【先寫這麽多,後面慢慢詳細寫】
最近比較忙,馬上要去維吉尼亞理工,還有一大堆裝置運不過去,計畫暫時鴿一下。。。詳細的制作過程以後寫

————————————————————————
 桌上跑一跑~
https://www.zhihu.com/video/1150354867443920896
桌上跑一跑~
https://www.zhihu.com/video/1150354867443920896
我家樓板吊頂漏水,高考後閑極無聊,打算造個小車進去看看(只是為造車找個理由哈哈哈)
嗯,既然進去看看,那就得有圖傳功能。最好還要有一定的環境防護能力,不然隨便一滴水滴電路板或MCU上就冒煙了。而且還要一定越野能力不然吊頂裏面一個木頭架子就能卡住底盤有去無回。
綜合考慮一波,大體的方案就出來了:履帶底盤、車體3D打印一次成型、樹莓派 x ARDUINO 。樹莓派做圖傳順便把指令透過串口傳給ARDUINO,ARDUINO控制底盤。
//———【開始閉門造車】—————————
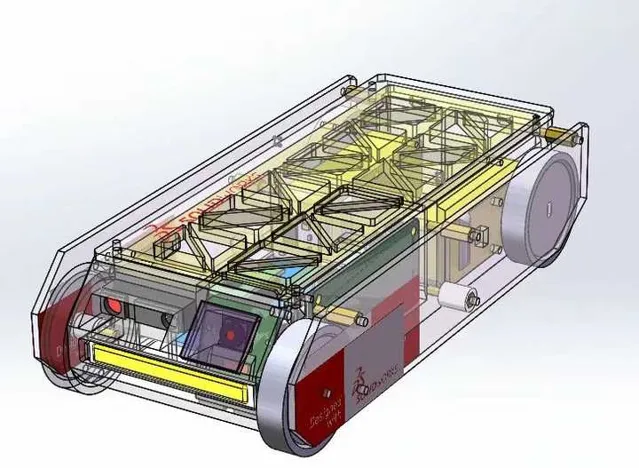
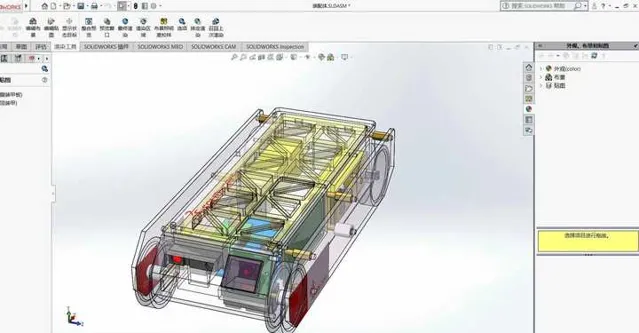
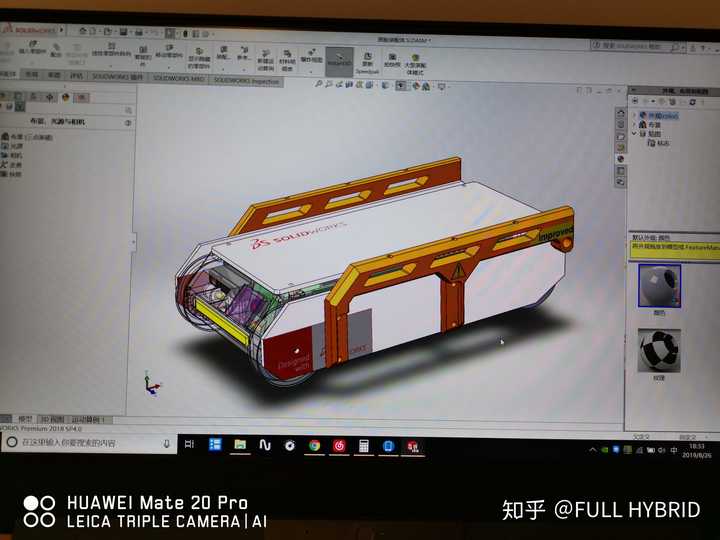
照例先是畫圖啦,SOLIDWORKS大法好
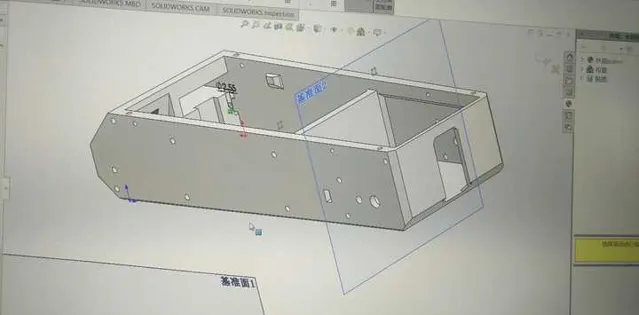
車體使用3D印表機一次成型。
總體結構做的還算比較緊湊,
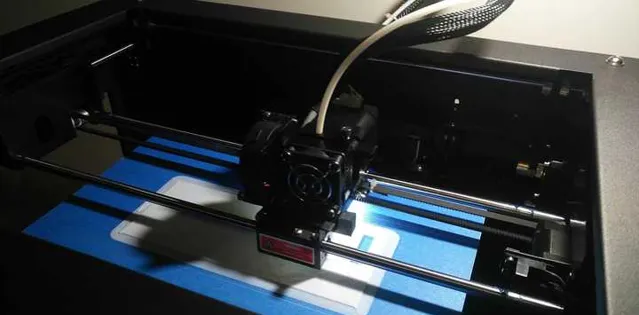


