@ Yifan Hou 说得非常对,基于关节电流环的反馈基本只适合于直驱无减速器的机器人,学术上现在很少看到基于电流环反馈估计力矩的文章了(印象中看到最新的一篇相关文献是八十年代的),原因@ Yifan Hou 也分析得也很仔细。
当然,通过电流反馈做一些很粗糙的力估计(比如 @ robotopia 所说的触停)理论上还是可行的,但它有一个小缺陷。
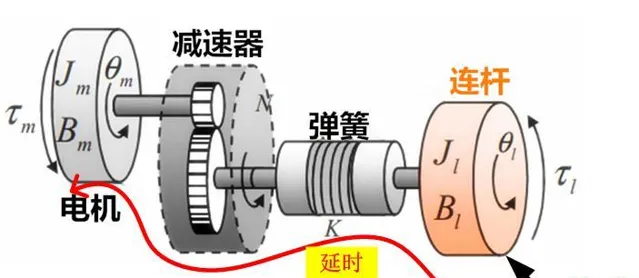
上图是机器人一个关节的模型简图,由于谐波减速器等的柔性,导致在整个传动链中,相当于有一个弹簧K。当我们在负载连杆端施加外力时,由于弹簧的缓冲作用,这个外力反向传输到电机端,并被电机感知时,必然会有延时和衰减。若外界冲击特别大,这种延时可能会让电机不能及时停止,而产生危险。
机器人中的力传感器主要分为两类:关节部位的单轴扭矩传感器和机器人末端的6轴力传感器。第一类传感器价格并不算很贵,而且国产的一些性能也不错,我们这边都是买的一家国内公司的,量程50Nm的5000左右,跟HD的谐波减速器价格相当;而第二类就非常昂贵,稍微好点的就得4,5万,没有什么好的国产替代品。第二类我们没有适应经验,这里主要分享下第一类的使用情况。
我们知道,现在伺服系统中的位置传感器精度非常高;然而力矩传感器远没有位置传感器那样,我们买的精度大概为0.2Nm。据文献中报道,他们的力矩传感器信号标准差为0.35Nm,根我们的精度差不多。

另外,机器人中安装有力矩传感器,还有一个更致命的缺陷:刚度大大降低。上图是我们装了力矩传感器的电机,圆圈内的即为传感器,它测量力矩的基本原理是内外圈之间有形变(类似于弹簧)。再联系最上面一幅图,当系统中装有力矩传感器后,传动链上会有明显的变形,也即系统的刚度相比于没有力矩传感器的,会下降很多。经过粗略计算,一块与力矩传感器大小一样的钢板,其刚度是它的近10倍。
我们知道,传统机器人在做位置控制时,是希望传动刚度伟大越好的(比如机床)。当刚度过低时,不光是控制精度下降,系统也容易不稳定。
接下来,我们实际看下力矩传感器信号如何。我们只控制电机端完成一定的位置轨迹追踪,同时测量出力矩传感器的信号。
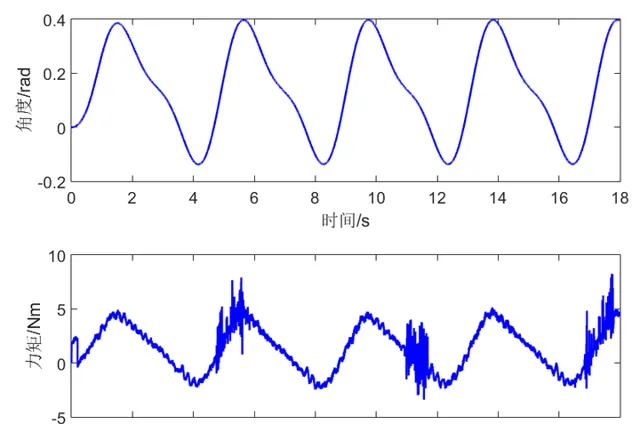
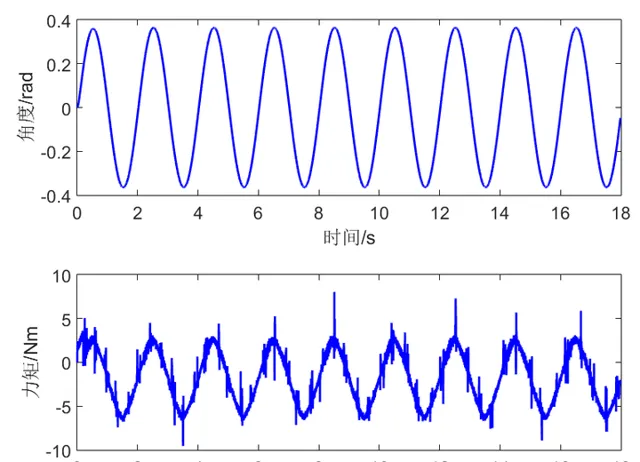
可以看出,信号质量并不是很好,这跟系统刚性下降有关。回到第一幅图,电机端的运动,经过中间的弹簧后,再传到连杆端;由于弹簧刚度系数较其他部分小很多,导致电机运动经由弹簧后产生了波动,进而导致电机与连杆间的偏差角有波动,最终使得测量的力矩不够稳定。这种不稳定的力矩信号,直接用来做力估计与力控制也是不切实际的。
电流环反馈实际应用前景有限;
力矩传感器的引入会降低系统稳定性;
单靠力矩传感器做力控制效果不佳;
现在一般是通过双编码器加力矩传感器来做精密力控制;










