决策和规划一般是联系到一起的。
首先介绍目前自动驾驶规控的两种软件框架,然后对后续内容做一个目录大纲展示。
0. 自动驾驶的软件系统的框架
目前有两种:
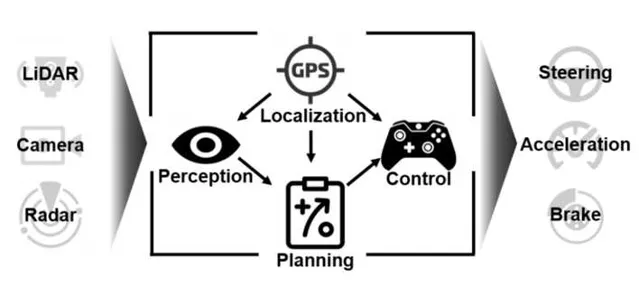
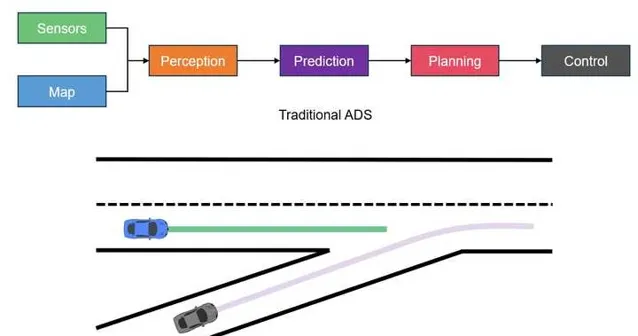
0.1 模块化的思路
输入:lidar\camera\radar
中间算法:perception\localization\planning\control
输出:steering\acceleration\brake
优点:过程可控,方便理解。
缺点:长尾问题不好解决,随着长尾问题的解决,架构变得冗余。
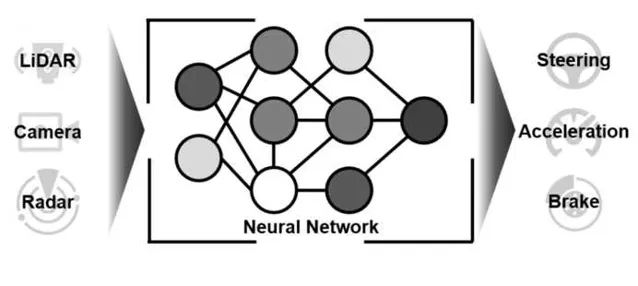
0.2 端到端范式
输入输出不变,中间过程用神经网络来代替。
优点:信息的无损传递
缺点:每个子任务传递的信息不可解释,训练要求的样本数量多,如果场景没有训练,其泛化性不确定。
个人观点:未来一段时间内,是端到端范式和传统rule-base相结合的一种方式,优劣势互补。
规控课程的目录结构
1. 基础的规控算法--求解子问题的工具
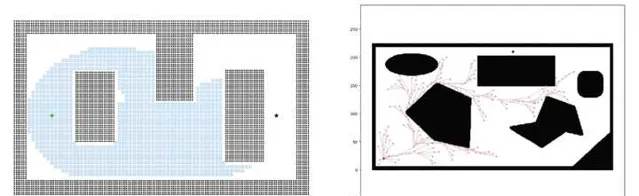
1.1 搜索的方法
比如:Dijkstra/A*/DP
1.2 随机采样的方法
比如:PRM/RRT/RRT*/CLRRT
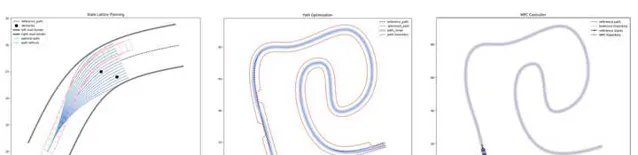
1.3 基于运动学的方法
比如:Hybrid A*(基于运动学的搜索)/State Lattice(基于运动学的采样)
1.4 基于数值优化的方法
比如:QP/iLQR
1.5 控制领域常用的方法
比如:PID/LQR/MPC
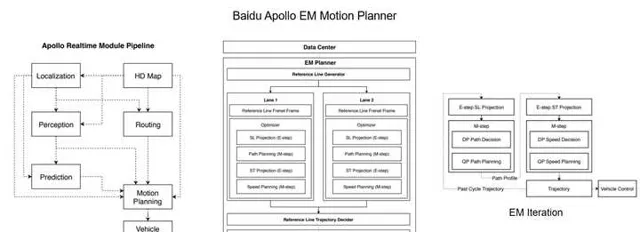
2. 决策规划的算法框架
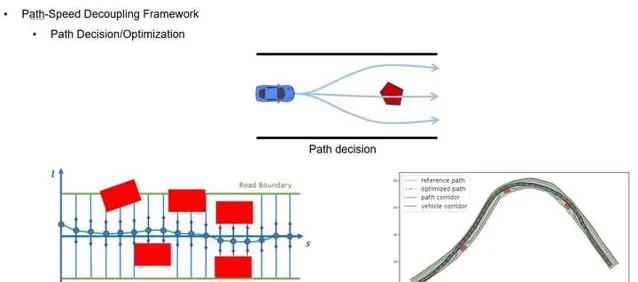
2.1 路径-速度解构的框架
目前很多公司使用的方式
将三维问题解耦成两个二维问题
分Decision和Optimization,通过Decision把直接求解的非凸问题变成凸问题。
path可以基于frenet坐标系也可以基于笛卡尔坐标系求解
如何让path=speed的输出更拟合呢?