頂板和側裙板是用雷射切割來搞的,去學校白嫖了一波雷射切割機(圖就不放了免得被打哈哈哈)
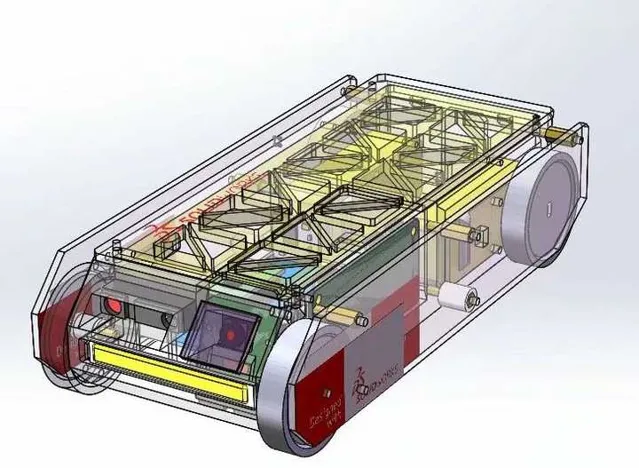
車體正臉長這個樣子。。。。


有2個紅外測距傳感器用於碰撞/跌落前自動剎車,左邊是紅外網路攝影機,網路攝影機前方是有機玻璃護罩,下方的黃色長條是補光燈。所有部件都使用熱熔膠密封間隙防止進水,目標是環境防護等級做到IP64(沒測過)
//**************************************
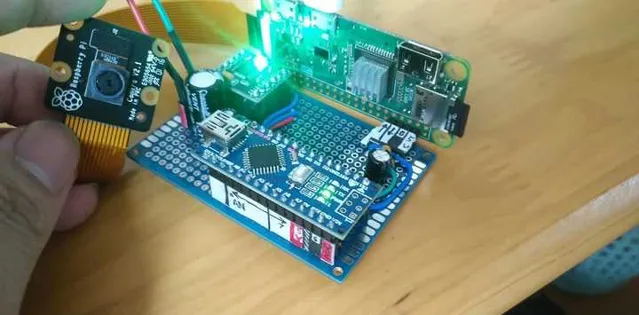
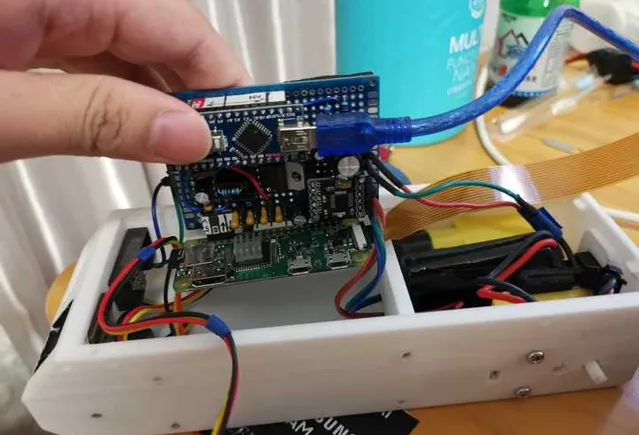
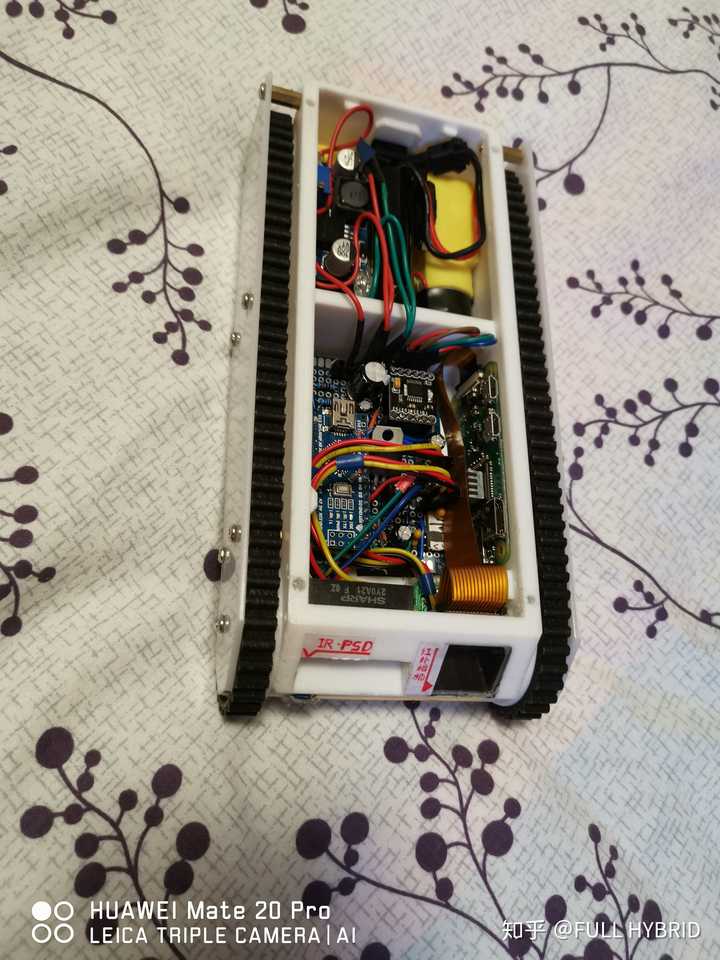
