達原型的詳細操作參數
範例掃描器由兩個相同的棱鏡組成,其折射率為1.51,楔角為18 度。轉速分別為 7294 rpm 和 -4664 rpm。我們器材中的實際光束指向方向由板載FPGA 根據棱鏡表面發生的折射即時計算,其位置由編碼器精確測量。收發器以100 kHz~300 kHz的恒定測量速率執行,每個步驟如下:
- 接收器被觸發並通電幾微秒。
- 有返回訊號,接收端接收訊號。內部時間數碼轉換器將飛行時間轉換為距離。
C. 覆蓋範圍的定義
為了定義某一時間段的LiDAR覆蓋範圍,FoV在水平糊垂直方向上被劃分為100段,理想情況下,總共有10000個立體像素。然而,由於圓形(非矩形)的FoV和與場景相關的限制,我們有7132個有效立體像素。如果激光束掃描到該立體像素並收集到一個點,該立體像素就會被視為被填充。假設在時間t,有n個立體像素被填充,那麽覆蓋率的公式是:
\text { coverage }=\frac{n}{7132} \times 100 \% \quad\quad \quad\quad(9) \\
D. 入侵無人機檢測與跟蹤
1)系統概述
我們的萬向節增強激光雷達檢測系統如圖16所示。萬向節系統是來自PTS electronics ^{6} 的「PTS-303H」。它具有兩個自由度:偏航和俯仰,分別由兩個高扭矩電機驅動。使用制造商提供的軟件 API,每個電機的轉速都是獨立指定的,這使得雲台可以指向不同的方向。我們開發了一個在主機 PC 上執行的整合軟件,用於處理所有激光雷達點雲數據(即用於入侵者檢測)、計算和生成雲台系統的電機命令(即用於入侵者跟蹤)並恢復入侵者在太空中的軌跡。 PC 和激光雷達之間的通訊是透過乙太網路進行的,而與雲台的通訊是透過UART介面進行的。
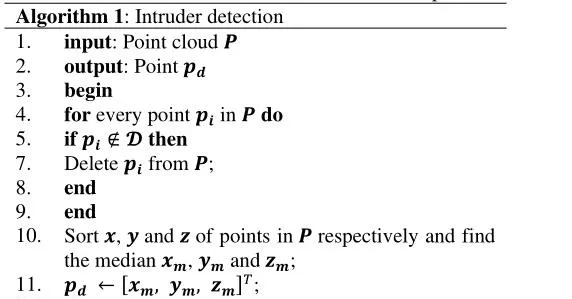
2)檢測演算法
演算法1總結了我們的檢測演算法。它以10Hz的頻率即時執行,每100毫秒將激光雷達點流分割成一幀(即 )。我們假設感興趣的空間被表示為 ,並且它不包含背景物體。那麽,如果 的任何一點位於 ,這是由入侵者無人機造成的,應該保留(第4-9行)。然後,透過計算中間座標(第10行),使用 中保留的點來估計入侵者的位置。與均值座標相比,我們使用的中值座標對 的異常點更穩健。
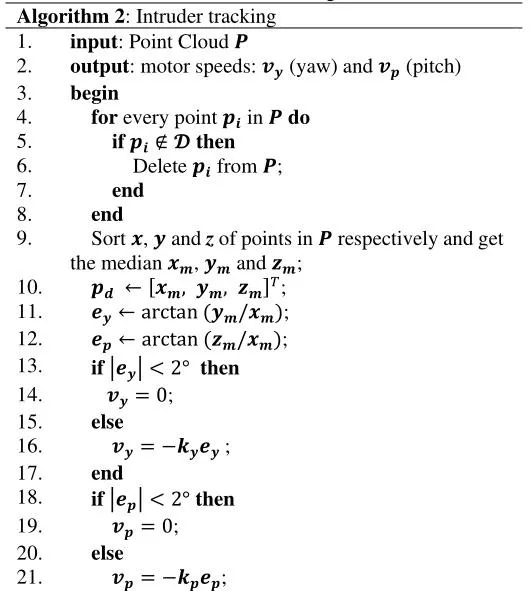
3)跟蹤演算法
演算法2總結了我們的檢測和跟蹤演算法。它首先像演算法1一樣執行檢測(第 3-10 行)以確定入侵者相對於激光雷達的位置(第 11-12 行)。如果相對位置低於閾值(例如 2°),則無需執行任何操作(第 13-14 行,第 18-19 行)。否則,電機速度將與相對誤差成比例設定(第 15-17 行,第 20-22 行)。註意這裏 指的是萬向節的局部幀。
4)萬向角度校準
前幾節中的檢測演算法確定入侵者相對於激光雷達的位置。為了恢復入侵者在空間中的軌跡(例如入侵者管理),還需要萬向節方向。不幸的是,萬向節軟件API無法提供這一功能。在我們的實驗中,我們透過跟蹤激光雷達點雲中的一個已知特征點(例如房間角點)來校準框架的旋轉速度。校準建立一個尋找表,將命令對映到實際轉速。然後在實際的入侵者跟蹤過程中,根據命令確定旋轉速度,然後進行積分以產生角度估計。