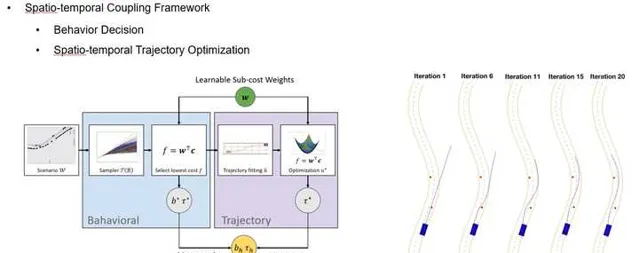
2.2 时空联合的框架
分bahavioral和trajectory
bahavioral采样轨迹,并剪枝,把剪枝后的轨迹下发给trajectory,做一个时空联合的规划
这种框架的输出会更有。
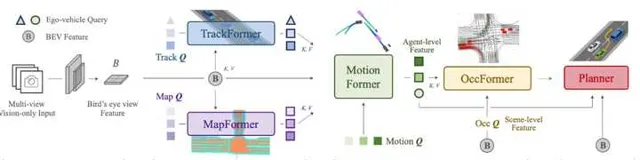
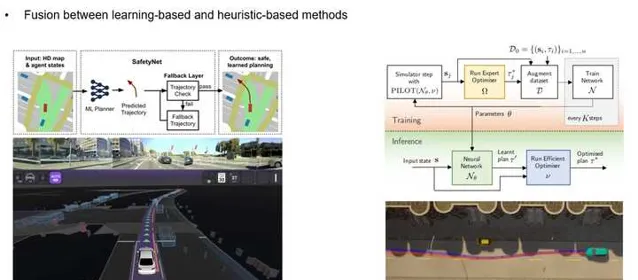
2.3 数据驱动的框架
UniAD CVPR2023 best paper
learning-base和rule-base的融合
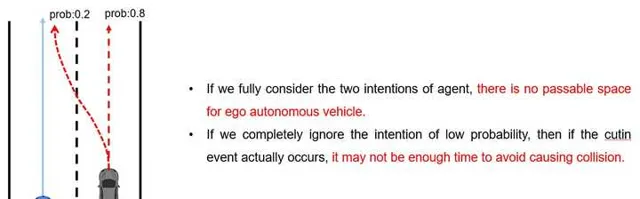
3. 如何在决策规划中处理概率性/不确定性的问题
背景:他车意图的不确定性
目标:既考虑对方车的意图又能保证自车的及时处理时间
应变规划Contingency planning,通过一个shared segment过度到多个分支,算是延迟决策。

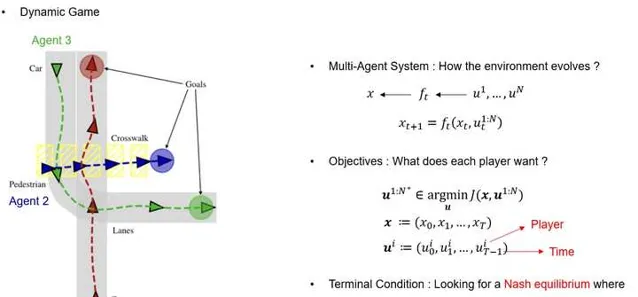
4. 交互式规划 Interactive Planning
自车的prediction在planning之前,所以预测拿不到当前规划的结果
prediction与planning应该是互相影响的
基于博弈论的方法对问题进行建模,寻找纳什均衡,使环境中的每个玩家无法通过改变自身的行为来让整个系统变得更优
iLRGame的项目,联合规划的建模,数学建模和推导
后续系列文章
转载请注名出处:作者:自动驾驶转型者,原文链接:【规控】01导论-知识点梳理-让你对智驾规控有个全局观
欢迎
点赞+收藏+关注
,后续会持续输出