機械部份差不多了。。。該開始電控部份了,註入靈魂~
白手起家2333 ,無視那個頭子被捅彎了的撈皮電烙鐵(3D打印件有個孔不通,拿電烙鐵懟上去一波怒**,結果孔沒有通,烙鐵彎了。。。彎了。。。悲傷的故事)



用ARDUINO NANO控制底盤,樹莓派zero W做上位機負責圖傳與遠端控制。
半路買了個T12焊台,爽的不要不要的(終於不用每次預熱烙鐵都等幾分鐘了)

中途花樣咕咕咕,拖了好久才弄完。。。。。。無視我的垃圾走線與焊工


電機驅動用的是DRV8833,效率挺高的幾乎沒有任何發熱,體積還特小。。。除了耐壓值之外完全吊錘L298N。強烈推薦!
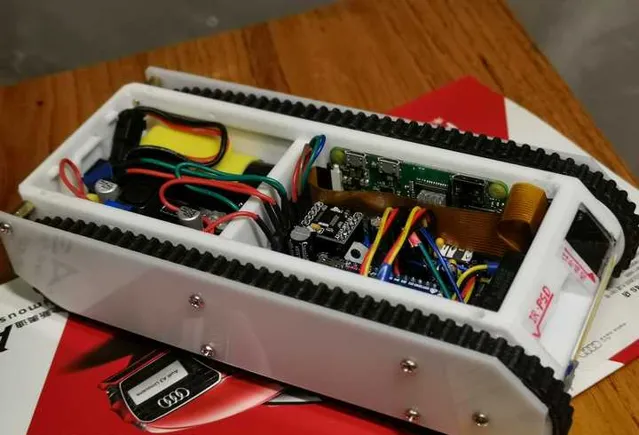
之後就是組裝與測試了

