曾几何时,樵兄还特别气恼定速巡航多「鸡肋」,阻碍了我在车流中穿梭,可随着智能化技术的发展,智能驾驶的发展越来越迅速和先进。

在智能驾驶功能开发中,所能应对的场景越来越多,越来越复杂,同时随着高精地图和视觉技术的深入发展,各类场景下的领航辅助驾驶功能,追星逐月。
智能驾驶 vs. 丰富场景
在这里列举了绝大部分的汽车辅助驾驶(ADAS)所包含的功能,这些英文缩写经常把消费者弄得云里雾里,其实相对应得中文含义更为清晰,也明确表达了其适用的场景。
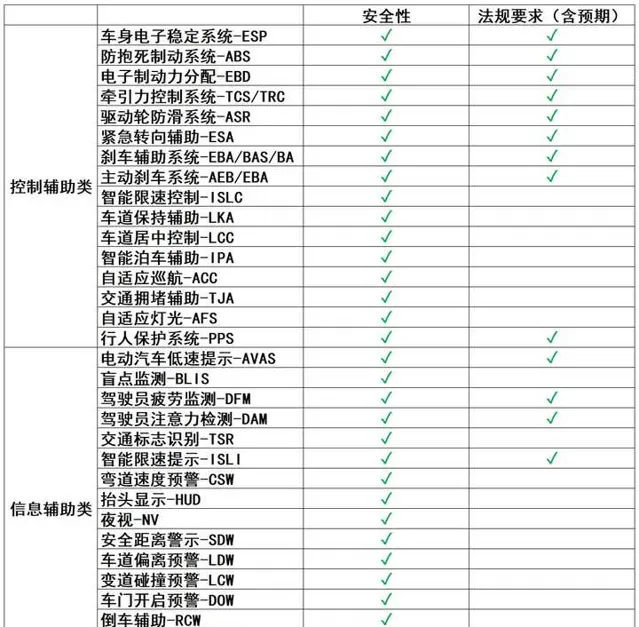
从列表中,我们不难发现,所有得驾驶辅助功能都是在增加驾驶员的安全驾驶属性,有得甚至是各个市场强制要求配置。 基本上分为两类控制辅助类和信息辅助类,控制辅助类是主动控制的辅助功能,而信息辅助则是通过声、光、电子显示、振动等感知反馈,提醒驾驶员安全驾驶。
那有人会问,Blue Cusier,X-Pilot,NIO Pilot,Autopilot都是什么,这些都是一个系统的整体叫法,这些系统是众多智能驾驶功能子系统的合集,从根本上都是 「感知-融合-决策-执行」 这一整套 「拟人化」 的人工智能产品。
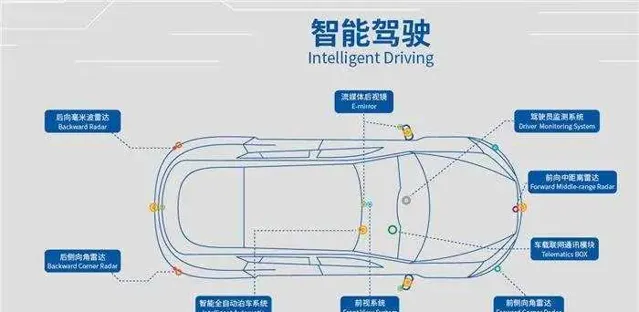
自动驾驶系统,会在感知上,融合多种手段比如视觉视像头、毫米波雷达、激光雷达、超声波雷达等,并于云端数据结合,通过神经网络算法和AI学习,提出决策指令,比如路径规划、执行器执行等。
可以分两种自驾情况来谈一谈智能驾驶功能的体验。
樵兄是位轻度自驾爱好者,过去的每一年,樵兄的至少长途自驾两次,短途若干次,走过新疆天山南北,越过云贵到达西双版纳,五进五出皖南,甘南大环线途径洛克之路到达川西,尝贵州美食美酒,简单在内蒙古的十分之一的面积上花了条直线就不值一提了。
高速路段居多-领航驾驶/自适应巡航带我越过云贵川到达西双版纳
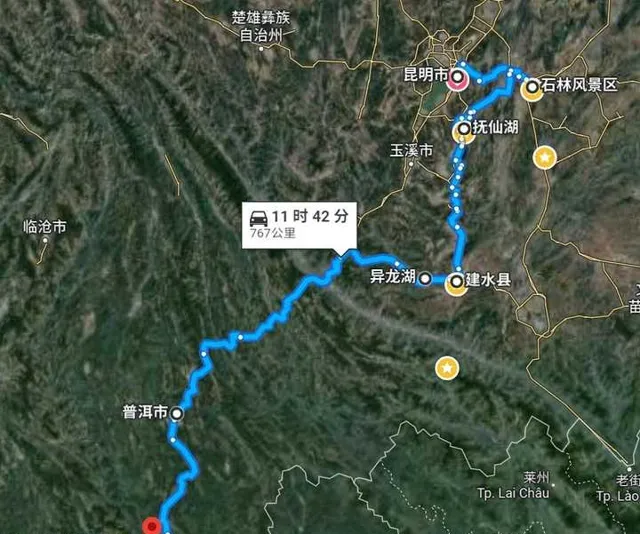
路线:重庆-昆明-抚仙湖-石林-弥勒-元阳-建水-西双版纳
这是一趟高速路段居多的自驾之行,从重庆出发,一路高速直达昆明,樵兄不喜欢热门,因此把弥勒、建水、元阳作为主要游玩点,最后到达西双版纳,整个旅程非常惊艳,而连接这些城市的都是高速,感叹「基建狂魔」的气概。
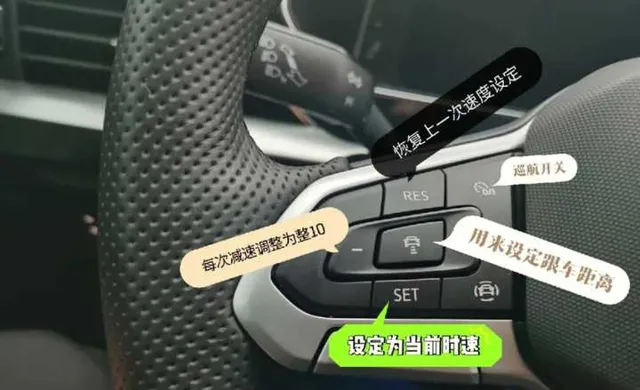
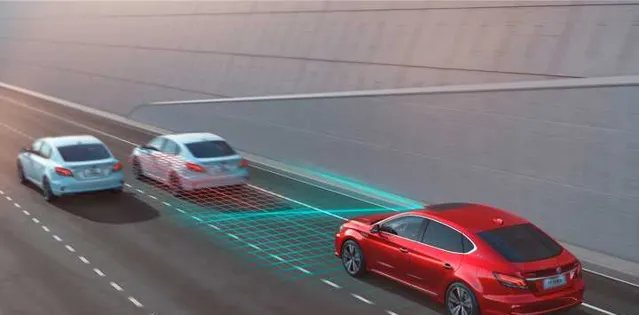
整个旅途之中,自适应巡航(ACC)开启,选定与前车之间的距离,设定最高车速,简单。大多时候,你只需要操作方向盘,整个旅程非常的舒适,疲劳感也减轻很多。如果你发现前车过于缓慢,也可以超车,调整跟车目标,保证旅途既安全又快速。
当樵兄疲劳袭来,驾驶员监控系统(DMS)随时监测到异样,配合车道居中控制(LCC)就能发挥它的左右,还通过车道偏离预警(LDW)比如方向盘震动、信息、警报等,提醒我需要休息。
甚至,在长时间驾驶的时候,车子还发出休息提醒,挺贴心的。同样,对于配备高速领航驾驶的汽车,则更加轻松,能够解放更多的驾驶员,保存精力。
城市环境居多-智能化助我甘南大环线途径洛克之路到达川西
路线:兰州-刘家峡水库-拉不楞寺-夏河草原-安多合作寺院米拉日巴佛阁-洛克之路-扎尕那-花湖-黄河九曲第一湾-莲宝叶则-郎木寺
甘南比起环青海湖来说,要小众一点点,洛克之路、扎尕那、花湖、拉不楞寺、郎木寺,无一不鼎鼎有名,甘南很多时候是青藏藏族文化旅游的平替,连接他们的是更多国道、县道、乡道。有句话说的好,高速和铁路让我们错过了太多的大自然的鬼斧神工和人类的巧夺天成,神圣的雪山和无边无际的大草原。

