2020年自动驾驶地图形态发生了变化,仍然重要但角色不同了。作为一个高精度地图相关经理,曾经也处理相关公司的资本收购和技术开发业务。这里讲一下。
首先梳理一个先导问题:导航地图对自动驾驶有多重要?
这个问题很好回答,你现在不开车机,不开手机,请从你的所在地开到北京王府井大街。嗯
估计在目前这社会,也就那可能(2%不到的)路上老的哥,还知道这个世界上有指路牌这个东西,大部分司机估计分分钟被教做人。
很显然, 人做不到的事情,别指望自动驾驶能够做到 ,自动驾驶领域,放很长一段时间这句话都适用,那ok,SD图对自动驾驶车是需要的。
然后梳理题主的问题:高精地图对自动驾驶有多重要?
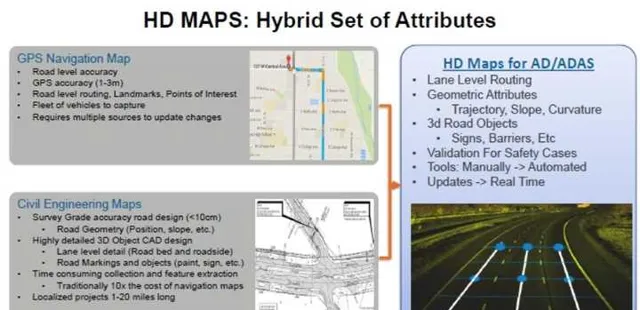
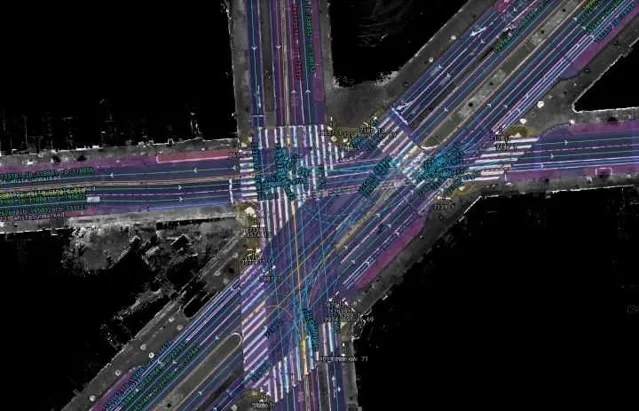
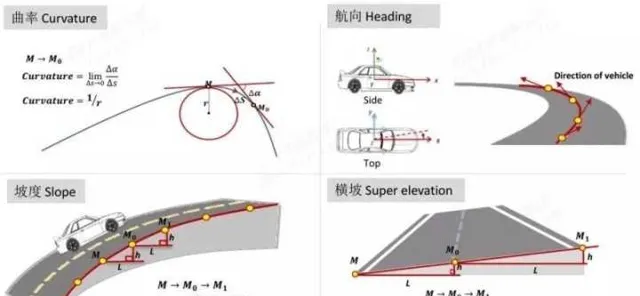
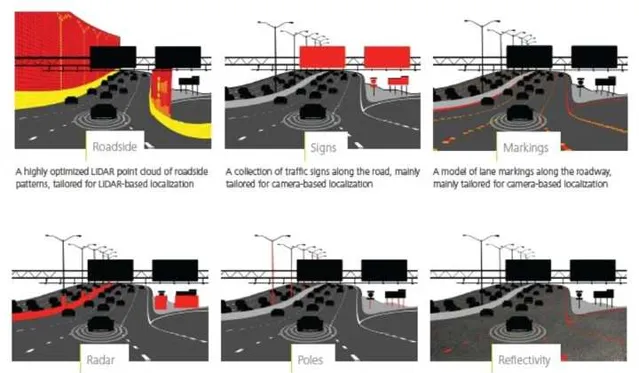
目前大家理解的高精度地图,是这样的
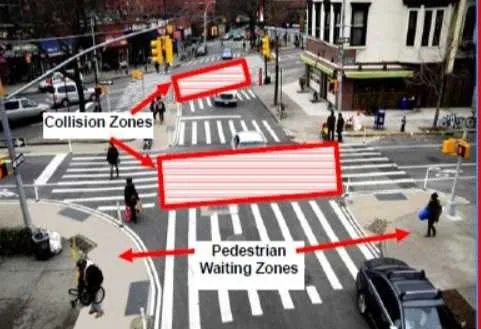
我们继续刚才的思考实验,那这种级别的地图对人类司机来说重不重要?它相当于人类驾驶过程中的地图,应该类似这样

这是不是很重要? 算有点重要,但已经不是这么重要了 。因为如果你是自己非常习惯的通勤道路,没事,估计99%的朋友,不要导航地图就能够解决。但如果是第一次,在没有这种高精度图片的导航下,你可能有20%的可能性,没有提前并道,或者转弯有多个入口的时候,一不小心进错口了。这些场景下,高精度地图发挥了作用。这里强调下,目前这些都是针对人类这个水平的能力进行评估的。
除了刚才这些场景,地图似乎不被需要,但放在自动驾驶高精度地图上来看,情况并不是这样。
实际上如果用一个公式精练各种语言描述的话:

实际上高精度地图和感知在很大一个区间是互补关系。另外还有一层关系是最近几年才逐渐被大家认同的,他们是相互依赖的关系,这就需要提出 众包地图的概念了。
高精度地图本质是人类的行驶记忆
如果你开车觉得对路况熟悉非常关键,那高精度地图就非常关键。
用普通用户的话说: 如果我经常开的路,我记得,那我不需要高精度,甚至不需要导航。
从自动驾驶算法角度来说: 对某一个时刻,不同空间上的信息进行获取合并,我们叫特征提取与融合。也就是那个时刻,我看到了什么。把这个时间尺度拉长到10秒,继续合并信息,我们叫局部场景重建,也就是我这10秒,大概掌握了附件哪些状况(灯要变红,车要cutin),再把不同司机,更长时间的数据进进一步的进行合并就是众包地图了。
如果地图可以认为是人类的形式记忆,那它的外延就非常宽泛了
目前大家对于地图的理解:



后面地图可以包含更多的内容:
有些由于定位的传感器信息,也有可能直接被存储在地图中,用于传感器需要,但人类并不一定需要的应用当中。
地图未来的表征形式也在发生着巨大的变化
一种是记忆网络对于高精度地图普通表征的部分替换,规避了经纬度这种概念,和固有的地图组织形式
另一种是对固有地图组织形式的改变,利用图神经网络,将其进行编码,方便更多网络类感知算法的介入。

地图使用的后续问题
地图本身是一个非常大的课题,包括地图引擎的设计,地图云端数据的计算和成图流程,质保体系设计,中国的地图资质问题等。如果大家有兴趣,我写了一些专题文章,大家可以阅读下。
欢迎关注我的专栏,与其他作品
深度学习入门(1)-我是一个渣男我是一个渣男,有着丰富的阅女经历,然而女孩子实在过于复杂,不好好思考总结已经不足以支持我稳定的发挥,因此我决定拿起「深度学习」的工具来「深度学习」下女孩的心思,为了成为一个更好的PUA,呵呵呵。 如何要成为一个有「方法论」的PUA,核心便是要练…
关注我,听祖孙三代汽车人聊聊汽车的传承与改变!