考慮到後面可能添加一些新功能,而我不喜歡有太多依賴項。所以沒用第三方多工庫,在nano 上跑的控制程式是基於狀態機思想 用c++寫的。可以同時跑多個任務。
而樹莓派的網頁端圖傳與通訊則是托我的好基友幫忙做的(非常感謝他幫忙,差點計畫就搞不出來了,我對linux不怎麽熟)。
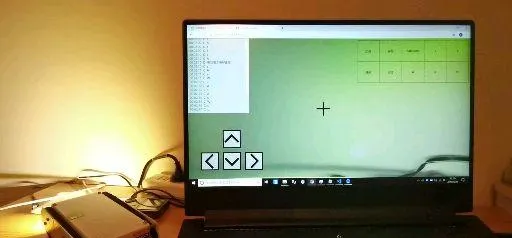
下面是圖傳系統測試時的截圖(紅外相機視角可以看到PSD傳感器打出去的紅外雷射束)
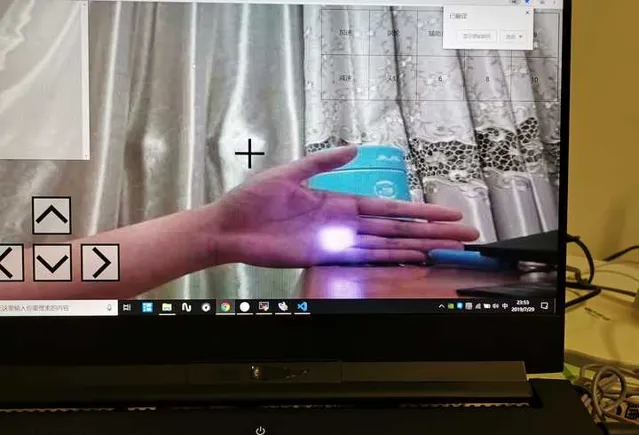
圖傳我們采用的mjpge-streamer方案(就是每秒暴力發n張jpge圖片重新整理),按目前的圖片品質與分辨率配置,幀率大概在20fps左右。沒有什麽延遲,只要在同一個wifi下就能進行控制(其實掛個ngrock,就算隔著太平洋也能控制它,至於網路穩不穩定另說哈哈哈)。
//===========組裝與叠代=============
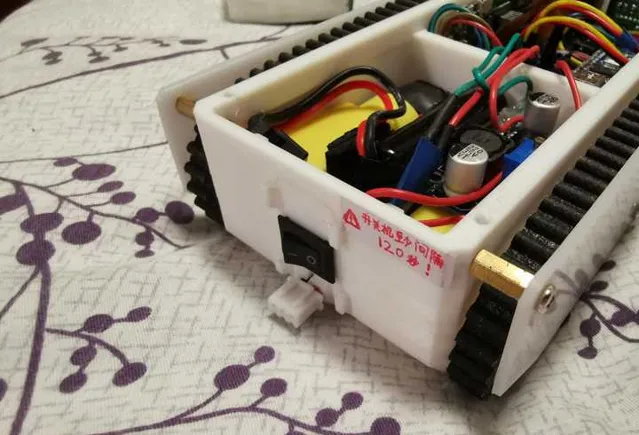
最初,內建的5V裝置都由板載的AMS1117線性穩壓器供電(為了省空間)。測試時隱隱約約感覺到車體PLA材料在散發著甜甜的香氣,大事不妙,一摸燙得要命。。。好吧穩壓器過載了,我只留了25%的負載余量。
只能擠掉為IMU慣性單元預留的空間(本來打算做自動防翻車功能。。。),老老實實在後艙加了個DC穩壓模組。