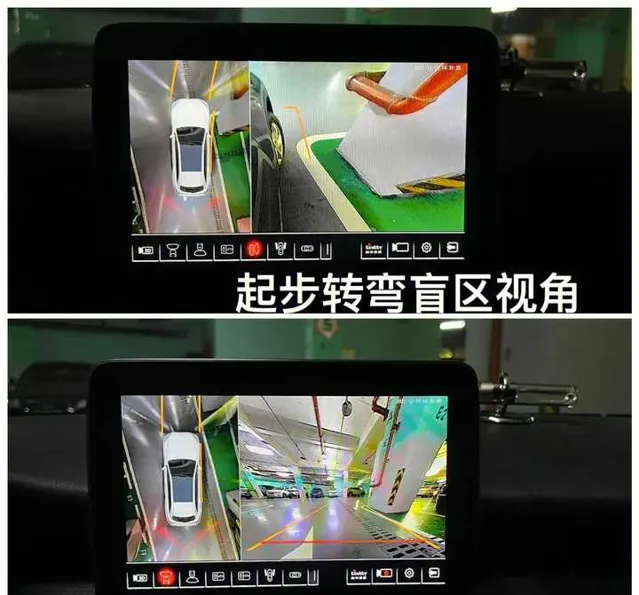
在非高速环境中,智能驾驶功能的领航服务或许不再被经常需要,国道、县道、乡道环境复杂,驾驶环境受到光线、行人、障碍物的影响。这个时候,360全景辅助泊车(PA360),以及全副武装的雷达系统,可以探测多众多潜在的安全隐患,不惧复杂的路况。转弯时的辅助影响,也可以帮助你及时了解到可能潜在的安全风险。
低速跟车功能是自适应巡航功能的升级版,以前自适应巡航(ACC)在60km/h的时候,不起作用,现在这种自动跟车功能扩展到了低速工况,这样在城市里走走停停时,也能够解决在堵车等待红绿灯的起起停停,大大减轻驾驶负担。

诸如此类的控制类或信息类的智能驾驶功能,还有很多,盲点检测、刹车辅助等。
安全是汽车智能化发展的核心,就樵兄无论是高速自驾游,还是乡间道路穿梭,智能驾驶系统的存在,可以更多的解放驾驶员,减少精力消耗,同时座舱监控系统,保证驾驶员能够智能驾驶功能被正确使用,亦可监测到驾驶员疲劳,及时提醒。这是一篇真香警告,樵兄体验下来,还是非常棒的,完全改变樵兄之前的认知。
聊汽车界的八卦和正儿八经,请关注@四方樵。