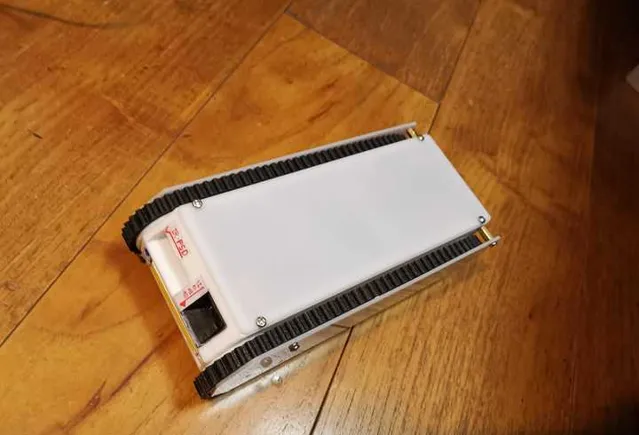
裝上履帶與側板 頂蓋,完工!
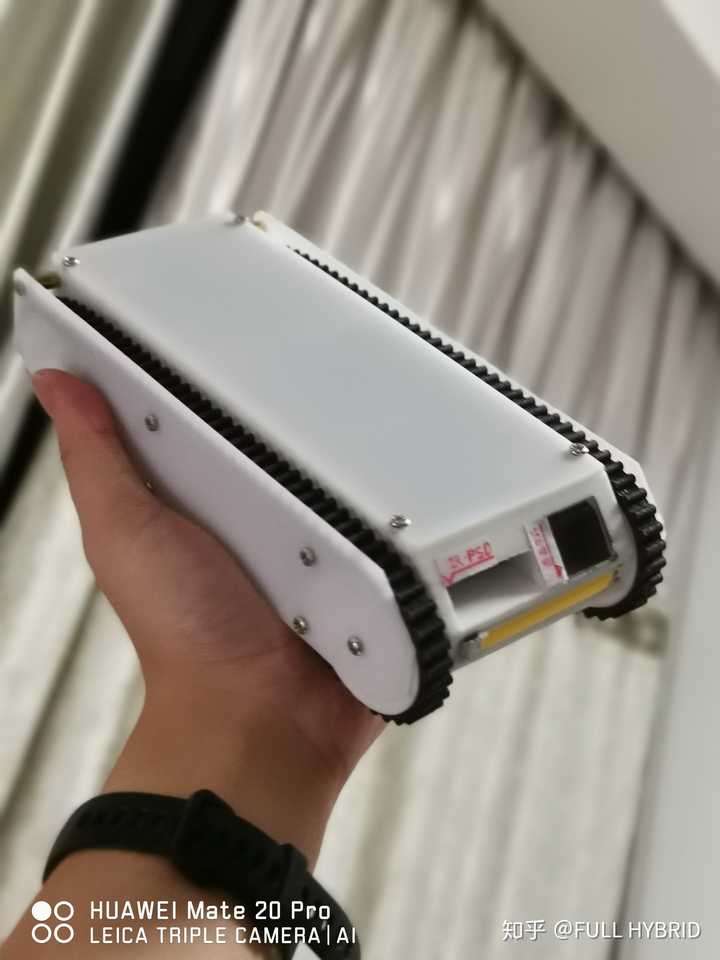

怎麽感覺有點像元首的歌莉婭...

//——————————更新——————————
吊頂夾層探險沒去成,我尋思這視訊小車功能太單一了,我又懶得改車體頂部結構,換一個功能就要改一次麻煩死了。。。。嗯。。。那麽

下一步,在車體頂部加裝旋轉炮塔或是別的奇奇怪怪的東西
//———————————————————————
昨天室友覺得這個小家夥的車燈太刺眼了。頓時起了邪念加了個爆閃模式,每秒15次爆閃,肉眼看會有點點暈(視訊因重新整理率問題,看不出來)
又一個沒啥用的功能 https://www.zhihu.com/video/1149636123335794688//------NANO ROVER計畫完結撒花--
我的新計畫hyper Rover已經開始研發了。HYPER ROVER設計也是履帶機器人底盤,大小近似於膝上型電腦,可以很方便地塞進背包。最高速度18~25km/h,可能會采用主動懸掛,並部份借鑒"粗齒鋸"高速履帶車的設計。預計今年8月完工,敬請期待。












